设定装置、设定方法及存储介质与流程
- 国知局
- 2024-10-15 09:25:33
本发明涉及设定装置、设定方法及存储介质。
背景技术:
1、近年来,在工厂中由于人工费高涨、人材不足,会通过具有机械臂的机器人进行制造、加工、组装等作业,并期望对以往由人工进行的作业实现自动化。这样的机器人如专利文献1所记载的那样,例如,为了不在运行中与障碍物碰撞,有时会在运行机械臂之前设定禁止机械臂侵入的区域、即动作禁止区域而进行使用。例如,在设定动作禁止区域时,通过设定其位置和大小来实现安全的机器人动作。
2、专利文献1:日本特开2018-180725号公报
3、但是,在专利文献1记载的系统中,存在因想要设定的动作禁止区域的位置和形状而难以进行设定、或者因设定操作繁琐而在设定上需要较长时间的问题。
技术实现思路
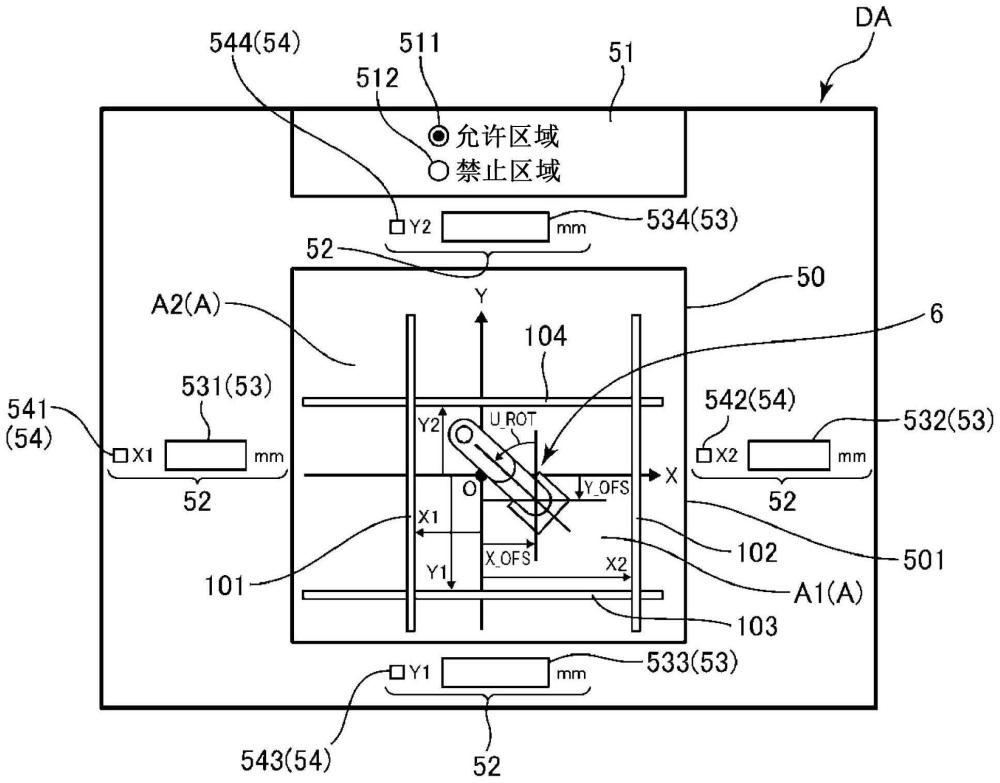
1、本发明的设定装置具备:显示部,显示限制区域设定图像,所述限制区域设定图像包括第一输入部和第二输入部,所述第一输入部用于选择允许机器人所具有的机械臂侵入的允许区域和禁止所述机械臂侵入的禁止区域中的任一限制区域并进行输入,所述第二输入部用于输入所述限制区域的边界;
2、获取部,获取通过所述第一输入部和所述第二输入部输入、设定的设定信息;以及
3、处理部,基于所述获取部所获取到的所述设定信息,对所述机械臂进行设定所述限制区域的处理。
4、本发明的设定方法具有:显示步骤,显示限制区域设定图像,所述限制区域设定图像包括第一输入部和第二输入部,所述第一输入部用于选择允许机器人所具有的机械臂侵入的允许区域和禁止所述机械臂侵入的禁止区域中的任一限制区域并进行输入,所述第二输入部用于输入所述限制区域的边界;
5、获取步骤,获取通过所述第一输入部和所述第二输入部输入、设定的设定信息;以及
6、处理步骤,基于在所述获取步骤中获取到的所述设定信息,对所述机械臂进行设定所述限制区域的处理。
7、本发明的存储介质中存储的设定程序用于执行:显示步骤,显示限制区域设定图像,所述限制区域设定图像包括第一输入部和第二输入部,所述第一输入部用于选择允许机器人所具有的机械臂侵入的允许区域和禁止所述机械臂侵入的禁止区域中的任一限制区域并进行输入,所述第二输入部用于输入所述限制区域的边界;
8、获取步骤,获取通过所述第一输入部和所述第二输入部输入、设定的设定信息;以及
9、处理步骤,基于在所述获取步骤中获取到的所述设定信息,对所述机械臂进行设定所述限制区域的处理。
技术特征:1.一种设定装置,其特征在于,具备:
2.根据权利要求1所述的设定装置,其特征在于,
3.根据权利要求2所述的设定装置,其特征在于,
4.根据权利要求1至3中任一项所述的设定装置,其特征在于,
5.根据权利要求4所述的设定装置,其特征在于,
6.根据权利要求1至3中的任一项所述的设定装置,其特征在于,
7.一种设定方法,其特征在于,具有:
8.一种存储介质,存储有设定程序,其特征在于,所述设定程序用于执行:
技术总结一种设定装置、设定方法及存储介质,能够容易且迅速地进行限制区域的设定。设定装置的特征在于,具备:显示部,显示限制区域设定图像,所述限制区域设定图像包括第一输入部和第二输入部,所述第一输入部用于选择允许机器人所具有的机械臂侵入的允许区域和禁止机械臂侵入的禁止区域中的任一限制区域并进行输入,第二输入部用于输入限制区域的边界;获取部,获取通过第一输入部和第二输入部输入、设定的设定信息;以及处理部,基于获取部所获取到的设定信息对机械臂进行设定限制区域的处理。技术研发人员:田中大受保护的技术使用者:精工爱普生株式会社技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/314061.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表