3D打印配准导板自动生成方法及系统与流程
- 国知局
- 2024-11-06 14:26:01
本发明涉及开路机器人自主规划,尤其涉及一种3d打印配准导板自动生成方法及系统。
背景技术:
1、随着3d打印技术的不断发展,个性化的导板制作软件为导板大规模临床化应用提供了新的选择,其能够大大降低导板制作的复杂程度,降低软件和使用成本,但也存在着自动化程度低,医生学习曲线长,学习兴趣弱,导致规划效果无法保证,不利于临床推广等问题。
技术实现思路
1、本发明实施例提供一种3d打印配准导板自动生成方法及系统,能够解决现有技术中的问题。
2、本发明实施例的第一方面,
3、提供一种3d打印配准导板自动生成方法,包括:
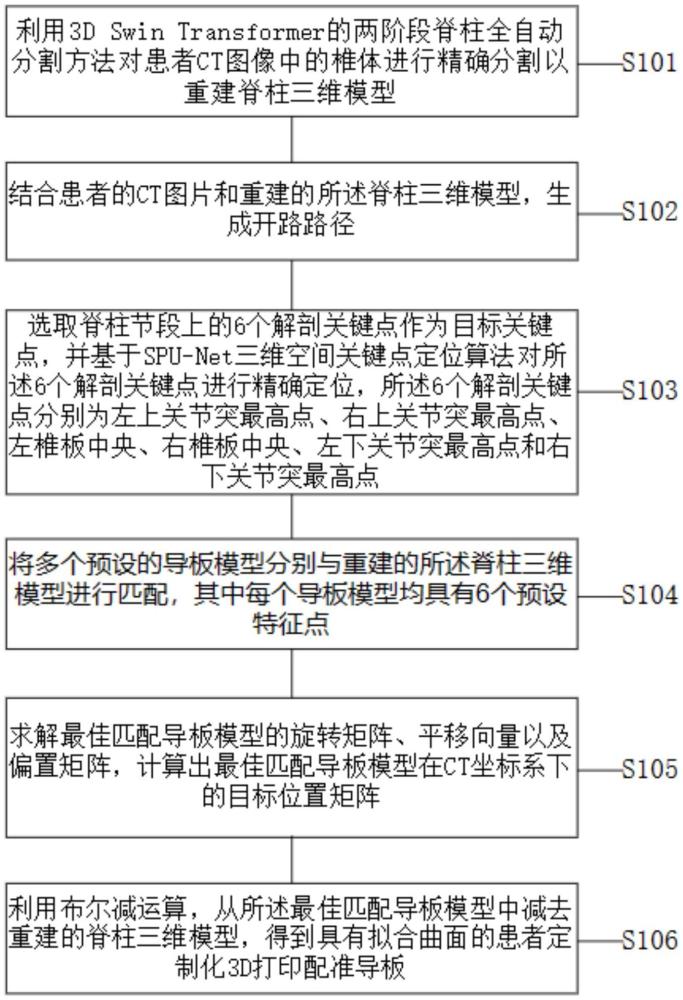
4、利用3d swin transformer的两阶段脊柱全自动分割方法对患者ct图像中的椎体进行精确分割以重建脊柱三维模型;
5、结合患者的ct图片和重建的所述脊柱三维模型,生成开路路径;
6、选取脊柱节段上的6个解剖关键点作为目标关键点,并基于spu-net三维空间关键点定位算法对所述6个解剖关键点进行精确定位,所述6个解剖关键点分别为左上关节突最高点、右上关节突最高点、左椎板中央、右椎板中央、左下关节突最高点和右下关节突最高点;
7、将多个预设的导板模型分别与重建的所述脊柱三维模型进行匹配,其中每个导板模型均具有6个预设特征点;
8、求解最佳匹配导板模型的旋转矩阵、平移向量以及偏置矩阵,计算出最佳匹配导板模型在ct坐标系下的目标位置矩阵;
9、利用布尔减运算,从所述最佳匹配导板模型中减去重建的脊柱三维模型,得到具有拟合曲面的患者定制化3d打印配准导板。
10、在一种可选的实施例中,
11、所述将多个预设的导板模型分别与重建的所述脊柱三维模型进行匹配的步骤,包括:
12、利用奇异值分解svd方法,求解所述6个解剖关键点到每个导板模型特征点的旋转矩阵和平移向量;
13、基于所述旋转矩阵和平移向量,计算每个导板模型的匹配误差,将匹配误差最小的导板模型确定为最佳匹配导板模型。
14、在一种可选的实施例中,
15、通过下式计算每个导板模型的匹配误差包括:
16、
17、其中,pj表示脊柱特征点,ri表示旋转矩阵,qj表示导板特征点,ti表示平移向量。
18、在一种可选的实施例中,
19、利用奇异值分解svd方法,求解所述6个解剖关键点到每个导板模型特征点的旋转矩阵和平移向量,包括:
20、在脊柱模型上提取若干个关键点作为源点集,在导板模型上提取对应数量的特征点作为目标点集;
21、构建源点集到目标点集的对应关系矩阵w,其中wij表示源点集中第i个点与目标点集中第j个点的对应关系权重;
22、对矩阵w进行奇异值分解,得到u、s、vt三个矩阵,其中u为m×m阶正交矩阵,s为m×n阶非负实数对角矩阵,vt为n×n阶正交矩阵,满足w=u×s×vt;
23、由矩阵u和vt计算旋转矩阵r=u×vt,由矩阵s的对角元素计算尺度因子s,其中尺度因子s为s对角线元素平均值;
24、将源点集的质心记为cs,目标点集质心记为ct,则平移向量t=ct-s×r×cs;
25、利用旋转矩阵r、尺度因子s和平移向量t,构建刚体变换矩阵,将脊柱模型配准到导板模型坐标系下。
26、在一种可选的实施例中,
27、解最佳匹配导板模型的旋转矩阵、平移向量以及偏置矩阵,计算出最佳匹配导板模型在ct坐标系下的目标位置矩阵,包括:
28、根据最佳匹配导板模型在模型坐标系下的6个特征点的坐标pi,其中i=1,2,...,6,以及重建的所述脊柱三维模型上对应的6个解剖关键点的坐标qi,其中i=1,2,...,6,通过奇异值分解svd方法,求解如下最小二乘优化问题,得到从pi到qi的旋转矩阵r和平移向量t:
29、min∑||r*pi+t-qi||^2;
30、设置偏置矩阵m,用于在r和t的基础上对最佳匹配导板模型的位置进行调整,以获得更优的初始位置;其中,所述偏置矩阵m由导板相对椎体位置的先验知识确定,用于提高配准精度;
31、将旋转矩阵r、平移向量t与偏置矩阵m相乘,得到最佳匹配导板模型在ct坐标系下的目标位置矩阵tct:
32、tct=m*[r,t];
33、其中[r,t]表示由r和t拼接而成的变换矩阵。
34、在一种可选的实施例中,
35、布尔减运算包括:
36、根据计算得到的所述目标位置矩阵,将最佳匹配导板模型的三维网格映射到ct坐标系下;
37、对ct坐标系下的脊柱三维模型进行三线性插值,对插值后的点进行二值化处理;
38、对映射后的导板三维网格模型进行体素化,令属于导板模型的体素赋值为1,其余赋值为0;
39、对赋值后的体素进行布尔减运算,从导板模型体素中减去脊柱模型体素;
40、对布尔减运算后的导板模型进行面绘制以重建三维网格模型,生成最终的患者定制化3d打印配准导板。
41、在一种可选的实施方式中,
42、选取脊柱节段上的6个解剖关键点作为目标关键点,基于spu-net三维空间关键点定位算法进行精确定位。
43、本发明实施例的第二方面,
44、提供一种3d打印配准导板自动生成系统,包括:
45、第一单元,用于利用3d swin transformer的两阶段脊柱全自动分割方法对患者ct图像中的椎体进行精确分割以重建脊柱三维模型;
46、第二单元,用于结合患者的ct图片和重建的所述脊柱三维模型,生成开路路径;
47、第三单元,用于选取脊柱节段上的6个解剖关键点作为目标关键点,并基于spu-net三维空间关键点定位算法对所述6个解剖关键点进行精确定位,所述6个解剖关键点分别为左上关节突最高点、右上关节突最高点、左椎板中央、右椎板中央、左下关节突最高点和右下关节突最高点;
48、第四单元,用于将多个预设的导板模型分别与重建的所述脊柱三维模型进行匹配,其中每个导板模型均具有6个预设特征点;
49、第五单元,用于求解最佳匹配导板模型的旋转矩阵、平移向量以及偏置矩阵,计算出最佳匹配导板模型在ct坐标系下的目标位置矩阵;
50、第六单元,用于利用布尔减运算,从所述最佳匹配导板模型中减去重建的脊柱三维模型,得到具有拟合曲面的患者定制化3d打印配准导板。
51、本发明实施例的第三方面,
52、提供一种电子设备,包括:
53、处理器;
54、用于存储处理器可执行指令的存储器;
55、其中,所述处理器被配置为调用所述存储器存储的指令,以执行前述所述的方法。
56、本发明实施例的第四方面,
57、提供一种计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现前述所述的方法。
58、在本实施例中,利用3d swin transformer自动分割椎体、spu-net精确定位关键点等算法,大幅减少了人工干预,提高了导板设计过程的自动化水平,降低了劳动强度。通过匹配预设导板模型与患者实际脊柱模型,并应用布尔减运算进行优化,能够为每位患者生成高度贴合的个性化定制导板模型,避免了一刀切的通用设计缺陷。基于高精度的医学影像分割与配准技术,导板能精确贴合患者的脊柱解剖结构,减小手术误差。同时布尔减运算去除了可能引起冲突的部分,进一步提高了适配性。精准个性化的导板设计,能有效指导手术操作,缩短手术时间,降低手术风险,提高手术质量,具有重要的临床实用价值。利用术前ct影像数据,可以预先生成定制化导板模型,支持术前手术路径和方案的规划,提高手术的准备质量。可推广应用于各种需要导板导引的手术场景,因此具有非常强的通用性和扩展潜力。个性化贴合设计的导板能最大程度地减小对患者身体的创伤,提升整体手术体验,有助于加快术后恢复。
本文地址:https://www.jishuxx.com/zhuanli/20241106/322048.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表