工业用机器人的制作方法
- 国知局
- 2024-10-15 09:59:32
本发明涉及工业用机器人。
背景技术:
1、以往,采用了在对多关节型机器人等的工业用机器人进行示教时,使用示教盒等的操作终端制作动作程序的方法。然而,在这种方法中无法直观地对机器人进行指示,存在不习惯的用户用于实现期望的动作的时间变长的问题。近年来,为了实现示教的效率化等,提出了工作人员直接接触工业用机器人进行示教的方法(所谓直接示教)。
2、有时在进行这种示教的情况下使用诸如下述的方法:在末端执行器与臂的顶端部之间配设力觉传感器(例如参照图12的力觉传感器100),在用户握持工业用机器人的手前端进行推拉的情况下,根据由该力觉传感器检测出的外力控制工业用机器人的动作(例如,参照专利文献1以及专利文献2)。大多数情况下在工业用机器人的驱动部中并设有减速机,如上述那样使工业用机器人动作并辅助用户对实现作业效率的提高等方面是有效的。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开平11-231925号公报
6、专利文献2:日本特开2020-203374号公报
技术实现思路
1、本发明所要解决的技术问题
2、在此,通常的力觉传感器构成为具备为了容易检测形变而有意降低刚性的形变体的结构,因此难以应对高负载。另外,由于刚性的降低,在使工业用机器人高速地动作时容易在手前端中产生振动,高速动作或高精度动作也变得困难。也就是说,工业用机器人的基本性能(例如可搬运能力、动作速度、动作精度)容易降低。这样,在抑制工业用机器人的基本性能的降低并且提高直接示教时的辅助功能方面,在外力的检测所涉及的结构中还有改善的余地。
3、本发明是鉴于上述例示出的技术问题等而提出的,其主要目的在于,抑制工业用机器人的基本性能的降低,并且对直接示教时的辅助功能的提高做出贡献。
4、用于解决技术问题的技术方案
5、以下记载用于解决上述技术问题的技术方案。
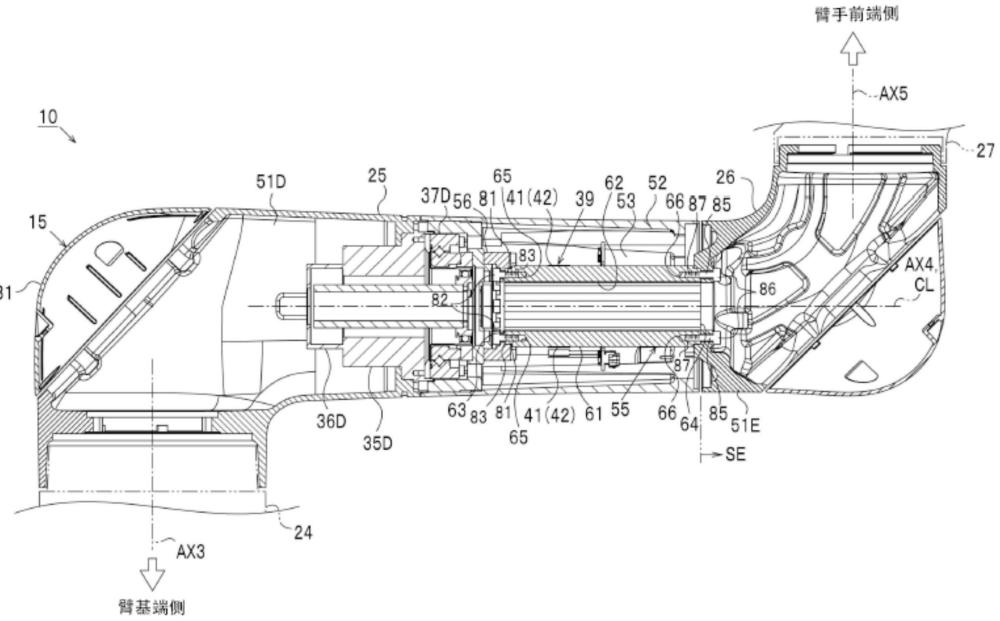
6、第一技术方案:一种工业用机器人(机器人15),具备:机器人本体(机器人本体21),具有多个臂结构体(第一上臂部25和第二上臂部26)一连串地连结的臂(臂31)及驱动该臂的关节部(第一关节部~第六关节部)的驱动机构(电机单元35和动力传递轴55);以及控制装置(机器人控制器93),控制所述机器人本体,其中,
7、作为所述多个臂结构体,包含第一臂结构体(第一上臂部25)、和相对于该第一臂结构体位于所述机器人本体的手前端侧的第二臂结构体(第二上臂部26),
8、所述驱动机构具有:
9、驱动部(电机单元35d),固定于所述第一臂结构体,具有致动器(伺服电机36d)及附属于该致动器的减速机(减速机37d);以及
10、动力传递轴(动力传递轴55),通过固定于所述减速机与所述第二臂结构体构成连结所述第一臂结构体与所述第二臂结构体的连结部的一部分,并向所述第二臂结构体传递来自所述驱动部的动力,
11、具备多个应变仪(应变仪41、42),所述多个应变仪安装于所述动力传递轴,并能够检测在该动力传递轴中产生的形变,
12、所述控制装置具有特定部(由机器人控制器93执行步骤s102的处理的功能),所述特定部根据来自这些应变仪的检测信号,特定(确定)作用于所述机器人本体的外力的大小以及方向,所述控制装置根据基于所述特定部的特定结果进行所述驱动部的驱动控制。
13、动力传递轴是为了支撑手前端侧的结构而确保相应的刚性的部件,不是如形变体等那样用于通过有意降低刚性而产生较大形变的部件。也就是说,即使在直接示教时机器人本体被推拉等而其外力传递至动力传递轴,发生的形变也微小。如本特征所示,若采用将应变仪安装于动力传递轴的结构,则与如以往那样将具备形变体的力觉传感器安装于臂的顶端的结构相比,能够抑制机器人本体的刚性降低和手前端重量的增加等。这在抑制工业用机器人中的移动速度和可搬运重量等的基本性能的降低方面是优选的。此外,由于能够通过使用动力传递轴使重量大的驱动部的位置向臂的基端侧偏移,因此反而可以说能够对基本性能的强化做出贡献。
14、另外,在将力觉传感器安装于手前端的情况下,在推拉与该力觉传感器相比靠臂的基端侧的部位的情况下,难以特定外力。也就是说,在良好地发挥基于力觉传感器的特定功能方面,用户的握持位置所涉及的限制变强。这一点,如本特征所示根据将应变仪安装于动力传递轴的结构,能够在远离机器人本体的手前端的位置特定外力,因此能够对用户的握持位置所涉及的限制的缓和做出贡献。
15、如上述那样在动力传递轴中产生的形变微小。因此,在试图由一个应变仪检测该形变的情况下容易受到噪声等的影响,存在外力特定的精度变低的顾虑。如果精度变低,则死区变大等,很难及时地进行辅助。特别是,由于辅助的始动延迟等,而无法适当地发挥辅助功能,这可能成为降低用户的满意度的主要原因。这一点,在本特征所示的结构中,通过利用多个应变仪抑制精度降低。即使并用多个应变仪也能够对于动力传递轴预估一定程度的大小,因此在增加应变仪的个数并抑制精度降低方面是优选的。
16、由于以上的理由,根据本特征所示的结构,能够抑制工业用机器人的基本性能的降低,并且对直接示教时的辅助功能的提高做出贡献。
技术特征:1.一种工业用机器人,具备:机器人本体,具有多个臂结构体一连串地连结的臂及驱动该臂的关节部的驱动机构;以及控制装置,控制所述机器人本体,其中,
2.根据权利要求1所述的工业用机器人,其中,
3.根据权利要求2所述的工业用机器人,其中,
4.根据权利要求1至3中任一项所述的工业用机器人,其中,
技术总结本发明抑制工业用机器人的基本性能的降低,并且对直接示教时的辅助功能的提高做出贡献。机器人(15)具备:臂(31),包含第一上臂部(25)以及第二上臂部(26)的多个臂结构体一连串地连结;以及力觉传感器(39),能够检测直接示教时作用于机器人(15)的外力。在第一上臂部(25)的外壳(51D)固定有电机单元(35D),通过在臂(31)的长度方向上延伸的动力传递轴(55)连结该电机单元(35D)与第二臂部(26)的外壳(51E)。在该动力传递轴(55)的外周面(61)安装有拉伸压缩应变仪(41)与剪切应变仪(42),通过这些拉伸压缩应变仪(41)以及剪切应变仪(42)构成上述力觉传感器(39)。技术研发人员:杉本亘,齐藤崇之受保护的技术使用者:电装波动株式会社技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/316035.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
手持式工具机的制作方法
下一篇
返回列表