一种基于神经网络的质子交换膜燃料电池温度控制方法与流程
- 国知局
- 2024-10-21 15:03:55
本发明涉及燃料电池温度控制,具体为一种基于神经网络的质子交换膜燃料电池温度控制方法。
背景技术:
1、随着科技的发展,日益严重的环境问题和能源危机也在不断凸显,为保护人类的生存环境和解决能源问题,有关清洁能源替代传统化石能源的技术也在不断发展。质子交换膜燃料电池是一种高效的能源转换设备,它通过电化学反应将氢气和氧气转换为电能,其副产品仅为水,非常环保。然而,为了确保质子交换膜燃料电池系统的最佳性能和长期稳定性,温度控制是一个关键的技术挑战。
2、在质子交换膜燃料电池中进行的化学反应会产生大量热量,电堆的温度直接影响着电池的性能和寿命,如果这些热量不能有效地管理和排出,会导致燃料电池的温度升高,从而影响到质子交换膜的离子传导性能和燃料电池的整体效率。温度控制旨在使电堆处于适宜的工作温度范围内,通常在70℃至90℃之间,在这一范围内,膜电极组件能够实现最佳的离子传输速率和催化活性,从而提高转换效率和响应速度。因此,有效的温度控制成为确保质子交换膜燃料电池稳定运行的关键因素之一。
3、为解决质子交换膜燃料电池产热变化时的温度控制问题,本发明提出了一种基于神经网络的质子交换膜燃料电池温度控制方法。该方法旨在有效提高电池的效率并延长其使用寿命,从而实现对于设定温度的稳定跟踪,提高系统的快速相应能力和鲁棒性。
技术实现思路
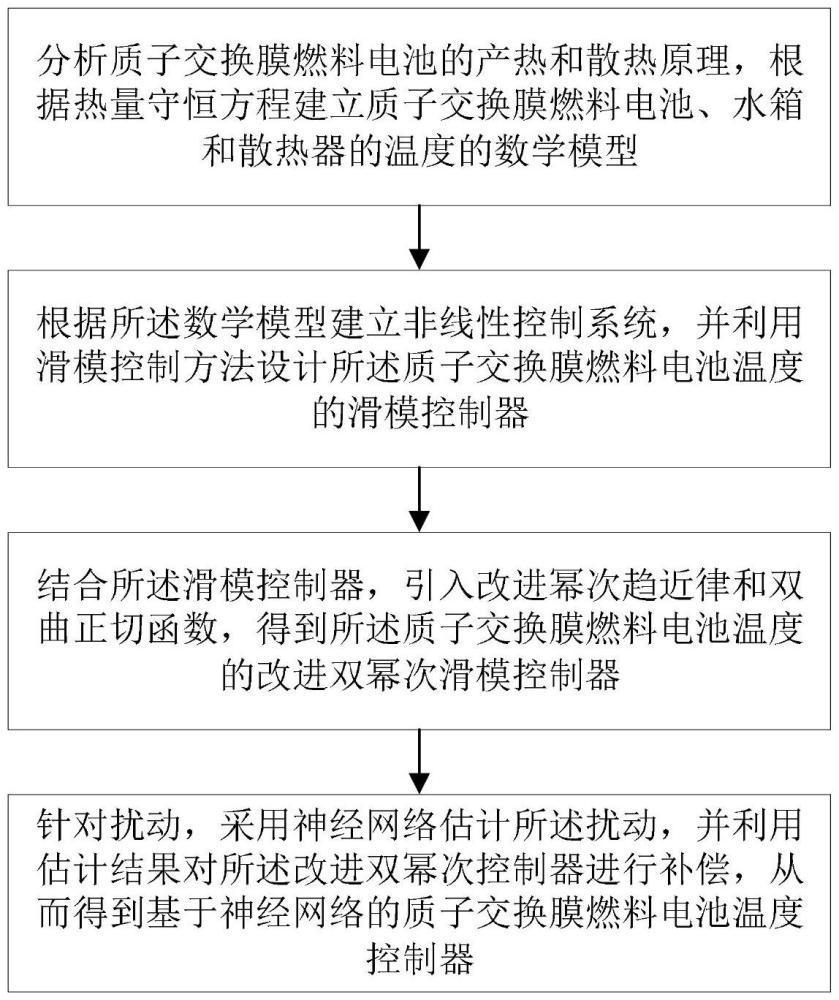
1、本发明提供一种基于神经网络的质子交换膜燃料电池温度控制方法,用于解决上述技术问题。首先,分析质子交换膜燃料电池的产热和散热原理,根据热量守恒方程建立质子交换膜燃料电池、水箱和散热器的温度的数学模型;其次,根据所述数学模型建立相关非线性控制系统,利用滑模控制方法设计电池温度的滑模控制器;然后,结合所述滑模控制器,引入改进幂次趋近律和双曲正切函数,得到质子交换膜燃料电池温度的改进双幂次滑模控制器;最后,针对扰动,采用神经网络估计扰动,并利用估计结果对所述改进双幂次控制器进行补偿,从而得到基于神经网络的质子交换膜燃料电池温度控制器。
2、一种基于神经网络的质子交换膜燃料电池温度控制方法,包含以下步骤:
3、s1、分析质子交换膜燃料电池的产热和散热原理,根据热量守恒方程建立质子交换膜燃料电池、水箱和散热器的温度的数学模型;
4、s2、根据所述数学模型建立非线性控制系统,并利用滑模控制方法设计所述质子交换膜燃料电池温度的滑模控制器;
5、s3、结合所述滑模控制器,引入改进幂次趋近律和双曲正切函数,得到所述质子交换膜燃料电池温度的改进双幂次滑模控制器;
6、s4、针对扰动,采用神经网络估计所述扰动,并利用估计结果对所述改进双幂次控制器进行补偿,从而得到基于神经网络的质子交换膜燃料电池温度控制器。
7、进一步的,根据热量守恒方程建立质子交换膜燃料电池的温度的数学模型,具体公式为:
8、
9、其中,cst表示质子交换膜燃料电池电堆的比热容,mst为电池电堆的质量,tst为电池电堆的温度,qst为电堆电化学反应产生的热量,pst表示电堆的负载功率,qc为冷却液散热的热功率,qrad为电堆热辐射的功率;
10、其中qst、pst、qc和qrad分别表示为:
11、
12、pst=nufcist;
13、qc=qw+qsr;
14、qrad=ksts(tst-t0+d);
15、其中,n为燃料电池电堆中单片电池的数量,δh为电堆电化学反应的焓变,ist为电池电堆的负载电流,f为法拉第常数;ufc为燃料电池电堆中单片电池的电压;qw为水箱散热功率,qsr为散热器散热功率;kst为燃料电池电堆与环境的热交换系数,s为燃料电池单体面积,t0为环境的温度,d为扰动。
16、进一步的,建立水箱和散热器的温度的数学模型,具体公式为:
17、qw=cwww(tst-tw+d)-kwsw(tw-t0);
18、qsr=cwww(tw-tsr)-cairwair(tsr-t0);
19、其中,qw为水箱散热功率,qsr为散热器散热功率;cw为水箱冷却液的比热容,ww为冷却液流量,tst为电池电堆的温度,tw为水箱的温度,t0为环境的温度,d为扰动,kw为水箱与环境的热交换系数,sw为水箱面积;tsr为散热器的温度,cair为空气的比热容,wair为空气的流量。
20、进一步的,根据所述数学模型建立非线性控制系统,具体公式为:
21、
22、其中,x(t)为电池电堆温度tst,是状态变量,t为时间,为x(t)的一阶导数,u(t)为冷却液流量ww,是控制变量,ai,i=1,2,…7为所述非线性控制系统的系数,所述非线性控制系统中各个系数的具体公式为:
23、
24、其中,cst为所述电池电堆的比热容,mst为电池电堆的质量,n为燃料电池电堆中单片电池的数量,δh为电堆电化学反应的焓变,ist为电池电堆的负载电流,f为法拉第常数,ufc为燃料电池电堆中单片电池的电压;cw为水箱冷却液的比热容;tsr为散热器的温度,d为扰动;kw为水箱与环境的热交换系数,sw为水箱面积,tw为水箱的温度,t0为环境的温度;cair为空气的比热容,wair为空气的流量;kst为燃料电池电堆与环境的热交换系数,s为燃料电池单体面积。
25、进一步的,根据所述数学模型建立非线性控制系统,并利用滑模控制方法设计所述质子交换膜燃料电池温度的滑模控制器,所述滑模控制器的获取过程为:
26、定义系统误差e(t)为:
27、e(t)=x(t)-xd(t);
28、其中e(t)为系统误差,xd(t)为期望温度;
29、设计滑模面s为:
30、s=ce(t);
31、
32、其中s为滑模面,c为滑模面系数,为正常数,为s的一阶导数;
33、可得到:
34、
35、代入非线性控制系统有:
36、
37、则所述滑模控制器的具体公式为:
38、
39、其中,u(t)为控制变量,x(t)为状态变量,ai,i=1,2,…7为所述非线性控制系统的系数。
40、进一步的,所述s3中,引入所述改进幂次趋近律和双曲正切函数,得到质子交换膜燃料电池温度的改进双幂次滑模控制器;具体为:
41、幂次趋近律公式为:
42、
43、其中,k1,k2,α为所述幂次趋近律系数,k1,k2>0,0<α<1,s为滑模面,sgn(s)为符号函数,具体为:
44、
45、引入连续光滑的双曲正切函数替代符号函数,所述改进幂次趋近律为:
46、
47、其中tanh(s)为双曲正切函数;
48、结合所述滑模控制器,得到所述质子交换膜燃料电池温度的改进双幂次滑模控制器为:
49、
50、其中,u(t)为控制变量,x(t)为状态变量,c为滑模面系数,ai,i=1,2,…7为所述非线性控制系统的系数。
51、进一步的,引入所述改进幂次趋近律和双曲正切函数,建立质子交换膜燃料电池温度的改进双幂次滑模控制器,所述改进双幂次滑模控制器的获取过程为:
52、幂次趋近律具体公式为:
53、
54、其中,k1,k2,α为所述幂次趋近律系数,k1,k2>0,0<α<1,s为滑模面,sgn(s)为符号函数,具体公式为:
55、
56、引入连续光滑的双曲正切函数替代符号函数,所述改进幂次趋近律具体公式为:
57、
58、其中,tanh(s)为双曲正切函数;
59、结合所述滑模控制器,得到所述改进双幂次滑模控制器,具体公式为:
60、
61、其中,u(t)为控制变量,x(t)为状态变量,c为滑模面系数,ai,i=1,2,…7为所述非线性控制系统的系数。
62、进一步的,由于所述神经网络的逼近特性,采用所述神经网络逼近外部干扰d,算法为:
63、
64、其中,d为所述扰动,wt为所述神经网络的理想权值,x为所述神经网络的输入,p(x)为所述神经网络的输出,ε(x)为所述神经网络的逼近误差;
65、p(x)选取高斯函数,公式为:
66、
67、其中,cj为高斯函数的中心值,bj为高斯函数的宽度;所述扰动估计值为:
68、
69、其中,为d的估计值,为的估计值;所述神经网络的自适应律设计为:
70、
71、其中,为的一阶导数,f1和f2为待设计的控制器参数,为正常数。
72、进一步的,将改进幂次趋近律的滑模控制器中的扰动项替换为所述扰动估计值,得到基于神经网络的质子交换膜燃料电池温度控制器,具体公式为:
73、
74、其中,u(t)为控制变量,x(t)为状态变量,c为滑模面系数,ai,i=1,4,5,6为所述非线性控制系统的系数;cst为所述电池电堆的比热容,mst为电池电堆的质量,cw为水箱冷却液的比热容,tsr为散热器的温度,t0为环境的温度,kst为燃料电池电堆与环境的热交换系数,s为燃料电池单体面积;wt为所述温度测量中神经网络的理想权值,为的估计值,p(x)为所述高斯函数;k1,k2,α为所述幂次趋近律系数,k1,k2>0,0<α<1,s为滑模面,tanh(s)为双曲正切函数。
75、与现有技术相比,本发明的有益效果为:
76、1、采用了滑模控制策略,不仅对非线性系统和不确定性系统都具有较好的控制效果,具有良好的鲁棒性,还对于模型参数的变化和扰动干扰具有很好的抵抗能力,在实际应用中的物理实现比较简单,降低了实现的复杂度和成本。
77、2、设计了一种改进幂次趋近律,可使当系统状态远离滑动模态时,能快速趋近于滑动模态,当系统状态接近滑动模态时,降低了抖振,可以获得更快的收敛速度,增加温度跟踪的响应速度,提升燃料电池温度控制的系统性能,对于滑模控制中普遍存在的抖振问题有较好的抑制效果;
78、3、针对温度测量时存在的扰动问题引入了神经网络,可以通过实时学习和动态调整控制策略,精确地估计外部干扰的影响,提升了系统对外部干扰的快速响应能力和适应性,减少了跟踪误差,实现对于期望温度的稳定跟踪,提高了系统的快速性和鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320361.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。