一种缓冲抗沉陷的仿生机械足的制作方法
- 国知局
- 2024-10-21 14:48:37
本发明涉及工程仿生,特别涉及一种缓冲抗沉陷的仿生机械足。
背景技术:
1、仿生机械足是仿生机械学的一个重要研究领域,它模仿生物的足部形态、结构和控制原理,设计制造出的具有生物特征的机械足,仿生机器人按照其移动方式可主要分为轮式机器人、履带式机器人、腿足式机器人等三大类。其中,仿生腿足式机器人以其较高的灵活性和适应性被广泛研究与应用,而与地面接触的机械足则是腿足式机器人适应上述不同场景的关键因素。
2、仿生腿足式机器人的机械足发展至今已具有多种形式,主要分为平面足、曲面足和球面足等,然而,此类机械足的结构与功能较为简单,更适合在硬地面上行走,而在沙地等松软介质表面的行走效果较差,容易出现下陷过深、打滑、出足困难、移动速度较慢等问题,尤其对于较为灵活的跳跃式机器人,由于其较大的落地冲击力,更容易出现上述问题,严重制约其在沙地等松软介质表面上的应用。
3、现有的装置在投入使用时无法保证其在沙地等松软介质表面上行走,并且仿生行走效果较差对能源过于浪费,以及在行走时不能够提升行走速率、稳定性以及无法在落地时进行缓冲的问题。
技术实现思路
1、为解决上述背景技术中提出的问题,本发明提供了一种缓冲抗沉陷的仿生机械足。
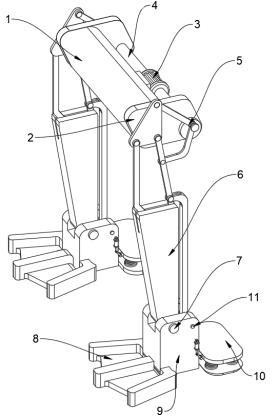
2、一种缓冲抗沉陷的仿生机械足,包括仿生臀骨,仿生臀骨的侧壁固定有第一连接板,仿生臀骨的侧壁固定有伺服电机,伺服电机的输出端固定有第一连接杆,第一连接杆的侧壁设置有行走机构;
3、所述的行走机构包括连接盘、第一固定柱和第一连杆,连接盘固定在第一连接杆的侧壁,连接盘的外壁固定有第一固定柱,第一固定柱的外壁套设有第一连杆,第一连杆的顶端铰接连接有三角转盘,第一连接板的外壁固定有第二固定柱,第二固定柱的外壁套设有三角转盘,第一固定柱的外壁套设有第二连杆,第二连杆的一端铰接连接有第三连杆,第三连杆的底端铰接连接有仿生腿骨,三角转盘的一端铰接连接有第四连杆,第四连杆的底端铰接连接有仿生腿骨,第三连杆的一端铰接连接有第五连杆,第五连杆的底端固定有第五连接杆。
4、优选地,所述的第一连接板设置有两组,第一连接板关于仿生臀骨的中轴线呈对称分布,连接盘设置有两组,连接盘关于第一连接杆的中轴线呈对称分布。
5、优选地,所述的第一连杆转动连接在第一固定柱的外壁,三角转盘转动连接在第二固定柱的外壁,第二连杆转动连接在第一固定柱的外壁,第三连杆的顶端转动连接在第二固定柱的外壁。
6、优选地,所述的第五连杆的底端固定有第五连接杆,第五连接杆的外壁套设有仿生足骨,仿生腿骨的底端固定有第二连接杆,第二连接杆的外壁套设有仿生足骨,仿生足骨的一端设置有防沉陷结构。
7、优选地,所述的防沉陷结构包括仿生趾骨、仿生足面和第一复位弹簧,仿生趾骨转动连接在仿生足骨的一端,仿生趾骨内壁设置有仿生足面,仿生趾骨的侧壁固定有第一复位弹簧。
8、优选地,所述的第一复位弹簧设置有两组,第一复位弹簧关于仿生趾骨的中轴线呈对称分布。
9、优选地,所述的第一复位弹簧用于挤压仿生趾骨,并使其保持向下移动的趋势。
10、优选地,所述的仿生足骨的顶端固定有位置传感器,仿生足骨的外壁设置有缓冲机构。
11、优选地,所述的缓冲机构包括气缸、第三连接杆和第六连杆,气缸转动连接在仿生足骨的侧壁,气缸的底端设置有第三连接杆,第三连接杆的底端转动连接有第六连杆,第六连杆的一端固定有第四连接杆,仿生足骨的侧壁固定有限位块,第四连接杆的侧壁固定有第二连接板,第二连接板的底端固定有阻尼器,阻尼器的外壁套设有第二复位弹簧,阻尼器的底端固定有仿生跟骨。
12、优选地,所述的气缸设置有两组转动连接在仿生足骨的侧壁,气缸关于仿生足骨的中轴线呈对称分布,第四连接杆的外壁套设有限位块,阻尼器设置有四组,阻尼器关于第二连接板的中轴线呈等间距分布,第二复位弹簧用于挤压阻尼器,并使其保持向上移动的趋势。
13、本发明的工作原理及工作过程:
14、通过启动伺服电机,带动第一连接杆进行旋转,使得固定在连接盘外壁的第一固定柱进行旋转,连接盘旋转半圈的角度能够通过第一连杆与三角转盘的铰接连接带动三角转盘的角度关于第二固定柱进行旋转,使得铰接连接在三角转盘的一端和仿生腿骨内壁一端的第四连杆位置进行变化,使得能够带动仿生腿骨的角度进行变化,并且通过在第一固定柱的外壁套设的第二连杆在第一固定柱旋转时能够带动第二连杆进行变化,第三连杆能够将三角转盘与仿生腿骨形成一个整体,进而对仿生腿骨移动的位置进行限位,第二连杆与第三连杆铰接,使得第三连杆在旋转时能够在对仿生腿骨移动的位置进行一定限位的情况下带动仿生腿骨进行移动,通过将第五连杆交接在第三连杆的一端并且通过第五连接杆转动连接在仿生足骨的内壁,使得连接盘旋转半圈带动多组连杆在进行移动时带动仿生腿骨进行抬腿的动作,并在旋转后半圈时能够使其进行落腿,并通过设置有两组行走机构并将其设置为一前一后,能够使装置在只使用一组动力源的情况下带动装置整体进行行走的动作。
15、通过装置能够在行走时通过仿生趾骨和仿生足面相拼合的形状使得装置扩大前脚掌落地的面积,从而提高装置移动时的稳定性和抗沉陷能力,并且能够对装置整体起到支撑和传递力量的作用,仿生趾骨和仿生足面拼合后形状类似于鸭掌状,在松软或湿润的地面上行走时能够分散体重,减小对地面的压强,并且这种形状又扁又平,进一步增大了与地面的接触面积,当装置行走在松软的泥沙地上时,扁平的脚掌能够更好地分散体重,避免局部压强过大而导致陷入,通过在仿生趾骨的背端设置第一复位弹簧并将第一复位弹簧803的另一端固定在仿生足骨的底端,使得装置整体在行走时能够在抬脚后将其弯曲的角度进行复位,防止仿生趾骨和仿生足面的位置无法对装置整体起到支撑的效果,以此来达成提高装置移动时的稳定性和抗沉陷能力的目的,使得装置整体能够在沙地等松软地面上行走,并保证行走的速率。
16、本发明的有益效果:
17、本发明通过设置连接盘、第一固定柱、第一连杆、三角转盘等结构的配合,使得装置能够通过启动伺服电机,伺服电机在运行时带动第一连接杆旋转进而带动连接盘进行旋转,进而通过多组连杆之间的配合使得连接盘在旋转一种后能够完成抬脚以及落脚的动作,将该组件设置两组在两组第一连接板的外壁,并将两组的抬脚幅度进行匹配,使得该组件一组在前一组在后,在伺服电机启动后能够通过组件直接的配合完成一边落地一边抬起的动作,进而使得装置在只使用一组动力源的情况下控制设备完成行走的动作。
18、本发明通过设置仿生趾骨、仿生足面、第一复位弹簧等结构的配合,使得装置能够在行走时通过仿生趾骨和仿生足面相拼合的形状使得装置扩大前脚掌落地的面积,从而提高装置移动时的稳定性和抗沉陷能力,并且能够对装置整体起到支撑和传递力量的作用,通过在仿生趾骨的背端设置第一复位弹簧并将第一复位弹簧的另一端固定在仿生足骨的底端,使得装置整体在行走时能够在抬脚后将其弯曲的角度进行复位,防止仿生趾骨和仿生足面的位置无法对装置整体起到支撑的效果,以此来达成提高装置移动时的稳定性和抗沉陷能力的目的,使得装置整体能够在沙地等松软地面上行走,并保证行走的速率。
19、本发明通过设置气缸、第三连接杆、第六连杆等结构的配合,使得装置的一边在进行抬脚行走时,位置传感器通过检测第五连杆的位置来向气缸发出信号,气缸启动,推动第三连接杆并且带动第六连杆、第四连接杆和第二连接板的位置关于限位块进行旋转,使得第二连接板以及安装在第二连接板上的组件脱离与地面的接触,使得装置在行走时对自身的重力分配更加均匀,提高行走的稳定性,进一步的,位置传感器监测到第五连杆的位置反向移动时,气缸将第三连接杆收缩,从而快速将第六连杆、第四连接杆和第二连接板进行放下,使得第二连接板底端的仿生跟骨先接触到地面,第二复位弹簧首先吸收外部冲击产生的能量,并通过形变来储存这部分能量,阻尼器通过其阻尼作用将第二复位弹簧释放的能量转化为热能进行耗散,从而减少移动时产生的振动幅度和频率。
本文地址:https://www.jishuxx.com/zhuanli/20241021/319373.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。