一种视觉位移测量系统及方法与流程
- 国知局
- 2024-10-15 10:16:50
本发明涉及大型水电工程大坝监测,尤其是涉及一种视觉位移测量系统及方法。
背景技术:
1、大型水电工程大坝外形监测是一项重要的工程监测项目,旨在确保大坝的结构安全和效能。监测的目的是及时发现大坝的变形、位移、裂缝或其他结构问题,从而采取适当的维护和修复措施。
2、大坝位移监测通常基于三角测量原理,使用高分辨率摄像头从固定参考点对大坝表面进行连续拍摄。通过图像处理技术,对比分析大坝表面标记点的位置变化,从而计算出位移量。
3、由于需要获得大坝高精度的视觉画面,固定参考点的位置与大坝的距离一般较近,一般是几百米,在这种距离下实际上固定参考点底部的地基部分实际上与大坝区域的地基部分地质关联性较大,在大坝区域出现地质位移情况时固定参考点底部的地基有可能会产生类似的位移,从而导致拍摄的视觉画面实际上不能精准反映大坝真实的位移。
4、公开号为cn115493508a的中国发明专利公开了一种应用于大坝表面变形机器视觉观测的装置及方法,包括第一观测墩和第二观测墩,所述第一观测墩上设有第一摄像头,所述第二观测墩上设有第一靶标,所述第一摄像头和第一靶标之间设有若干中间测点装置。通过在第一摄像头和第一靶标之间设置若干中间测点装置,实现了长距离大坝表面变形的观测。
5、上述技术方案虽然一定程度解决超长大坝在视觉监测中的变形问题,然而其摄像头依然安装在大坝附近区域的观测墩上,依然不能解决因观测墩与大坝区域同步位移造成的监测结果不能反映大坝变形的技术问题。
技术实现思路
1、为了解决上述技术问题,本发明提供一种视觉位移测量系统及方法。采用如下的技术方案:
2、一种视觉位移测量方法,包括以下步骤:
3、采用三组飞行测量单元分别进行第一次定位视觉测量,第一组飞行测量单元和第三组飞行测量单元分别对称位于待测量大坝坝体的两侧五十米以内位置,飞行高度高于待测量大坝坝体最高点五米到十米;
4、无人机测量远程服务器分别无线控制第一组飞行测量单元的多架测绘无人机挂载的电动云台动作,使挂载的摄像头拍摄的视觉画面组成待测量大坝坝体的第一次左侧视觉画面,分别记录第一组飞行测量单元的多架测绘无人机第一次拍摄的飞行定位参数和拍摄参数;
5、采用同样方法得到第一次右侧视觉画面,分别记录第三组飞行测量单元的多架测绘无人机第一次拍摄的飞行定位参数和拍摄参数;
6、第二组飞行测量单元的多架测绘无人机位于待测量大坝坝体中轴线上方十米到二十米,无人机测量远程服务器分别无线控制第二组飞行测量单元的多架测绘无人机挂载的电动云台垂直向下,使挂载的摄像头拍摄的视觉画面组成待测量大坝坝体的第一次正上方视觉画面,分别记录第二组飞行测量单元的多架测绘无人机的飞行定位参数和拍摄参数;
7、将第一次左侧视觉画面、第一次右侧视觉画面和第一次正上方视觉画面作为基准视觉图像;
8、设定时间间隔无人机测量远程服务器分别无线控制三组飞行测量单元再次进行测量,测量的飞行定位参数和拍摄参数均按照第一次拍摄的飞行定位参数和拍摄参数进行得到第二次左侧视觉画面、第二次右侧视觉画面和第二次正上方视觉画面,采用基于轮廓检测算法检测两次视觉画面轮廓的位移,并基于画面比例计算得到位移值。
9、通过采用上述技术方案,突破传统的大坝位移监测采用在观测墩上安装监测元件的方式,采用三组飞行测量单元进行视觉测量,第一组飞行测量单元和第三组飞行测量单元分别对称位于待测量大坝坝体的两侧五十米以内位置,测量的方式采用飞行到飞行高度高于待测量大坝坝体最高点五米到十米位置,若是尺寸很大的待测量大坝坝体,每组飞行测量单元的多架测绘无人机沿着待测量大坝坝体方向布置,第一次测量时,无人机测量远程服务器远程控制多架测绘无人机挂载的电动云台动作,使其挂载的摄像头拍摄的视觉画面能进行简单的拼接操作就可以组成待测量大坝坝体的第一次视觉画面,记录电动云台的拍摄参数包括角度参数等,并分别记录多架测绘无人机的飞行定位参数,也就是定位数据和高度数据,第一次的测量的这些参数,在后续的测量过程均需要完全一致,这样就保障了每次测量的基准一致,无人机的飞控技术可以保障两次悬停拍摄时的控制精度达到厘米级,厘米级的误差对于待测量大坝坝体是可接受的,而这个厘米级的误差不会是与待测量大坝坝体地质位移方向一致的误差;
10、因此采用无人机拍摄视觉画面来进行位移监测,不仅能通过视觉算法发现待测量大坝坝体内部位移,例如水库底部相对于大坝本体发生位移,还可以发现大坝整体发生位移。能避免因大坝区域地质环境发生整体位移时采用固定观测墩无法发现整体位移的技术缺陷。
11、可选的,飞行定位参数是北斗定位参数或gps定位参数,飞行定位参数还包括高度参数,高度参数通过测绘无人机的飞控系统获得。
12、通过采用上述技术方案,采用北斗定位参数或gps定位参数可以实现无人机两次悬停拍照时的位置误差达到厘米级,进一步保证了两次拍照的基准一致性。
13、可选的,设定时间间隔为两小时。
14、通过采用上述技术方案,由于无人机不能实现长时间的悬停,因此采用间隔巡检的方式对大坝进行形变监测,间隔时间可以灵活调整,优选两小时一次进行测量。
15、可选的,第一组飞行测量单元、第二组飞行测量单元和第三组飞行测量单元采用同一组飞行测量单元三次飞行实现。
16、通过采用上述技术方案,由于采用巡检的方式,可以采用一组飞行测量单元三次飞行就可以实现三个方向的视觉画面的获取。
17、可选的,基于轮廓检测算法包括以下步骤:
18、获得第一次视觉画面记为画面p1,第二次视觉画面记为画面p2;
19、基于检测目标特征库进行分别对画面p1和画面p2进行特征检测,目标特征库存储大坝本体特征、泄洪设施特征、水库底部特征、取水口特征、泵站特征、输水管线特征和调幅设施特征,画面p1得到的多个视觉特征分别记为pa、pa、……、pa17,画面p2得到的多个视觉特征分别记为pa21、pa22、……、pa27;分别对pa、pa、……、pa17进行轮廓线条化,得到的轮廓线条分别记为paol、paol、……、paol17,轮廓的几何中心点分别记为cp、cp、……、cp17;
20、分别对pa21、pa22、……、pa27进行轮廓线条化,得到的轮廓线条分别记为paol21、paol22、……、paol27,轮廓的几何中心点分别记为cp21、cp22、……、cp27;
21、采用图像比较算法依次画面p1轮廓的几何中心点与画面p2轮廓的几何中心点的画面位移,分别计算ps1、ps2、……、ps7。
22、可选的,画面比例计算的方法是:实测大坝本体特征的长边尺寸s,通过画面p1的pa21计算长边像素尺寸s1,得到画面比例画面p2轮廓的几何中心点相对画面p1轮廓的几何中心点的实际位移值的计算公式为psr=ps1·ar;分别计算ps1、ps2、……、ps7的实际位移值分别记为psr1、psr2、……、psr7。
23、通过采用上述技术方案,先基于目标特征库存储大坝本体特征、泄洪设施特征、水库底部特征、取水口特征、泵站特征、输水管线特征和调度设施特征识别出画面p1和画面p2中的对应特征,由于拍摄角度和条件均一致,特征识别比较容易,再进行轮廓线条化,基于轮廓线条化结果来进行几何中心点的计算,在opencv和python环境中可以使用cv2.moments函数对于每个轮廓计算其矩,并使用矩来找到质心,质心即几何中心点;
24、通过计算两幅图像中几何中心点的图像像素位移ps值,再通过画面比例来计算实际的位移值,可以输出每个特征项的位移值。
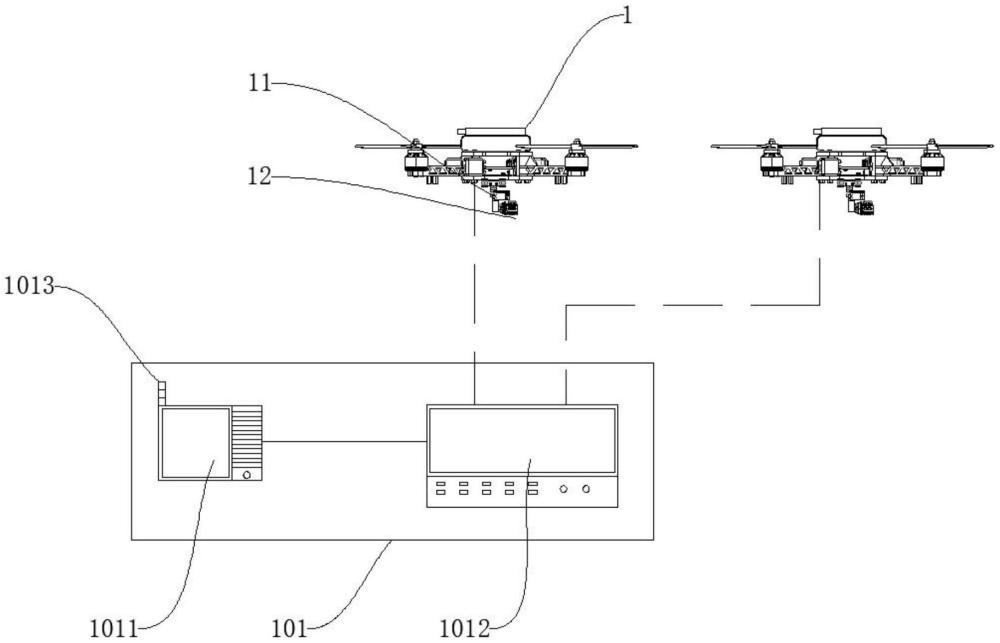
25、一种视觉位移测量系统,用于实现一种视觉位移测量方法,包括三组飞行测量单元和无人机测量远程服务器,飞行测量单元包括多架测量无人机,所述测量无人机底部挂载电动云台,所述电动云台的活动部上挂载摄像头,所述摄像头用于拍摄视觉画面;
26、无人机测量远程服务器分别与三组飞行测量单元无线通信连接,控制三组飞行测量单元的飞行定位参数和拍摄参数;
27、无人机测量远程服务器与三组飞行测量单元通信交互视觉图像。
28、可选的,无人机测量远程服务器包括视觉分析计算机和飞控平台,所述飞控平台分部与三组飞行测量单元无线通信连接,所述视觉分析计算机与飞控平台的数据输出端通信连接,基于同一组飞行测量单元的多架测量无人机挂载的摄像头拍摄的视觉图像拼接形成大坝整体视觉画面,并采用基于轮廓检测算法检测两次大坝整体视觉画面轮廓的位移,基于画面比例计算得到位移值并输出位移值结果。
29、通过采用上述技术方案,飞控平台可以同时无线控制多架测量无人机的飞行动作,通过第一次拍摄后得到的飞行定位参数和拍摄参数,后续可以自动化地进行同样飞行定位参数和拍摄参数的巡检拍摄,并自动化的输出位移值结果。
30、可选的,无人机测量远程服务器还包括声光报警器,所述视觉分析计算机控制声光报警器的执行动作,设置位移阈值,当视觉分析计算机输出位移值结果大于位移阈值时控制声光报警器启动报警。
31、通过采用上述技术方案,声光报警器可以在出现超过位移阈值的位移值时进行声光报警提醒工作人员及时进行核查,避免因大位移导致的事故。
32、综上所述,本发明包括以下至少一种有益技术效果:
33、本发明能提供一种视觉位移测量系统及方法,突破传统的大坝位移监测采用在观测墩上安装监测元件的方式,采用三组飞行测量单元进行视觉测量,测量的方式采用飞行到飞行高度高于待测量大坝坝体最高点五米到十米位置,第一次测量时,无人机测量远程服务器远程控制多架测绘无人机挂载的电动云台动作,使其挂载的摄像头拍摄的视觉画面能进行简单的拼接操作就可以组成待测量大坝坝体的第一次视觉画面,记录电动云台的拍摄参数包括角度参数等,并分别记录多架测绘无人机的飞行定位参数,在后续的测量过程均保持与第一次的测量完全一致的参数,保障了每次测量的基准一致;
34、采用无人机拍摄视觉画面来进行位移监测,不仅能通过视觉算法发现待测量大坝坝体内部位移,还可以发现大坝整体发生位移。能避免因大坝区域地质环境发生整体位移时采用固定观测墩无法发现整体位移的技术缺陷。
本文地址:https://www.jishuxx.com/zhuanli/20241014/317089.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表