一种电机运动系统的分数阶前馈控制器设计方法
- 国知局
- 2024-10-21 14:27:25
本申请涉及前馈控制器设计,尤其涉及一种电机运动系统的分数阶前馈控制器设计方法。
背景技术:
1、反馈控制器,如pid控制器(比例-积分-微分控制器)由比例单元p、积分单元i和微分单元d组成,能实现比例控制、积分控制和微分控制三种控制方法的单独或组合使用。pid控制器具有控制方法灵活、参数易于调整、控制效果良好等优点,使得其成为工业控制中最常用的一种控制器,但是,反馈控制器的时延特性使得其无法满足高跟随精度性能工作场合。前馈控制器与上述反馈控制器相比,可以避免系统信号采集时的时滞效应,具有更优异的响应性能,能够改进系统信号跟随性能。前馈控制器参数设计的准确性尤为重要,且对于不同的系统,具备其独特的结构及参数,这为前馈控制器的设计带来许多麻烦。所以亟需一种电机运动系统的分数阶前馈控制器设计方法来解决上述存在的问题。
技术实现思路
1、本发明的目的在于提出一种电机运动系统的分数阶前馈控制器设计方法,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、一种电机系统的分数阶前馈控制器设计方法,所述方法包括以下步骤:
3、s100:获取前馈控制器信号与电机系统信号;
4、s200:通过前馈控制器信号与电机系统信号对电机系统进行误差计算;
5、s300:选取发出信号参数;
6、s400:通过参数结合误差对误差进行修正运算;
7、s500:通过评价函数得到设计评分。
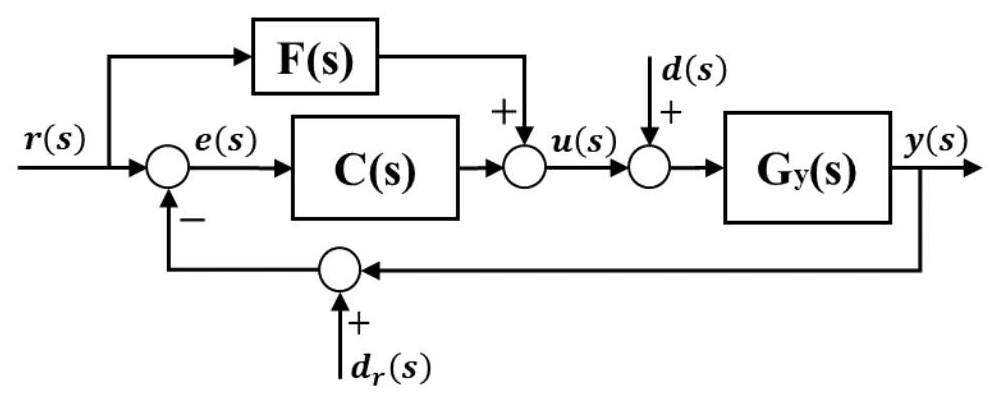
8、进一步地,所述分数阶前馈控制器设计方法基于系统,所述系统包括:反馈控制器,电机系统,前馈控制器,通过输入信号输入前馈控制器,输入信号通过系统跟随误差校正输入反馈控制器中,通过前馈控制器与反馈控制器输出电压控制信号,通过电压控制信号输入电机系统中,电机系统输出电机反馈信号于反馈控制器,并在电压控制信号输出与电机反馈信号输出时会伴随噪声信号输入,并将所述噪声信号输入带入系统跟随误差中。
9、进一步地,在步骤s100中,所述前馈控制器具体表示为:分数阶前馈控制器包含了整数阶前馈控制器,根据前馈控制器设计准确得到整数阶前馈控制器结构,并将整数阶前馈控制器结构表示为(s),所述(s)表示为整数阶前馈控制器结构输出信号:
10、(s)=(s)=++……+;
11、其中,k为整数阶前馈控制器参数,所述参数为整数阶前馈控制器输入信号,n表示为整数阶前馈控制器参数的总数量,k=1,2,…,n,(s)表示为电机系统产生输入信号,m表示为前馈控制器的总数量,在前馈控制器中输出信号(s)与电机系统产生输入信号(s)相等。
12、进一步地,在步骤s200中,计算整数阶前馈控制器与被控对象所需控制频域特性在增益特性(j)及相位特性上的误差(j):
13、(j)=20-20=;
14、其中,j表示被控对象,()表示为以10为底的对数函数,表示为所述被控对象对应的电机系统输出信号,表示为所述被控对象对应的整数阶前馈控制器输入信号,对应的输入信号控制电机的输入信号,所述被控对象与前馈控制器不同,所以被控对象输出信号与对应的输入信号控制电机的输入信号对数差值即为增益特性(j);
15、(j)=arg()-arg()=arg();
16、其中,arg()表示为复变函数,所述相位特性上的误差(j)根据输入信号与输出信号的复变函数差值计算获得。
17、进一步地,在步骤s300与步骤s400中,分数阶前馈-反馈二自由度控制系统框图,分数阶前馈控制器由整数阶前馈控制器结合分数阶补偿器设计得到,其表达式为:(s)=(s)(s);
18、其中,(s)为等阶分数阶补偿器传递函数,等阶分数阶补偿器传递函数(s)的计算公式为:
19、(s)=;
20、;
21、其中,为计算等阶分数阶补偿器信号变化,x表示为分数阶积分算子,拉姆达表示为等阶分数阶补偿器的传递信号量,a表示为分数阶微积分的阶次,参数x、λ下标与a上标表示为等阶分数阶补偿器的序号,p为信号转化系数,p为常数值,n为等阶分数阶补偿器总数量,所述为第i部等阶分数阶补偿器的信号变化;
22、计算选取参数值:
23、××……;
24、计算分数阶前馈控制器在增益特性及相位特性上的误差为:
25、;
26、;
27、其中,为被控对象输出信号与对应的输入信号控制电机的输入信号积的绝对值;
28、根据计算得到评价函数j,j=+,判断j是否取最小值,若j为最小值,则输出j,若j不为最小值,则返回选取参数计算。
29、本发明的有益效果为:通过获取电机运动系统模型信息的基础上,利用二自由度前馈-反馈控制结构进行分数阶前馈控制器设计。分数阶前馈控制器能够弥补整数阶前馈控制器在对电机运动系统所需理想控制频域特性表达时存在的增益误差、相位误差,所以,分数阶前馈控制器具备更好的响应性能,保证电机运动系统的信号跟随误差抑制能力。所述方法可以适配多种多轴数控机床以及多自由度机械臂等运动系统中的电机控制。
技术特征:1.一种电机系统的分数阶前馈控制器设计方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种电机系统的分数阶前馈控制器设计方法,其特征在于,所述分数阶前馈控制器设计方法基于系统,所述系统包括:反馈控制器,电机系统,前馈控制器,通过输入信号输入前馈控制器,输入信号通过系统跟随误差校正输入反馈控制器中,通过前馈控制器与反馈控制器输出电压控制信号,通过电压控制信号输入电机系统中,电机系统输出电机反馈信号于反馈控制器,并在电压控制信号输出与电机反馈信号输出时会伴随噪声信号输入,并将所述噪声信号输入带入系统跟随误差中。
3.根据权利要求1所述的一种电机系统的分数阶前馈控制器设计方法,其特征在于,在步骤s100中,所述前馈控制器具体表示为:分数阶前馈控制器包含了整数阶前馈控制器,根据前馈控制器设计准确得到整数阶前馈控制器结构,并将整数阶前馈控制器结构表示为(s),所述(s)表示为整数阶前馈控制器结构输出信号:
4.根据权利要求1所述的一种电机系统的分数阶前馈控制器设计方法,其特征在于,在步骤s200中,计算整数阶前馈控制器与被控对象所需控制频域特性在增益特性(j)及相位特性上的误差(j):
5.根据权利要求1所述的一种电机系统的分数阶前馈控制器设计方法,其特征在于,在步骤s300与步骤s400中,分数阶前馈-反馈二自由度控制系统框图,分数阶前馈控制器由整数阶前馈控制器结合分数阶补偿器设计得到,其表达式为:(s)=(s)(s);
技术总结本发明公开了一种电机系统的分数阶前馈控制器设计方法,其原理是在对电机运动系统进行准确建模及系统辨识前提下,根据二自由度前馈‑反馈控制结构推导获取分数阶前馈控制器参数,以建立更具运动系统所需控制频域特性要求的前馈控制器,提高控制系统的响应性能。分数阶前馈控制器能够弥补整数阶前馈控制器在对电机运动系统所需理想控制频域特性表达时存在的增益误差、相位误差,所以,分数阶前馈控制器具备更好的响应性能,保证电机运动系统的信号跟随误差抑制能力。本专利适用于多轴数控机床以及多自由度机械臂等运动系统中的电机控制。技术研发人员:钟永彬,阳佳琦,柯金龙,高健,张揽宇,刘亚超受保护的技术使用者:广东工业大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/318223.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表