一种住宅项目的悬挂式机器人施工系统的制作方法
- 国知局
- 2024-10-21 14:48:12
本发明涉及建筑施工,具体涉及一种住宅项目的悬挂式机器人施工系统。
背景技术:
1、随着人们对居住环境和建筑功能需求的日益增加,住宅项目的结构布局变得愈发复杂。楼层设计往往融合了多样化的功能区域,存在反坎、降板等复杂结构,使得施工难度大大增加。同时,住宅项目的施工面积也在不断扩大,需要处理的工作量随之激增。在这样的背景下,传统的人工作业方式已经难以满足施工需求。首先,人工作业劳动强度大,长时间的重体力劳动不仅容易导致工人疲劳,还可能影响施工质量和安全。其次,施工效率低下,人工操作难以保证施工速度的稳定性和连续性。此外,人工施工还需要大量的人力资源投入,这不仅增加了企业的用工成本,还可能面临用工荒等问题。
2、建筑行业开始逐渐采用智能施工装备来代替人工施工。智能施工装备具有高度的自动化和智能化水平,降低了用工量和工人劳动强度。
3、目前的智能施工装备主要为地面行走式,其自身重量直接作用于作业面上。采用智能施工装备进行施工时,由于现有装备重量较大,在作业面上行走会导致钢筋压弯、模板破碎等质量和安全问题。
4、同时由于住宅项目施工面存在反坎、降板等复杂结构,地面行走式的智能施工装备行走受限,施工效率低。
技术实现思路
1、针对于现有智能施工装备存在上述技术问题,本发明的目的在于提供一种住宅项目的悬挂式机器人施工系统,通过采用悬挂式机器人,其能够悬挂在作业面上方进行施工,避免了装备自重对作业面的损伤,并且通过移动可升降基座的升降可以使得悬挂式施工机器人顺利通过作业面上的反坎、降板等位置,保证施工连续性。
2、为了达到上述目的,本发明提供的住宅项目的悬挂式机器人施工系统,包括若干轨道梁,若干移动单元,若干移动可升降基座,若干悬挂式施工机器人,所述若干轨道梁沿水平第一方向依次排布连接在顶升平台中贝雷梁组的底部并覆盖工作面,所述若干移动单元分别连接在轨道梁上并且可沿轨道梁在水平第二方向进行移动,所述若干移动可升降基座分别连接在移动单元上并且可沿移动单元在水平第一方向进行移动,若干悬挂式施工机器人分别连接在移动可升降基座上,并且通过移动可升降基座的升降能够带动悬挂式施工机器人进行竖向移动,悬挂式施工机器人能够悬挂在工作面的上方并对工作面进行施工,相邻的两个轨道梁上的移动单元通过移动能够彼此对接,通过对接可供连接在其中一个移动单元上的移动可升降基座能够移动至与其对接的移动单元上。
3、进一步地,所述轨道梁由两条平行的钢轨组成,用于承载移动单元。
4、进一步地,所述移动单元为桁车,其包括两个移动小车以及桁车轨道,所述两个移动小车相对设置并且分别可移动的设置在轨道梁的两个钢轨上,所述桁车轨道设置在两个移动小车之间,两端分别与移动小车连接,桁车轨道用于承载移动可升降基座。
5、进一步地,所述相邻的两个轨道梁上的移动单元沿着轨道梁进行移动至对齐时,两个移动单元中的桁车轨道能够对轨,以使得可移动连接在桁车轨道上的移动可升降基座能够在两个对轨的桁车轨道上来回移动。
6、进一步地,所述移动可升降基座包括第二移动小车,升降模组,所述第二移动小车可移动的设置在移动单元的桁车轨道上,所述升降模组一端与第二移动小车固定连接,另一端与悬挂式施工机器人连接。
7、进一步地,所述悬挂式施工机器人为悬挂式振捣机器人、悬挂式整平机器人、悬挂式覆膜机器人或悬挂式凿毛机器人。
8、相对于现有技术,本发明提供的住宅项目的悬挂式机器人施工系统具备如下有益效果:
9、(1)施工机器人悬挂式作业,避免了机器自重荷载对作业面的损伤,提高施工质量;
10、(2)悬挂式施工机器人可调整高度,作业面上的反坎、降板等结构不会影响施工连续性,提高施工效率。
11、附图说明
12、以下结合附图和具体实施方式来进一步说明本发明。
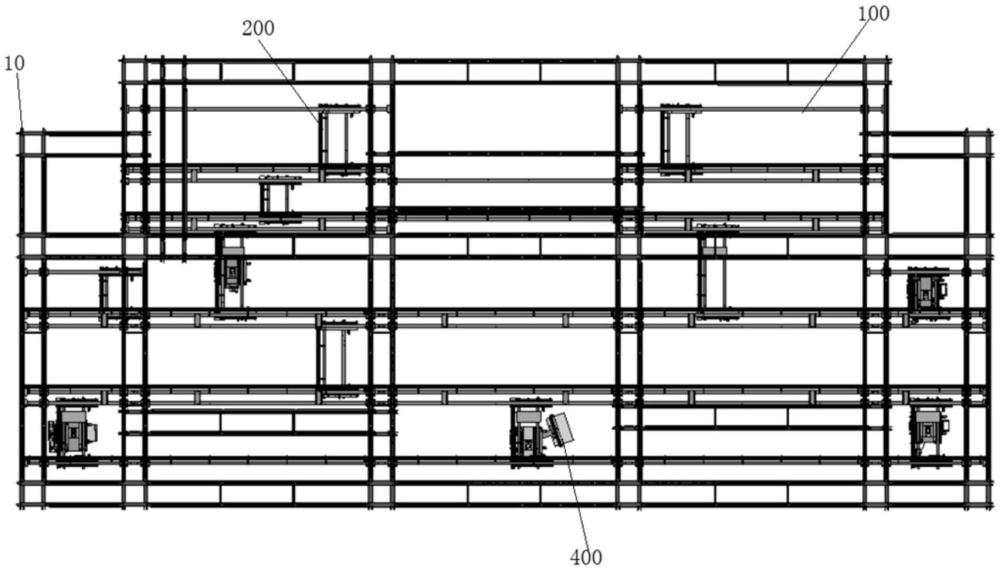
13、图1为本发明提供的住宅项目的悬挂式机器人施工系统的整体结构示意图;
14、图2为本发明提供的住宅项目的悬挂式机器人施工系统中移动单元的结构示意图;
15、图3为本发明提供的住宅项目的悬挂式机器人施工系统中移动可升降基座的结构示意图。
技术特征:1.一种住宅项目的悬挂式机器人施工系统,其特征在于,包括若干轨道梁,若干移动单元,若干移动可升降基座,若干悬挂式施工机器人,所述若干轨道梁沿水平第一方向依次排布连接在顶升平台中贝雷梁组的底部并覆盖工作面,所述若干移动单元分别连接在轨道梁上并且可沿轨道梁在水平第二方向进行移动,所述若干移动可升降基座分别连接在移动单元上并且可沿移动单元在水平第一方向进行移动,若干悬挂式施工机器人分别连接在移动可升降基座上,并且通过移动可升降基座的升降能够带动悬挂式施工机器人进行竖向移动,悬挂式施工机器人能够悬挂在工作面的上方并对工作面进行施工,相邻的两个轨道梁上的移动单元通过移动能够彼此对接,通过对接可供连接在其中一个移动单元上的移动可升降基座能够移动至与其对接的移动单元上。
2.根据权利要求1所述的住宅项目的悬挂式机器人施工系统,其特征在于,所述轨道梁由两条平行的钢轨组成,用于承载移动单元。
3.根据权利要求2所述的住宅项目的悬挂式机器人施工系统,其特征在于,所述移动单元为桁车,其包括两个移动小车以及桁车轨道,所述两个移动小车相对设置并且分别可移动的设置在轨道梁的两个钢轨上,所述桁车轨道设置在两个移动小车之间,两端分别与移动小车连接,桁车轨道用于承载移动可升降基座。
4.根据权利要求3所述的住宅项目的悬挂式机器人施工系统,其特征在于,所述相邻的两个轨道梁上的移动单元沿着轨道梁进行移动至对齐时,两个移动单元中的桁车轨道能够对轨,以使得可移动连接在桁车轨道上的移动可升降基座能够在两个对轨的桁车轨道上来回移动。
5.根据权利要求3所述的住宅项目的悬挂式机器人施工系统,其特征在于,所述移动可升降基座包括第二移动小车,升降模组,所述第二移动小车可移动的设置在移动单元的桁车轨道上,所述升降模组一端与第二移动小车固定连接,另一端与悬挂式施工机器人连接。
6.根据权利要求1所述的住宅项目的悬挂式机器人施工系统,其特征在于,所述悬挂式施工机器人为悬挂式振捣机器人、悬挂式整平机器人、悬挂式覆膜机器人或悬挂式凿毛机器人。
技术总结本发明公开了一种住宅项目的悬挂式机器人施工系统,包括轨道梁,移动单元,移动可升降基座,悬挂式施工机器人,若干轨道梁沿水平第一方向依次排布连接在顶升平台底部,若干移动单元分别连接在轨道梁上并且可沿轨道梁在水平第二方向进行移动,若干移动可升降基座分别连接在移动单元上并且可沿移动单元在水平第一方向进行移动,若干悬挂式施工机器人分别连接在移动可升降基座上,通过移动可升降基座的升降能够带动悬挂式施工机器人进行竖向移动,相邻的两个轨道梁上的移动单元通过移动能够彼此对接,通过对接可供移动可升降基座能够移动至与其对接的移动单元上,通过采用悬挂式机器人悬挂在作业面上方进行施工,避免了装备自重对作业面的损伤。技术研发人员:亓立刚,马明磊,阴光华,马昕煦,于科,黄运昌,柳成林,王修军,贾鹏,包新宇,祁明顺,王康受保护的技术使用者:中国建筑第八工程局有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/319340.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。