一种基于无轴轮缘式推进器的水下矢量推进装置
- 国知局
- 2024-10-15 09:30:03
本发明涉及了一种水下矢量推进装置,涉及水下智能装备领域,具体涉及一种基于无轴轮缘式推进器的水下矢量推进装置。
背景技术:
1、随着人类对海洋的不断的探索深入,作为观察监测海洋领域的重要工具,自主式水下航行器auv(autonomous underwater vehicle)的研发逐渐引起了各国的重视。高机动、轻量化已成为auv智能装备的重要发展方向。研制出具备更高机动性能的轻量化auv装备,可大幅提升深远海综合探测能力。传统auv装备主要采用鳍舵进行辅助导向,该型auv控制力受水流速度的影响较大,且高航速下机动性能较差,易出现导向失稳现象。
2、水下矢量推进是近些年兴起的一种高效、可靠的水下推进技术,可大幅提升水下智能装备的灵活性。目前主流的水下矢量推进方案常采用导管式螺旋桨,例如发明专利cn109866902a提出的一种水下矢量推进装置,依靠电机驱动传动轴带动桨叶转动进行推进,依靠电机驱动串联机构实现矢量偏转。但由于传动轴壳体限制,推进器可偏转的角度较小,装备在高速航行下转向性能较差;且电机及传动系统占用了大量的湿舱空间,导致auv重心较浮心大幅后移,易出现失稳现象。
技术实现思路
1、为了解决背景技术中存在的问题,本发明所提供一种基于无轴轮缘式推进器的水下矢量推进装置。本发明采用无轴轮缘式水下推进器,将电机同桨叶集成一体,没有传统螺旋桨的轴线和传动系统,减少了机械部件的数量和复杂度,体积也大大缩小,且装置体积小、重量轻、结构简单、矢量偏转角度大,解决了现有技术中矢量偏转角度小、结构复杂、体积重量大的问题,继而提升auv智能装备的机动性和灵活性。
2、本发明采用的技术方案是:
3、本发明的基于无轴轮缘式推进器的水下矢量推进装置包括:
4、无轴轮缘式推进器,用于自主式水下航行器auv的直接矢量推进,安装在自主式水下航行器auv的外壳的尾部开放端口外部;无轴轮缘式推进器无需外接电机,可直接实现推进功能。
5、密封机构,用于自主式水下航行器auv的外壳的前部内区域的密封并安装在外壳的尾部内,将外壳的前部和尾部分别划分为干舱空间和湿舱空间。
6、矢量偏转机构,用于无轴轮缘式推进器的矢量偏转并铰接在密封机构和无轴轮缘式推进器之间。
7、所述的矢量偏转机构包括三个运动支链,第一运动支链包括第一伺服推杆伸缩杆、第一伺服推杆缸体、第一销轴和第一万向球铰,第二运动支链包括第二伺服推杆伸缩杆、第二伺服推杆缸体、第二销轴和第二万向球铰,第三运动支链包括,第三伺服推杆伸缩杆、第三伺服推杆缸体、第三销轴和第三万向球铰,第一伺服推杆缸体、第二伺服推杆缸体和第三伺服推杆缸体的缸身的端部分别通过第一销轴、第二销轴和第三销轴均匀间隔铰接在密封机构靠近外壳的尾部端口的一侧面上,第一伺服推杆缸体、第二伺服推杆缸体和第三伺服推杆缸体的推杆的端部分别通过第一万向球铰、第二万向球铰和第三万向球铰均匀间隔铰接在无轴轮缘式推进器靠近外壳的尾部端口的一侧面上。
8、所述的第一伺服推杆缸体、第二伺服推杆缸体和第三伺服推杆缸体所靠近的外壳的侧面分别设有开槽,开槽沿运动支链摆动方向开设,使得运动支链在摆动时不会与外壳发生碰撞。
9、所述的密封机构包括密封罩和固定基座,固定基座为环形板状,固定基座的边缘密封防水焊接至自主式水下航行器auv的外壳的内壁面,固定基座的板面垂直于外壳中心轴向布置;密封罩密封防水罩在固定基座的中心圆通孔处,密封罩为中心朝向固定基座的中心弯曲的罩体结构,密封罩位于矢量偏转机构的三个运动支链的中间;三个运动支链的第一销轴、第二销轴和第三销轴安装在固定基座靠近外壳的尾部端口的一侧面上且沿固定基座周向均匀间隔布置,三个运动支链间隔120°均布,且均为主动运动支链。
10、密封罩固连在固定基座上,呈空心柱体和半球壳的组合形状,其作用在于在不影响矢量偏转机构工作的情况下,用以尽可能增大外壳前部的内部干舱空间,提高auv的空间利用率,减小auv装备浮心与重心的位置差,提高航行时的稳定性。
11、所述的第一销轴、第二销轴和第三销轴的轴向均与环形基座的径向相垂直,使得无轴轮缘推进器在摆动时中心始终位于水下矢量推进装置的轴线上。
12、所述的密封机构的密封罩内还安装有供电机构,供电机构电连接矢量偏转机构的第一伺服推杆缸体、第二伺服推杆缸体和第三伺服推杆缸体和无轴轮缘式推进器。
13、所述的无轴轮缘式推进器包括若干桨叶、轴承和导罩,轴承布置在导罩的内侧圆周,桨叶连接在轴承转子上并沿圆周方向均匀间隔布置;供电后轮缘推进器直接驱动轴承转子带动桨叶转动;第一万向球铰、第二万向球铰和第三万向球铰沿圆周均匀间隔铰接在导罩靠近外壳的尾部端口的一侧面上。
14、所述的导罩在三个运动支链的协同带动下进行水平和竖直方向上±30°的偏摆。
15、当搭载水下矢量推进装置的auv装备在水下进行直航时,矢量偏转机构保持静止不动;当搭载水下矢量推进装置的auv装备需要转向时,控制矢量偏转机构带动无轴轮缘推进器偏转,产生使auv装备转向的偏转力。无轴轮缘推进器的桨叶均布固连在轴承转子上,轴承设置于导罩内部,供电后无轴轮缘推进器直接驱动轴承转子带动桨叶转动,无需外接电机。三个伺服推杆缸体的伺服推杆伸缩杆通过伸缩运动带动三个运动支链运动。
16、本发明的有益效果是:
17、1、本发明利用无轴轮缘推进器替代传统的导管式螺旋桨,减少了机械部件的数量和复杂度,大幅减少了装置占用的湿舱空间,有效改善了auv装备的内部布局,提高了auv装备航行时的稳定性。
18、2、本发明结构紧凑,易于控制,解决了现有技术中矢量偏转角度小、结构复杂、体积重量大的问题。
19、3、本发明利用矢量偏转机构对推进器的推力方向进行矢量控制,带动无轴轮缘推进器实现水平和竖直方向上±30°的偏转,极大地提高了auv装备的机动性和灵活性。
技术特征:1.一种基于无轴轮缘式推进器的水下矢量推进装置,其特征在于,包括:
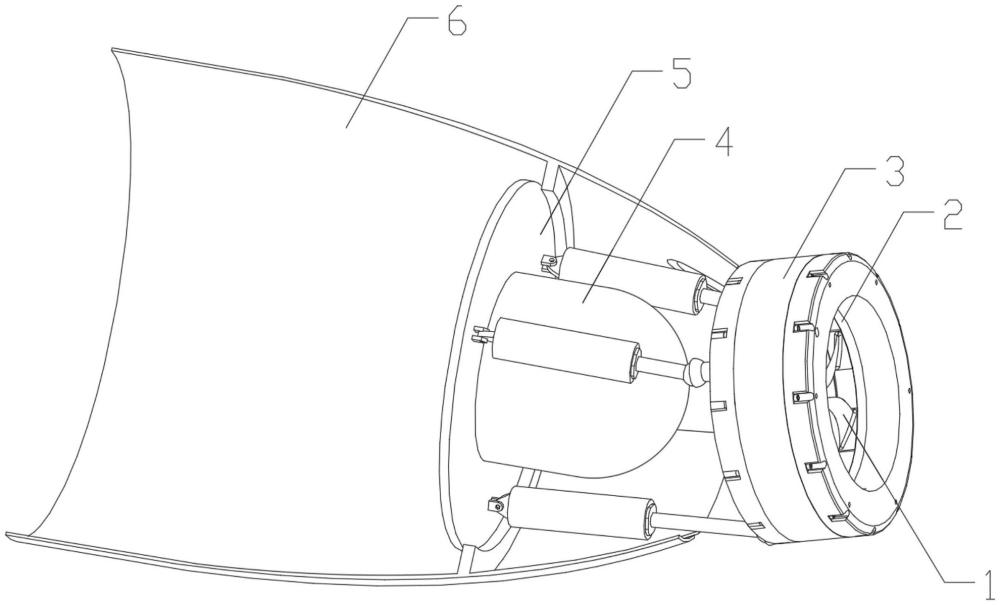
2.根据权利要求1所述的基于无轴轮缘式推进器的水下矢量推进装置,其特征在于:所述的矢量偏转机构包括三个运动支链,第一运动支链包括第一伺服推杆伸缩杆(7)、第一伺服推杆缸体(8)、第一销轴(9)和第一万向球铰(16),第二运动支链包括第二伺服推杆伸缩杆(10)、第二伺服推杆缸体(11)、第二销轴(12)和第二万向球铰(17),第三运动支链包括,第三伺服推杆伸缩杆(13)、第三伺服推杆缸体(14)、第三销轴(15)和第三万向球铰(18),第一伺服推杆缸体(8)、第二伺服推杆缸体(11)和第三伺服推杆缸体(14)的缸身的端部分别通过第一销轴(9)、第二销轴(12)和第三销轴(15)均匀间隔铰接在密封机构靠近外壳(6)的尾部端口的一侧面上,第一伺服推杆缸体(8)、第二伺服推杆缸体(11)和第三伺服推杆缸体(14)的推杆的端部分别通过第一万向球铰(16)、第二万向球铰(17)和第三万向球铰(18)均匀间隔铰接在无轴轮缘式推进器靠近外壳(6)的尾部端口的一侧面上。
3.根据权利要求2所述的基于无轴轮缘式推进器的水下矢量推进装置,其特征在于:所述的第一伺服推杆缸体(8)、第二伺服推杆缸体(11)和第三伺服推杆缸体(14)所靠近的外壳(6)的侧面分别设有开槽。
4.根据权利要求2所述的基于无轴轮缘式推进器的水下矢量推进装置,其特征在于:所述的密封机构包括密封罩(4)和固定基座(5),固定基座(5)为环形板状,固定基座(5)的边缘密封焊接至自主式水下航行器auv的外壳(6)的内壁面,固定基座(5)的板面垂直于外壳(6)中心轴向布置;密封罩(4)密封罩在固定基座(5)的中心圆通孔处,密封罩(4)为中心朝向固定基座(5)的中心弯曲的罩体结构,密封罩(4)位于矢量偏转机构的三个运动支链的中间;三个运动支链的第一销轴(9)、第二销轴(12)和第三销轴(15)安装在固定基座(5)靠近外壳(6)的尾部端口的一侧面上且沿固定基座(5)周向均匀间隔布置。
5.根据权利要求4所述的基于无轴轮缘式推进器的水下矢量推进装置,其特征在于:所述的第一销轴(9)、第二销轴(12)和第三销轴(15)的轴向均与环形基座(5)的径向相垂直。
6.根据权利要求4所述的基于无轴轮缘式推进器的水下矢量推进装置,其特征在于:所述的密封机构的密封罩(4)内还安装有供电机构,供电机构电连接矢量偏转机构的第一伺服推杆缸体(8)、第二伺服推杆缸体(11)和第三伺服推杆缸体(14)和无轴轮缘式推进器。
7.根据权利要求2所述的基于无轴轮缘式推进器的水下矢量推进装置,其特征在于:所述的无轴轮缘式推进器包括若干桨叶(1)、轴承(2)和导罩(3),轴承(2)布置在导罩(3)的内侧圆周,桨叶(1)连接在轴承(2)转子上并沿圆周方向均匀间隔布置;第一万向球铰(16)、第二万向球铰(17)和第三万向球铰(18)沿圆周均匀间隔铰接在导罩(3)靠近外壳(6)的尾部端口的一侧面上。
8.根据权利要求7所述的基于无轴轮缘式推进器的水下矢量推进装置,其特征在于:所述的导罩(3)在三个运动支链的协同带动下进行水平和竖直方向上±30°的偏摆。
技术总结本发明公开了一种基于无轴轮缘式推进器的水下矢量推进装置。装置包括无轴轮缘式推进器、矢量偏转机构和密封机构,装置安装在自主式水下航行器的外壳尾部,密封机构安装在外壳尾部内,矢量偏转机构铰接在密封机构和无轴轮缘式推进器之间,无轴轮缘式推进器位于外壳的尾部端口外。本发明利用无轴轮缘推进器替代传统的导管式螺旋桨,减少了机械部件的数量和复杂度,大幅减少了装置占用的湿舱空间,有效改善了AUV的内部布局,提高了AUV航行时的稳定性;本发明结构紧凑,易于控制,解决了现有技术中矢量偏转角度小、结构复杂、体积重量大的问题,矢量偏转机构带动无轴轮缘推进器实现水平和竖直方向上±30°的偏摆,继而提升AUV的机动性和灵活性。技术研发人员:钱鹏,江雨萌,王博涵,张柏海,王元奎,马恩林,张大海受保护的技术使用者:浙江大学技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/314342.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。