圆形海缆埋设犁入犁口张力测量、控制方法及系统与流程
- 国知局
- 2024-10-09 14:45:14
本发明涉及海缆敷设,尤其涉及一种圆形海缆埋设犁入犁口张力测量方法、圆形海缆埋设犁入犁口张力测量系统、圆形海缆埋设犁入犁口张力控制方法及圆形海缆埋设犁入犁口张力控制系统。
背景技术:
1、海缆是用绝缘材料包裹的电缆,铺设在海底,分海底通信电缆和海底电力电缆,现代的通信海底电缆都是使用光纤作为材料,传输电话和互联网信号,用于电信传输。
2、在海缆建设中,需要将海缆埋设于海底,悬链线方式为目前较为主流的一种敷设方式,通过海缆船配合埋设犁进行线缆敷设。在悬链线方式敷设作业时,敷设犁采用海缆船拖拽牵引运动,需要对海缆张力进行控制,因为张力过大容易出现机械损伤,张力过小而容易出现海缆打扭。而放缆速度直接决定了海缆张力。
3、海底环境较为复杂,当埋设犁上坡或下坡时,若仍保持原放缆速度前进,则将导致海缆张力变大或变小,此时若不及时调整,则会带来不利影响,但目前缺乏一种可靠的张力实时计算方法、系统或装置等以及根据实时计算的张力控制放缆速度的方法、系统或装置。
技术实现思路
1、本发明提供一种圆形海缆埋设犁入犁口张力测量、控制方法及系统,解决的技术问题在于:如何实时测量埋设犁入犁口处海缆的张力,以及如何根据实时测量的张力控制海缆船的放缆速度。
2、为解决以上技术问题,本发明提供圆形海缆埋设犁入犁口张力测量方法,包括步骤:
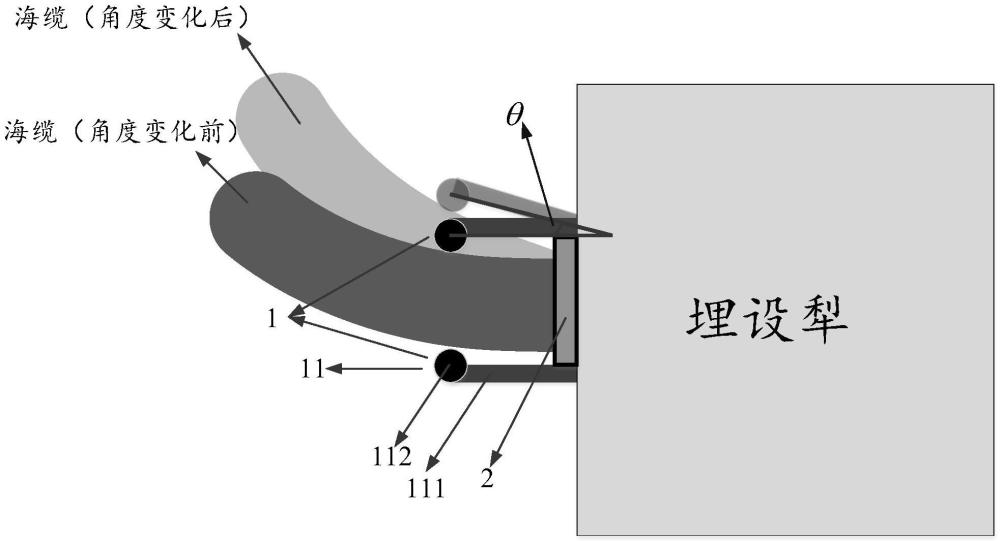
3、s1、测量埋设犁入犁口处海缆的角度变化记为θ,以及在角度偏转方向上产生的压力记为f;
4、s2、根据θ及f计算入犁口处海缆的张力t。
5、进一步地,在所述步骤s2中,根据下式计算张力t:
6、t=f/sinθ。
7、进一步地,测量θ包括步骤:
8、s11、围绕入犁口处海缆布置接触式角度传感器阵列,所述接触式角度传感器阵列包括多个角度传感器,该多个角度传感器围绕入犁口处海缆等间隔环形布置,且该多个角度传感器的安装位置使得入犁口处海缆处于预设角度时,每个角度传感器的被动端均与入犁口处海缆接触但无压力,当入犁口处海缆发生角度偏转时,对应方向的角度传感器的被动端受海缆偏转带来的压力发生相应角度的偏转;
9、s12、每隔预设时间段获取所述接触式角度传感器阵列中角度传感器的最大角度测量值作为θ。
10、进一步地,在所述步骤s11中,布置多个角度传感器时,每个角度传感器的一端通过支架固定在埋设犁入犁口,所述支架与入犁口处海缆水平,而每个角度传感器的另一端即所述被动端通过滚柱无压力接触海缆。
11、进一步地,在所述步骤s1中,测量f包括步骤:
12、s1a、在埋设犁上固定接触式压力传感器阵列,所述接触式压力传感器阵列包括多个压力传感器,该多个压力传感器围绕入犁口处海缆等间隔环形布置,且该多个压力传感器的安装位置使得入犁口处海缆处于预设角度时,每个压力传感器的感应端均与入犁口处海缆接触但无压力;
13、s1b、每隔预设时间段获取所述接触式压力传感器阵列中有压力输出的压力传感器的最大压力测量值作为f。
14、进一步地,在所述步骤s1a中,布置多个压力传感器时,每个压力传感器的一端通过支座固定在埋设犁入犁口,所述支座与入犁口处海缆垂直,而每个压力传感器的另一端即所述感应端通过滚珠无压力接触海缆,在所述滚珠与所述支座之间还设置有应变片。
15、本发明还提供一种圆形海缆埋设犁入犁口张力测量系统,其关键在于:包括接触式角度传感器阵列、接触式压力传感器阵列和张力计算单元;
16、所述接触式角度传感器阵列包括多个角度传感器,该多个角度传感器围绕入犁口处海缆等间隔环形布置,且该多个角度传感器的安装位置使得入犁口处海缆处于预设角度时,每个角度传感器的被动端均与入犁口处海缆接触但无压力,当入犁口处海缆发生角度偏转时,对应方向的角度传感器的被动端受海缆偏转带来的压力发生相应角度的偏转;所述接触式角度传感器阵列将发生偏转的角度传感器的最大角度测量值记为θ;
17、所述接触式压力传感器阵列包括多个压力传感器,该多个压力传感器用于围绕入犁口处海缆等间隔环形布置,且该多个压力传感器的安装位置使得入犁口处海缆处于预设角度时,每个压力传感器的感应端均与入犁口处海缆接触但无压力;所述接触式压力传感器阵列将有压力计数的压力传感器的最大压力测量值记为f;
18、所述张力计算单元用于根据角度测量值θ和压力测量值f计算入犁口处海缆的张力t。
19、优选的,所述张力计算单元根据下式计算入犁口处海缆的张力t:
20、t=f/sinθ。
21、本发明还提供一种圆形海缆埋设犁入犁口张力控制方法,其关键在于,包括步骤:
22、x1、采用所述的圆形海缆埋设犁入犁口张力测量方法或所述的圆形海缆埋设犁入犁口张力测量系统测量圆形海缆埋设犁入犁口处海缆的张力t;
23、x2、计算张力t与预设张力之间的差值△t;
24、x3、根据△t调整海缆船的放缆速度,若△t大于0,则提高海缆船的放缆速度;若△t小于0,则降低海缆船的放缆速度;若△t=0,则不改变海缆船的放缆速度。
25、本发明还提供一种圆形海缆埋设犁入犁口张力控制系统,其关键在于,包括张力监测单元、张力对比单元、张力控制单元;
26、所述张力监测单元用于所述的圆形海缆埋设犁入犁口张力测量方法或所述的圆形海缆埋设犁入犁口张力测量系统测量圆形海缆埋设犁入犁口处海缆的张力t;
27、所述张力对比单元用于计算张力t与预设张力之间的差值△t;
28、所述张力控制单元用于根据△t调整海缆船的放缆速度,若△t大于0,则提高海缆船的放缆速度;若△t小于0,则降低海缆船的放缆速度;若△t=0,则不改变海缆船的放缆速度。
29、本发明提供的圆形海缆埋设犁入犁口张力测量方法及系统,通过测量埋设犁入犁口处海缆的角度变化θ和在角度偏转方向上产生的压力f实时计算入犁口处海缆的张力t,便于根据该张力t实时调整放缆速度,从而保持张力恒定。该张力测量方法及系统采用接触式角度传感器阵列和接触式压力传感器阵列分别测量θ和f,该接触式角度传感器阵列和接触式压力传感器阵列均由多个角度传感器或压力传感器构成,并且这些传感器根据海缆和埋设犁的结构特殊布置,测量结果快速、精准且精度较高。
30、本发明提供的圆形海缆埋设犁入犁口张力控制方法及系统,根据实时测量的埋设犁入犁口处海缆的张力,而实时调整海缆船的放缆速度,能够使得埋设犁入犁口处海缆的张力在复杂海底环境的敷设中保持恒定,能够保证海缆以较为理想的张力状态进入埋设犁,进而保护海缆不会因为张力过大出现机械损伤,或张力过小而出现打扭。
技术特征:1.圆形海缆埋设犁入犁口张力测量方法,其特征在于,包括步骤:
2.根据权利要求1所述的圆形海缆埋设犁入犁口张力测量方法,其特征在于,在所述步骤s2中,根据下式计算张力t:
3.根据权利要求2所述的圆形海缆埋设犁入犁口张力测量方法,其特征在于,在所述步骤s1中,测量θ包括步骤:
4.根据权利要求3所述的圆形海缆埋设犁入犁口张力测量方法,其特征在于:
5.根据权利要求1所述的圆形海缆埋设犁入犁口张力测量方法,其特征在于,在所述步骤s1中,测量f包括步骤:
6.根据权利要求5所述的圆形海缆埋设犁入犁口张力测量方法,其特征在于:在所述步骤s1a中,布置多个压力传感器(21)时,每个压力传感器(21)的一端通过支座(211)固定在埋设犁入犁口,所述支座(211)与入犁口处海缆垂直,而每个压力传感器(21)的另一端即所述感应端通过滚珠(212)无压力接触海缆,在所述滚珠(212)与所述支座(211)之间还设置有应变片(213)。
7.圆形海缆埋设犁入犁口张力测量系统,其特征在于:包括接触式角度传感器阵列(1)、接触式压力传感器阵列(2)和张力计算单元(3);
8.根据权利要求7所述的圆形海缆埋设犁入犁口张力测量系统,其特征在于,所述张力计算单元(3)根据下式计算入犁口处海缆的张力t:
9.圆形海缆埋设犁入犁口张力控制方法,其特征在于,包括步骤:
10.圆形海缆埋设犁入犁口张力控制系统,其特征在于,包括张力监测单元(4)、张力对比单元(5)、张力控制单元(6);
技术总结本发明涉及海缆敷设技术领域,具体公开了一种圆形海缆埋设犁入犁口张力测量、控制方法及系统,圆形海缆埋设犁入犁口张力测量方法及系统通过测量埋设犁入犁口处海缆的角度变化θ和在角度偏转方向上产生的压力F实时计算入犁口处海缆的张力T,便于根据该张力T实时调整放缆速度,从而保持张力恒定,测量结果快速、精准且精度较高。圆形海缆埋设犁入犁口张力控制方法及系统根据实时测量的埋设犁入犁口处海缆的张力,而实时调整海缆船的放缆速度,能够使得埋设犁入犁口处海缆的张力在复杂海底环境的敷设中保持恒定,能够保证海缆以较为理想的张力状态进入埋设犁,进而保护海缆不会因为张力过大出现机械损伤,或张力过小而出现打扭。技术研发人员:张志刚,陈秋萍,黄彬,宓王东,王思琪,胡德华受保护的技术使用者:浙江启明海洋电力工程有限公司技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/306376.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表