仿生服务型人形机器人感知控制系统的制作方法
- 国知局
- 2024-10-09 16:25:17
本发明设计机器人,尤其涉及仿生服务型人形机器人感知控制系统。
背景技术:
1、随着科学技术的不断发展,人工智能逐渐兴起,智能机器人也逐渐问世,机器人从只能完成简单指令到具有复杂的辨识度,使得机器人的发展高度得到提升。先进,机器人分为工业型机器人和服务型机器人,服务型机器人常见于家庭陪护、物流配送、医疗、教育以及特种作业等多元场景中。服务机器人涉及的技术较为复杂,因此服务型机器人与环境发生交互时,对于感知能力、准确度和信息处理能力有着较高的要求,才能使机器人更好的与人、复杂的环境进行交互。
2、服务型机器人通常设计为仿生的“人”型结构,通过在机器人的身体各部位装设传感器,采用传感器采集个部位的数据,并对采集数据进行处理,实现与外部环境的交互。
3、随着外界环境复杂度的增加,传统的机器人与环境交互过程中对于传感器信号的捕获能力还存在不足,在感知外部信息或进行数据处理时,会发生延时、计算精确度不高等问题,从而影响机器人的感知能力。此外,因人性机器人的设计较为复杂,设计多个交互系统(如动力、控制、感知等),故障时无法继续正常做出有效的决策,使得机器人适应环境能力降低的同时也降低了机器人的工作效率。因此需要设计一种感知信号捕获能力准确、数据处理能力强、抗干扰能力强和在故障时也能做出正确决策的感知控制系统。
技术实现思路
1、本发明为了克服现有技术的不足,提供一种感知信号捕获能力准确、数据处理能力强、抗干扰能力强和在故障时也能做出正确决策的感知控制系统。
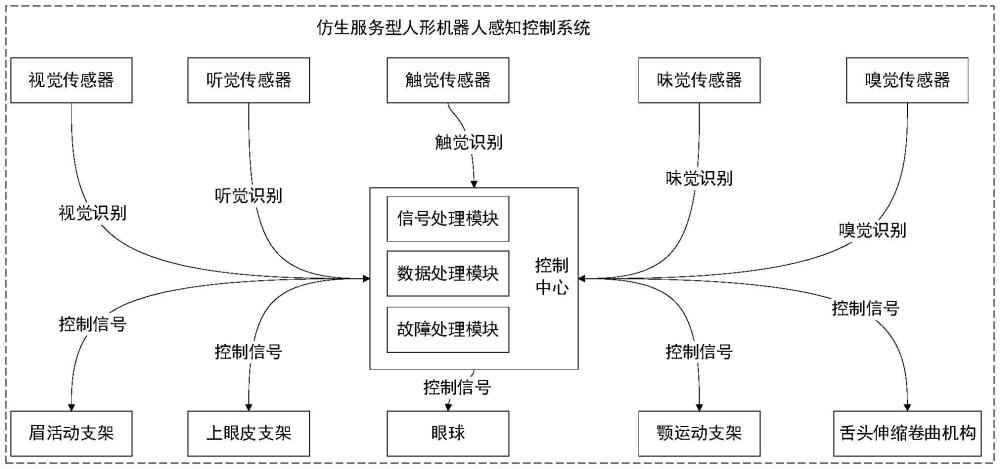
2、为了实现上述目的,本发明提供了仿生服务型人形机器人感知控制系统,包括:控制中心,其包括信号处理模块、数据处理模块和故障处理模块;
3、信号处理模块,用于接收机器人多个传感器发送的检测信号,对检测信号进行调节、滤波、去噪;
4、数据处理模块,包括多个处理器,采用多线程技术将检测信号的任务分为多个子任务,控制多个处理器并行处理任务;所述处理器采用实时操作系统来完成任务调度;
5、故障处理模块,用于优化机器人的故障容忍度,通过故障检测算法监测和分析机器人的行为和状态数据来识别潜在的问题,机器人发生故障时,通过自修复机制维持机器人的正常运行;所述自修复机制是指自动切换至备用系统供机器人使用。
6、优选的,信号处理模块通过串行总线接收多个传感器发送的检测信号;在信号处理模块的模拟前端采用可调增益放大器调节信号的放大级别,放大信号通过dps进行运算处理。
7、优选的,信号处理模块对检测信号进行处理时,采用差分信号处理电路去除噪声;采用低通、带通滤波器对检测信号进行滤波;采用奇偶校验和crc校验纠正和检测检测信号数据。
8、优选的,信号处理模块接收检测信号前,先对传输通道进行优化,其优化方法包括:
9、信号处理模块与多个传感器之间采用屏蔽电缆连接,采用差分信号传输数据;
10、采用错误检测和修正机制,通过在传输数据包中增加校验码来实时检测传输数据;
11、在机器人的物理层面和逻辑层面增加多个传输通道;
12、采用工业级连接器和接口进行连接,工业级连接器和接口包括:数据连接器usbtype-a、usb type-b、usb type-c、电源连接器dc、电源连接器ac、数据传输和控制信号连接器d-sub、工业以太网连接器m12 ethernet。
13、优选的,数据处理模块中,实时操作系统通过调整任务的优先级和调度算法来分配和调整任务;调整优先级方式包括优先级继承协议和优先级天花板协议,所述任务调度方式包括抢占式调度和时间片轮转调度。
14、优选的,数据处理模块处理并行处理多个子任务时,通过增加同类型的硬件加速器和将任务、数据并行的方式增加处理速度。
15、优选的,故障处理模块优化机器人的故障容忍度的方式包括:
16、采用冗余技术对机器人的硬件和软件设计,在硬件上,增加多余硬件;在软件上,采用错误检测和纠正算法对数据进行检测;
17、通过热插拔技术允许机器人在运行过程中安装或移除组件。
18、优选的,故障检测算法检测和分析机器人潜在问题的步骤包括:
19、集成多个传感器实时监测机器人的动态和电池状态,获得机器人的实时数据和电池状态数据;
20、从采集的数据中提取关键特征;
21、采用机器学习技术训练出用于判断机器人运行状态是否正常的机器学习模型;
22、在机器人运行时,采用机器学习模型对实时监测的数据进行训练,对机器人的行为进行评估,异常时发出预警。
23、优选的,机器人进行自修复机制的步骤包括:
24、获取故障检测算法检测的异常数据,分析故障类型和故障原因;
25、若关键组件故障,则将关键组件对应的工作系统自动切换为备用工作系统;
26、若非关键组件故障,则自动调整参数来适应当前状态。
27、优选的,故障处理模块采用多重冗余技术优化机器人的空间布局,其优化方式包括:
28、将机器人的关键功能设计为独立模块,每个独立模块都具有对应的备用模块;
29、将各模块进行冗余级别分类,评估各冗余级别对成本和性能的影响,选择影响最小的冗余策略;
30、调整备用模块的空间布局。
31、本发明提供的仿生服务型人形机器人感知控制系统,其有益效果在于:
32、1、通过信号处理模块对获取的机器人检测信号进行调节、滤波和调节,优化数据传输通道,使得机器人中多个传感器捕获数据的处理效率和精确度得到提高。
33、2、检测信号在传输过程经过处理后,数据处理模块通过多线程技术将接收的数据分为多个子任务,采用多个处理器共同完成数据分析,处理器采用实时操作系统(rtos)通过选择或优化实时操作系统的配置来满足机器人更高的实时性要求,有效提高了机器人整体运行速度和反应能力。
34、3、机器人运行过程中,由故障处理模块对机器人的工作状态和故障状态进行检测和处理。其中,通过优化机器人的故障容忍度,来提高机器人感知控制系统的稳定性和可靠性。当机器人故障时,通过故障检测算法检测和分析机器人行为和状态数据,以识别潜在的问题,包括动作异常、电池性能下降异常状态监测。基于检测异常问题,采用自修复机制在不影响机器人主要功能的情况下自动切换到备用系统或调整操作参数,以适应当前的工作状态,提高机器人的可靠性。
技术特征:1.仿生服务型人形机器人感知控制系统,其特征在于,包括:控制中心,其包括信号处理模块、数据处理模块和故障处理模块;
2.根据权利要求1所述的仿生服务型人形机器人感知控制系统,其特征在于,所述信号处理模块通过串行总线接收多个传感器发送的检测信号;在信号处理模块的模拟前端采用可调增益放大器调节信号的放大级别,放大信号通过dps进行运算处理。
3.根据权利要求2所述的仿生服务型人形机器人感知控制系统,其特征在于,所述信号处理模块对检测信号进行处理时,采用差分信号处理电路去除噪声;采用低通、带通滤波器对检测信号进行滤波;采用奇偶校验和crc校验纠正和检测检测信号数据。
4.根据权利要求1所述的仿生服务型人形机器人感知控制系统,其特征在于,所述信号处理模块接收检测信号前,先对传输通道进行优化,其优化方法包括:
5.根据权利要求1所述的仿生服务型人形机器人感知控制系统,其特征在于,所述数据处理模块中,实时操作系统通过调整任务的优先级和调度算法来分配和调整任务;调整优先级方式包括优先级继承协议和优先级天花板协议,所述任务调度方式包括抢占式调度和时间片轮转调度。
6.根据权利要求1所述的仿生服务型人形机器人感知控制系统,其特征在于,所述数据处理模块处理并行处理多个子任务时,通过增加同类型的硬件加速器和将任务、数据并行的方式增加处理速度。
7.根据权利要求1所述的仿生服务型人形机器人感知控制系统,其特征在于,所述故障处理模块优化机器人的故障容忍度的方式包括:
8.根据权利要求1所述的仿生服务型人形机器人感知控制系统,其特征在于,所述故障检测算法检测和分析机器人潜在问题的步骤包括:
9.根据权利要求1所仿生服务型人形机器人感知控制系统,其特征在于,所述机器人进行自修复机制的步骤包括:
10.根据权利要求1所述的仿生服务型人形机器人感知控制系统,其特征在于,所述故障处理模块采用多重冗余技术优化机器人的空间布局,其优化方式包括:
技术总结本发明提供了一种仿生服务型人形机器人感知控制系统,包括:控制中心,其包括信号处理模块,接收机器人多个传感器发送的检测信号,对检测信号进行调节、滤波、去噪,提高传感器捕获数据的处理效率和精确度;数据处理模块,其包括多个处理器,其采用多线程技术将检测信号的任务分为多个子任务,控制多个处理器并行处理任务;处理器采用实时操作系统来完成任务调度,有效提高了机器人整体运行速度和反应能力;故障处理模块,优化机器人的故障容忍度,通过故障检测算法监测和分析机器人的行为和状态数据来识别潜在的问题,机器人发生故障时,通过自修复机制在不影响机器人主要功能的情况下自动切换到备用系统或调整操作参数,以适应当前的工作状态。技术研发人员:李政冀受保护的技术使用者:三门通顺铆钉有限公司技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/312999.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表