一种基于事件触发的非线性多智能体滑模容错控制方法
- 国知局
- 2024-10-21 14:38:56
本发明涉及多智能体系统,特别涉及一种基于事件触发的非线性多智能体滑模容错控制方法。
背景技术:
1、多智能体系统的探索在控制科学和工程领域引起了广泛关注。多智能体领域涵盖了广泛的实际应用,例如无人驾驶飞行器和协同控制问题。一致性控制在多智能体的协同控制中扮演着关键角色。一致性问题的目标是设计利用局部信息的控制器,同时考虑各种初始条件和网络拓扑约束,以确保所有智能体的状态收敛。在过去的十年中,已经取得了许多重要成果,包括无领导者一致性、领导-跟随一致性和多领导者一致性。一致性研究在机器人协同,无人机编队,移动传感器网络等多个工程领域都有所体现,具有重要的研究意义。
2、为了解决一致性问题,过去已经提出了许多分布式控制策略,包括自适应控制、滑模控制、预测控制、鲁棒h∞控制等。滑模控制策略因其对参数不确定性、非线性和外部扰动的鲁棒性而闻名,已被广泛研究并应用于各种动态系统。执行器作为控制系统的关键部件,在整个控制系统运行中不可避免的会发生多种故障。如果不能及时地对这些故障进行有效地处理与补偿,可能会导致系统性能降低甚至导致整个系统崩溃。如何提高系统的容错性已成为控制工程领域的一个重要的课题。因此,发明一种有效的容错控制方法来补偿故障对系统性能造成的影响具有重要工程应用价值。多智能体领域的研究重点大多集中在连续采样控制策略上。但是,这种方法可能会导致过度使用通信和计算资源,特别是在系统处于平衡状态且不受外部因素影响时。开发确保最佳性能的同时最少化资源使用的控制策略至关重要。为了解决过度采样的问题,一种潜在的解决方案是采用基于事件的控制技术,事件触发控制与传统的基于时间的采样不同,它仅在必要时才在各智能体之间进行通信。这种有选择的通信不仅减轻了通信资源的负担,而且还防止了其他资源的不必要消耗。因此有必要提出一种既能保证系统有限时间稳定,又尽可能的减少控制律更新频率,还能对系统外部扰动和执行器故障具有强鲁棒性的控制技术。
3、需要注意的是,本部分旨在为权利要求书中陈述的本发明的实施方式提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现思路
1、针对上述研究背景,本发明提供了一种基于事件触发的非线性多智能体滑模容错控制方法,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
2、本发明实施提供一种基于事件触发的非线性多智能体滑模容错控制方法,该方法包括以下步骤:
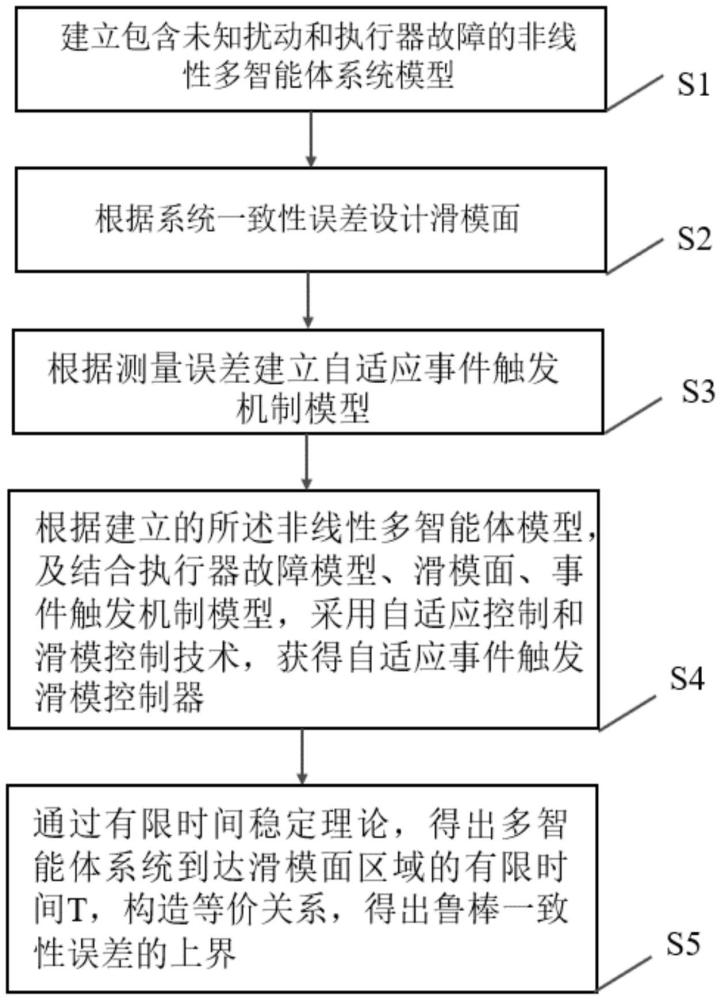
3、步骤s1:建立包含未知扰动和执行器故障的非线性多智能体系统模型;
4、步骤s2:根据系统一致性误差设计滑模面;
5、步骤s3:根据测量误差建立自适应事件触发机制模型;
6、步骤s4:根据建立的所述非线性多智能体模型,及结合所述执行器故障模型、所述滑模面、所述事件触发机制模型,采用自适应控制和滑模控制技术,获得自适应事件触发滑模控制器;
7、步骤s5:通过有限时间稳定理论,得出多智能体系统到达滑模面区域的有限时间t,构造等价关系,得出鲁棒一致性误差的上界。
8、本发明方案的进一步改进在于:所述步骤s1的实现过程为:
9、步骤s1.1:确定领导者的动力学模型如(1)所示:
10、
11、其中x0(t),v0(t)分别表示领导者的位置状态变量和速度状态变量,u0(t)表示控制输入。
12、步骤s1.2:确定带有未知扰动和执行器故障的跟随者动力学模型如(2)所示:
13、
14、其中xi(t),vi(t)分别表示第i个智能体的位置状态变量和速度变量,fi(xi(t),νi(t),t),,di(xi(t),νi(t),t)表示系统的非线性函数和未知外部扰动,示系统的控制输入。
15、步骤s1.3:针对固有非线性和未知外部扰动进行假设:
16、
17、其中h1和h2为非负数,为未知常数。
18、步骤s1.4:在不失去一般性的情况下,假定领导者没有执行器故障。本文将智能体i中的时变执行器失效模型描述为:
19、
20、其中ωi(t)表示执行器的故障程度,满足其中ωi和是已知参数。ri(t)表示第i个智能体的有偏故障严重程度,假设它是有界的,并且满足
21、本发明方案的进一步改进在于:所述步骤s2的实现过程为:
22、步骤s2.1:定义一致性跟踪位置误差变量e1i和一致性跟踪速度误差变量e2i,形式如下:
23、
24、为方便表述,给出如下定义:
25、其中,是跟随者和领导者之间的位置误差的向量集合,是跟随者和领导者之间的速度误差的向量集合,e1是一致性跟踪位置误差变量e1i(t)的向量集合,e2是一致性跟踪速度误差变量e2i(t)的向量集合,则一致性误差(4)的紧凑形式如下:
26、
27、其中in表示n维的单位矩阵。
28、通过计算,一致性误差的动力学方程可以描述为:
29、
30、步骤s2.2:设计滑模面函数如下所示:
31、
32、滑模面函数(7)可以表示为以下紧凑形式:
33、
34、其中
35、利用上述向量幂的定义,可以得到如下导数:
36、
37、为了方便表示,令
38、将(4)和(9)代入(7)的导数中,得到以下结果:
39、
40、本发明方案的进一步改进在于:所述步骤s3的实现过程为:
41、步骤s3.1:由事件触发机制引起的测量误差定义为:
42、
43、其中
44、步骤s3.2:构造一个自适应事件触发条件:
45、θi(t)=||δi(t)||-εi, (12)
46、其中εi满足=||l+b||||(l+b)-1||,χi是正数,并且满足当θi(t)>0时,智能体i对其状态进行采样,然后将状态发送给邻居,并且智能体i的控制输入在该触发时刻及其邻居触发时刻被更新。
47、当满足条件||δi(t)||>εi时,将更新控制器输入值。较小的常数εi有利于将系统状态传输给控制器,从而实现更快的更新。相反,较大的常数εi会阻碍系统状态与控制器之间的有效通信,导致控制器更新频率降低。此外,标量γ1i受到εi参数的影响,反过来会改变方程(12)中所述自适应事件触发滑模控制器的振荡幅度。
48、本发明方案的进一步改进在于:所述步骤s4的实现过程为:
49、步骤s4:设计了多智能体系统(1)和(2)的自适应事件触发滑模控制协议:
50、
51、其中γ1i>0,γ2i>0,表示第i个智能体的最后更新时间。未知外部扰动的自适应律设计如下:
52、
53、滑模控制协议的紧凑形式改写如下:
54、
55、其中η(t)=[η1(t),η2(t),...,ηn(t)]t,γ1=diag{γ11,γ12,...,γ1n},γ2=diag{γ21,γ22,...,γ2n}。
56、(15)中设计的事件触发滑模控制器包括两个部分,即切换控制部分以及线性控制部分首先,线性控制协议将系统的状态保持在设计的滑动面上;其次切换控制协议强制系统状态在预先设计的滑动面上滑动。
57、本发明方案的进一步改进在于:所述步骤s5的实现过程为:
58、步骤s5.1:选取lyapunov函数对此函数进行求导计算,并结合有限时间稳定理论,可以得出多智能体系统状态在有限时间t内被驱动到滑模面区域,有限时间t满足
59、
60、步骤s5.2:在非线性mass的位置和速度都被驱动到滑模区域的情况下,这意味着可以构造等价关系si(t)=κmi,结合滑模函数则可以得到滑模动态:
61、选取lyapunov函数根据lyapunov稳定性理论的原理,一致性误差将保持有界并满足由于位置一致性误差是有界的,根据上述可得速度的一致性误差也是有界的,并且速度的一致性误差满足这意味着验证了连续时间非线性领导者-跟随多智能体系统的自适应跟踪性能,并且还验证了速度和位置的一致性误差的有界性。
62、本发明的有益效果是:针对存在未知扰动和执行器故障的非线性多智能体系统,设计了一种基于事件触发的非线性多智能体滑模容错控制方法。利用执行器故障率和事件触发阈值的信息,构造了一种自适应基于事件触发滑模容错控制器,以确保多智能体的鲁棒一致性。设计了自适应事件触发机制,以优化在不同条件下的性能,从而减少执行器磨损和过度使用网络资源。通过运用lyapunov稳定性理论,给出了领导者跟随非线性多智能体自适应跟踪性能的充分条件。通过构造等价关系,还提供了鲁棒一致性误差的上界。总体而言,本发明具有如下优点:
63、(1)提出了一种基于自适应事件触发滑模容错控制器,以确保非线性多智能体的鲁棒一致性。该控制器通过结合具有上下界信息的时变执行器故障率和事件触发阈值来设计。即使存在执行器故障、未知扰动和固有非线性动态,该发明也能有效地解决这些挑战。(2)即使在考虑了执行器故障、系统非线性、网络传输负载和未知外部干扰等因素的情况下,该发明中涉及的滑模控制器结构仍然简单易于实现。此外,还给出了一个等价关系来确定鲁棒一致误差的上界。
64、(3)该发明所使用的算法能够通过计算非线性多智能体中触发事件动作的最小执行时间,确保防止zeno行为的发生。此外,还可以消除滑模控制律的抖振现象。
65、本发明所提出的基于事件触发的多智能体滑模容错控制方法,具有一定的应用意义,可应用于一类具有未知扰动和执行器故障的非线性多智能体的一致性实现问题。
本文地址:https://www.jishuxx.com/zhuanli/20241021/318838.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表