基于低压电磁驱动的多足爬壁微型机器人
- 国知局
- 2024-10-21 15:05:08
本发明涉及微型机器人,具体是一种基于低压电磁驱动的多足爬壁微型机器人。
背景技术:
1、航空发动机外场整机结构原位无损检测是保证飞机飞行安全、提高发动机服役寿命的重要措施,而现有检测技术如孔探等可达性差、检测精度低。微型爬壁机器人(<5cm)具有尺寸小、质量轻、可达性好等特点,凭借其厘米级的微型尺寸,能够自由进入狭小封闭空间开展信息采集与探测等任务,有望成为解决航空发动机现有检测技术精度低、可达性差的一种重要技术途径。
2、微型爬壁机器人尺寸的进一步微型化(<5cm)及其脱线运动是进入狭小复杂空间内开展信息采集任务的首要问题。在诸如航空发动机、燃气轮机等高附加值设备内部,由于传统检测设备为带线检测,故而具有视觉盲区,导致检测的可达性差。因此,现有微型爬壁机器人需要进一步缩小尺寸,以满足使用场景的需求。而尺寸缩小后,爬壁机器人的绝对承载能力将下降,从而导致机器人需要带着电源线及控制线运动,无法实现脱线运动。但是,机器人带线运动将大大限制其运动范围,且导线过长,将导致机器人工作时容易发生缠绕。因此,微型爬壁机器人尺寸的进一步微型化及其自带能源与控制的脱线运动是构型设计的关键。
3、目前,微型爬壁机器人实现壁面吸附爬行的主要技术途径分为两类:刚体爬壁机器人和软体爬壁机器人,但该两类技术途径都未实现自带能源与控制的脱线爬壁。对于刚体爬壁机器人,已有构型为采用工作电压高达几百伏的压电驱动器爬行,吸附则采用静电吸附原理设计静电吸盘,通过对八个高压驱动器控制实现交替爬行步态,最终实现壁面爬行运动。但由于驱动系统与静电吸附系统皆为高压电,故升压电路及控制电路太重而难以携带,导致无法实现脱线爬行。对于软体爬壁机器人,由于机身高挠度,已有构型为利用软体材料特性设计仿尺蠖爬行步态进行爬行运动,采用静电吸附原理设计静电吸盘实现壁面吸附效果,从而实现垂直壁面爬行运动,但是由于软体机器人机身刚性小,载荷加上后机器人机身变形严重,导致承载能力太差,故也无法自身携带能源与控制爬壁。因此,设计驱动电压低、承载能力大、易于系统集成的微型爬壁机器人对于微型机器人实现壁面脱线爬行具有重要意义。
技术实现思路
1、针对现有微型爬壁机器人驱动电压高、承载能力差从而导致机器人难以系统集成的技术问题,本发明提出了一种基于静电吸附的多足微型爬壁机器人,该机器人通过通电线圈与磁铁之间的相互作用力,利用低压电磁驱动原理,使爬行足实现两自由度灵活运动,优选的是对机器人爬行足进行爬行步态设计与静电吸盘设计,从而实现壁面爬行运动,相比采用高压驱动爬行、软体仿生方法实现带线沿壁面吸附爬行,本发明驱动电压低至1.2v,且承载能力较高,同时该方法易于系统集成,能够实现微型爬壁机器人自带能源与控制的脱线爬壁功能。
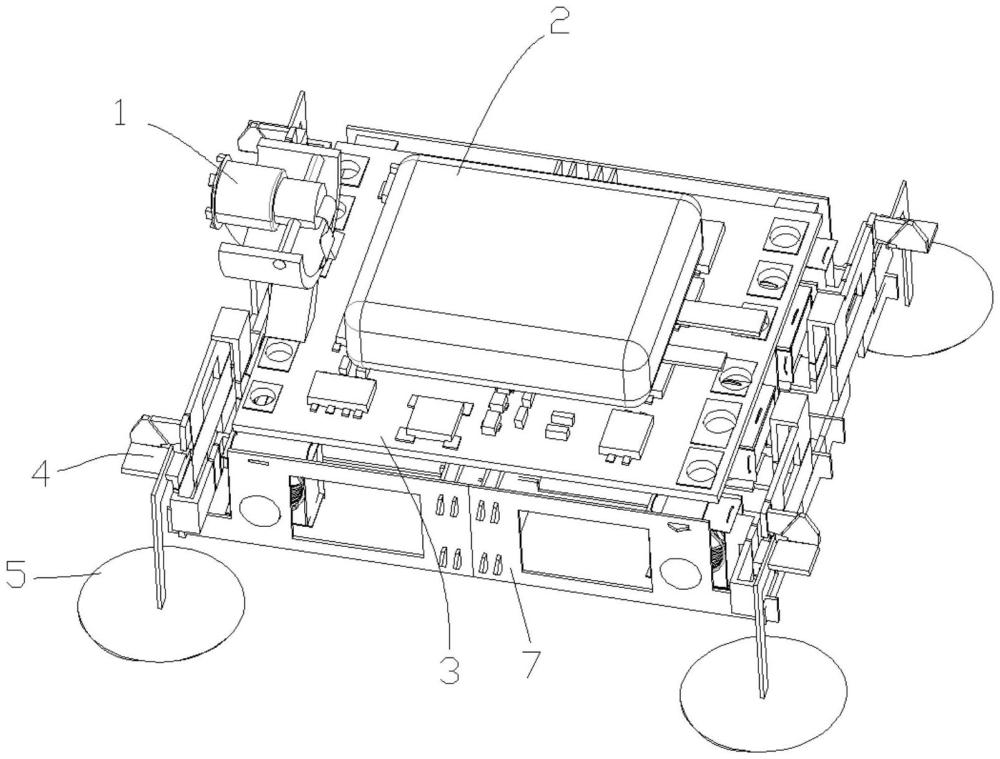
2、具体提出一种基于低压电磁驱动的多足爬壁微型机器人,包括:支撑框架及安装在支撑框架上的电路板、电磁悬臂梁驱动组件和多个两自由度腿;
3、电磁悬臂梁驱动组件包括悬臂梁,悬臂梁一端固定在支撑框架上,另一端固定永磁体或线圈且与两自由度腿输入端相连,所述的线圈与永磁体轴向同心放置,电路板通过电磁驱动器来控制电磁悬臂梁驱动组件,电磁悬臂梁驱动组件至少包括第一电磁悬臂梁驱动组件和第二电磁悬臂梁驱动组件;
4、两自由度腿包括由第一电磁悬臂梁驱动组件驱动的水平驱动组件和由第二电磁悬臂梁驱动组件驱动的垂直驱动组件,两自由度腿的腿部能够被水平驱动组件和垂直驱动组件分别驱动或共同驱动。
5、上述基于低压电磁驱动的多足爬壁微型机器人机器人驱动器为电磁驱动器,故仅需通入幅值低至1.2v的交流电即可驱动机器人运动,且低压信号产生通过单片机即可方便产生。
6、优选的是,电磁悬臂梁驱动组件还包括电磁屏蔽罩,电磁屏蔽罩将线圈半包围,其材料为包括电磁屏蔽效能的金属片材。
7、优选的是,两自由度腿还包括;静电吸盘,所述静电吸盘位于腿部的下端并与电路板电信号连接,通过控制静电吸盘上高压电的通断来控制静电吸盘的吸附力的产生和消失。具体的,静电吸盘为三层材料堆叠后键合而成,最外面两层为高介电常数的高分子薄膜材料,中间层为导电材料层。
8、优选的是,第一电磁悬臂梁驱动组件包括第一悬臂梁、第一永磁体、第一电磁屏蔽罩和线圈,其中第一悬臂梁的一端与第一电磁屏蔽罩固定而另一端固定在支撑框架上,第一永磁体固定在支撑框架上,水平驱动组件与第一电磁屏蔽罩传动连接;第二电磁悬臂梁驱动组件包括第二悬臂梁、第二永磁体、第二电磁屏蔽罩和线圈,其中第二悬臂梁的一端与第二永磁体固定而另一端固定在支撑框架上,第二电磁屏蔽罩固定在支撑框架上,垂直驱动组件与第二永磁体传动连接。
9、优选的是,水平驱动组件依次包括第一垂直铰接;第二垂直铰接;第三垂直铰接,其中第一垂直铰接靠近第二安装位,第二安装位与第一电磁屏蔽罩传动连接,第三垂直铰接靠近第一部件,腿部固定在第一部件上;垂直驱动组件依次包括第一水平铰接、第二水平铰接,第三水平铰接,其中第一水平铰接靠近第一安装位,第一安装位第一电磁屏蔽罩传动连接,第三水平铰接靠近第二部件;第一部件与第二部件通过联动块传动连接。
10、优选的是,水平驱动组件和/或垂直驱动组件包括可转动关节,可转动关节包括柔性铰链,柔性铰链是对多层复合材料经激光切割后形成。
11、优选的是,还包括电源给电路板供电,电路板通过调整电信号及其时序使输出的交流电信号流入线圈中产生变化的磁场,从而使线圈与永磁体之间产生电磁力作用,进而使悬臂梁末端产生强迫振动,该强迫振动驱动两自由度腿产生仿壁虎爬行步伐。
12、优选的是,还包括摄像头,摄像头与电路板相连,并放置于支撑框架上。
13、发明有益效果:
14、(1)机器人驱动器的驱动电压低,驱动信号生成简单。本发明中,机器人驱动器为电磁驱动器,故仅需通入幅值低至1.2v的交流电即可驱动机器人运动,且低压信号产生通过单片机即可方便产生。低压驱动显著降低了机器人系统的能耗;驱动信号的产生仅需通过单片机即可实现,极大地简化了控制系统的复杂性;而且,这种低电压、易生成的驱动信号方法提高了机器人的安全性和可靠性,使其更适合长时间工作和广泛应用。
15、(2)在本技术中,提出了使用四组两自由度腿,每一组两自由度腿由两个低压电磁驱动器驱动,其中一个电磁驱动器控制两自由度腿垂直摆动、另一个电磁驱动器控制两自由度腿水平摆动,将垂直摆动与水平摆动组合,则可以实现仿壁虎爬行步伐。
16、(3)该机器人使用了静电吸盘,吸附结构简单,易于系统集成。本发明中,吸附结构依据静电吸附原理,静电吸盘仅需通过聚酰亚胺薄膜-金属层-聚酰亚胺膜三层式结构实现,故设计简单,易于系统集成。
17、(4)该机器人系统集成度高,无需带电源线/控制线爬壁。本发明中,机器人集成了能源、控制、信息采集与吸附模块,有望实现自带能源与控制,进行信息采集工作。而且该机器人整机尺寸小,能自由进入狭小密闭空间检测,并适应复杂表面或真空环境,而且整机尺寸缩小至5cm以下,能够满足在发动机内部进行结构损伤检测任务的要求。
18、本发明的其他有益效果将在后面具体实施例中逐一描述。
本文地址:https://www.jishuxx.com/zhuanli/20241021/320445.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。