一种工业机器人激光测距装置及方法与流程
- 国知局
- 2024-10-15 10:09:25
本发明涉及物流,尤其涉及一种工业机器人激光测距装置及方法。
背景技术:
1、物流仓储堆垛是指在仓库管理中,将货物依照特定规则有序地叠放,旨在高效利用存储空间、保障货物安全及便于存取作业的一种操作。通过采用如重叠式、交错式等不同的堆码方式,结合稳定性与安全性原则,堆垛不仅提高了仓库容量,还优化了物流效率,降低了运营成本。
2、在堆垛之前需要对输送的货物进行分类并按照不同的尺寸进行叠放,现有的方式是在机械手上设置位置校准结构以对货物位置进行识别和调整,然后进行叠放,这样长期使用后机械手上的校准结构准度会降低,从而不便于后续使用。
技术实现思路
1、本发明的目的在于提供一种工业机器人激光测距装置及方法,旨在可以在输送线上就对货箱的位置进行校正,执行机构只执行夹持和位置移动的功能,可靠性更高。
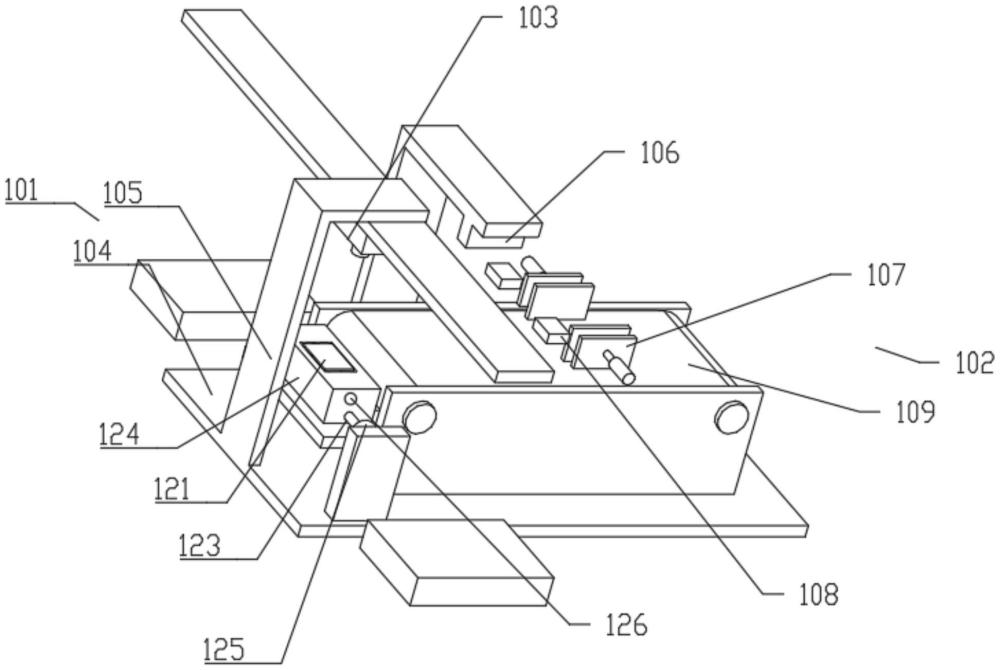
2、为实现上述目的,第一方面,本发明提供了一种工业机器人激光测距装置,包括支撑组件、输送组件和堆放组件,所述支撑组件包括底座和支撑架,所述支撑架与所述底座固定连接,并位于所述底座的顶部,所述输送组件包括货箱识别模块、校准器、测距组件、输送线本体和位置调节器,所述输送线本体转动设置在所述底座上,所述校准器设置在所述输送线本体的一侧,用于对货箱位置进行初步校正,所述测距组件,用于对校正位置后的货箱两侧的距离进行测量,所述位置调节器,用于基于两侧的距离差值对货箱位置进行校正;所述堆放组件,用于基于货箱信息对将校正后的货箱堆放到物流机器人上。
3、其中,所述货箱识别模块包括图像采集单元、图像处理单元、特征提取单元和身份匹配单元;
4、所述图像采集单元,用于通过安装在工业机器人或其他固定位置的高清摄像头捕捉货箱的图像;
5、所述图像处理单元,用于对获取的原始图像进行处理,包括去除噪声、改善光照不均、增加对比度和清晰度;
6、所述特征提取单元,用于从预处理后的图像中提取出用于识别的特征信息;
7、所述身份匹配单元,用于将解码得到的信息与数据库中的信息进行比对,获取货箱信息。
8、其中,所述校准器包括两个推动气缸、两个滑动板、两个推板和两个弹簧,两个所述滑动板滑动设置在所述输送线本体的两侧,两个所述推板滑动设置在两个所述滑动板的一侧,所述弹簧设置在所述滑动板和所述推板之间,两个所述推动气缸的输出端与两个所述滑动板连接。
9、其中,所述校准器还包括压力传感器,所述压力传感器设置在所述推板的一侧,用于对推板的推力进行检测。
10、其中,所述位置调节器包括控制信息生成单元、顶板、顶出气缸、螺杆、调节块和调节电机,所述调节块滑动设置在所述输送线本体的一侧,所述螺杆与所述调节块螺纹连接,所述调节电机的输出端与所述螺杆连接,所述顶出气缸固定在所述调节块上,所述顶板与所述顶出气缸的输出端连接,所述控制信息声场单元与所述调节电机连接。
11、其中,所述位置调节器还包括第二测距单元,所述第二测距单元设置在所述调节块上,用于对所述调节块的移动位置进行检测。
12、其中,所述堆放组件包括货箱分类模块、堆放指令生成模块和执行机构,所述货箱分类模块,用于基于货箱尺寸进行分类,所述堆放指令生成模块,用于基于分类后的货箱生成控制指令;所述执行机构,用于响应于控制系统的指令,调整货箱在物流机器人上的位置与姿态。
13、第二方面,本发明还提供一种工业机器人激光测距方法,包括:将货箱放置到输送线本体上进行输送;通过校准器将货箱的位置摆正,使得货箱的侧边和输送方向平行;通过测距组件对货箱两侧的相对距离进行测量,并计算距离差值;基于两侧的距离差值对货箱位置进行校正;基于货箱信息对将校正后的货箱堆放到物流机器人上。
14、本发明的一种工业机器人激光测距装置及方法,支撑组件由坚固耐用的底座与稳固的支撑架构成,底座确保整个系统稳定站立,而支撑架则垂直固定于底座顶部,为输送组件与堆放组件提供了可靠的悬挂与安装平台,保证了整个装置在高强度作业环境下的稳定运行。输送组件的货箱识别模块利用先进的机器视觉技术,如条形码阅读或rfid扫描,自动捕获并识别每个货箱的唯一标识和尺寸信息。校准器紧邻输送线本体设置,利用机械结构对进入输送线的货箱进行初步定位校正,确保后续处理的准确性。测距组件配备高精度激光测距传感器,精确测量校正后货箱两侧的微小距离差异,为精细化调整提供数据支持。位置调节器依据测距组件提供的数据,通过伺服电机或气动系统,微调货箱位置,确保两侧距离的绝对均衡,避免堆放时产生偏斜或不稳定。堆放组件接收来自控制系统基于货箱信息(包括尺寸、重量、优先级等)的指令,精确控制物流机器人的动作路径与力度,将经过精确校正的货箱安全、高效地堆放到预定位置。从而在输送线上就可以对货箱的位置进行校正,执行机构只执行夹持和位置移动的功能,可靠性更高。
技术特征:1.一种工业机器人激光测距装置,其特征在于,
2.如权利要求1所述的一种工业机器人激光测距装置,其特征在于,
3.如权利要求2所述的一种工业机器人激光测距装置,其特征在于,
4.如权利要求3所述的一种工业机器人激光测距装置,其特征在于,
5.如权利要求4所述的一种工业机器人激光测距装置,其特征在于,
6.如权利要求5所述的一种工业机器人激光测距装置,其特征在于,
7.如权利要求6所述的一种工业机器人激光测距装置,其特征在于,
8.一种工业机器人激光测距方法,采用权利要求1~7任意一项所述的一种工业机器人激光测距装置,其特征在于,
技术总结本发明涉及物流技术领域,具体涉及一种工业机器人激光测距装置及方法,输送组件的货箱识别模块自动捕获并识别每个货箱的唯一标识和尺寸信息。校准器紧邻输送线本体设置,利用机械结构对进入输送线的货箱进行初步定位校正,确保后续处理的准确性。测距组件配备高精度激光测距传感器,精确测量校正后货箱两侧的距离差异。位置调节器依据测距组件提供的数据调整货箱位置,确保两侧距离的绝对均衡,避免堆放时产生偏斜或不稳定。堆放组件接收来自控制系统基于货箱信息的指令,精确控制物流机器人的动作路径与力度将货物堆放到预定位置。从而在输送线上就对货箱的位置进行校正,执行机构只执行夹持和位置移动的功能,可靠性更高。技术研发人员:甘鸽,邓安葆,陈宁,邓六学,朱俊伟受保护的技术使用者:重庆川宜机电设备有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/316619.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。