容器填充和秤重的方法及相关填充和秤重的单元与流程
- 国知局
- 2024-11-19 09:32:29
本发明一般与制药业填充样瓶、小瓶子及注射器等容器有关。特别是关于一种对空的或装有一物品的容器进行秤重的方法,及通过实施所述方法的一相关的秤重单元。
背景技术:
1、制药业经常有需求将预定剂量的药填充至样瓶、小瓶子及注射器等容器中。
2、这种情况下,容器里药量基本上容错率极低,例如即用型注射器为一精确例子。
3、此领域的现有技术为提供一个能容置多个欲填充的空容器的巢体(nest),机械手臂从所述巢体中一个一个取出容器,并单独进行秤重以得到正确的重量。
4、通常先秤得填充前所述空容器的重量。
5、秤得所述空容器的重量后,当放回所述巢体中的所述容器被填充,机械手臂将继续从所述巢体中一次取出一个容器,并用特定方式对其中一容器进行秤重,以得到所述容器及其内容物的重量(总重量),所述特定方式时常是利用秤重传感器。
6、为了加速对空容器及即将欲填充的预定物品进行秤重,所述机械手臂可以同时从所述巢体取出更多容器,并于秤重后将所述容器放回取出的所述巢体中。
7、上述方法在秤重步骤的流程时间上还有一些缺点,即使多亏许多现代系统使时间缩短,虽然有帮助但不容许高速,因为总是有要从所述巢体中取出容器以实施重量测量的需求。
8、如上述的从所述巢体中取出,每个容器需进行两次,因为必须秤得每个容器的空重量及每个容器含相关内容物的总重量。
9、欧洲专利文献ep-a-2949353公开了一垂直位移装置,所述装置包括多个推杆,所述推杆排列对应于一支撑构造中规则排列的多个样瓶,所述推杆从底部垂直抬升,一重量感测器可能结合于垂直位移的顶端。
10、换言之,垂直驱动所述重量感测器接触所述样瓶以进行秤重。
11、所述重量感测器的移动意味着秤得的重量缺乏精确度;再者,为了得到稳定的重量测量值必须等待很长的时间,如此才能抑制所述重量感测器因为垂直移动所造成的振动。
12、此外,必须提供所述重量感测器移动的系统,所述系统精密且相对小型,伴随的是生产成本的增加。
技术实现思路
1、本发明的第一个目的是制造一个通用的方法对容置于巢体中的多个容器进行秤重,如此可大幅减少多个容器秤重的时间,并排除测量值精确度不佳,以确保遵从领域所参照的标准规定。
2、本发明的第二个目的是通过一个简单且合理的建设性解决方案,制造一个能实施前述方法的通用秤重单元。
3、第一个目的实现是根据本发明的权利要求1,通过一方法来对排列于一支撑构造中的多个容器进行秤重。
4、第二个目的是根据权利要求10,通过一秤重单元来使多个容器排列于一支撑构造中。
5、更多的特征及益处将呈现于下文的描述中,所述描述不限于此发明的实施例,参考的范例也不限于附图。
技术特征:1.一种对排列于一支撑构造中的多个容器进行填充和秤重的方法,所述方法包含步骤如下:
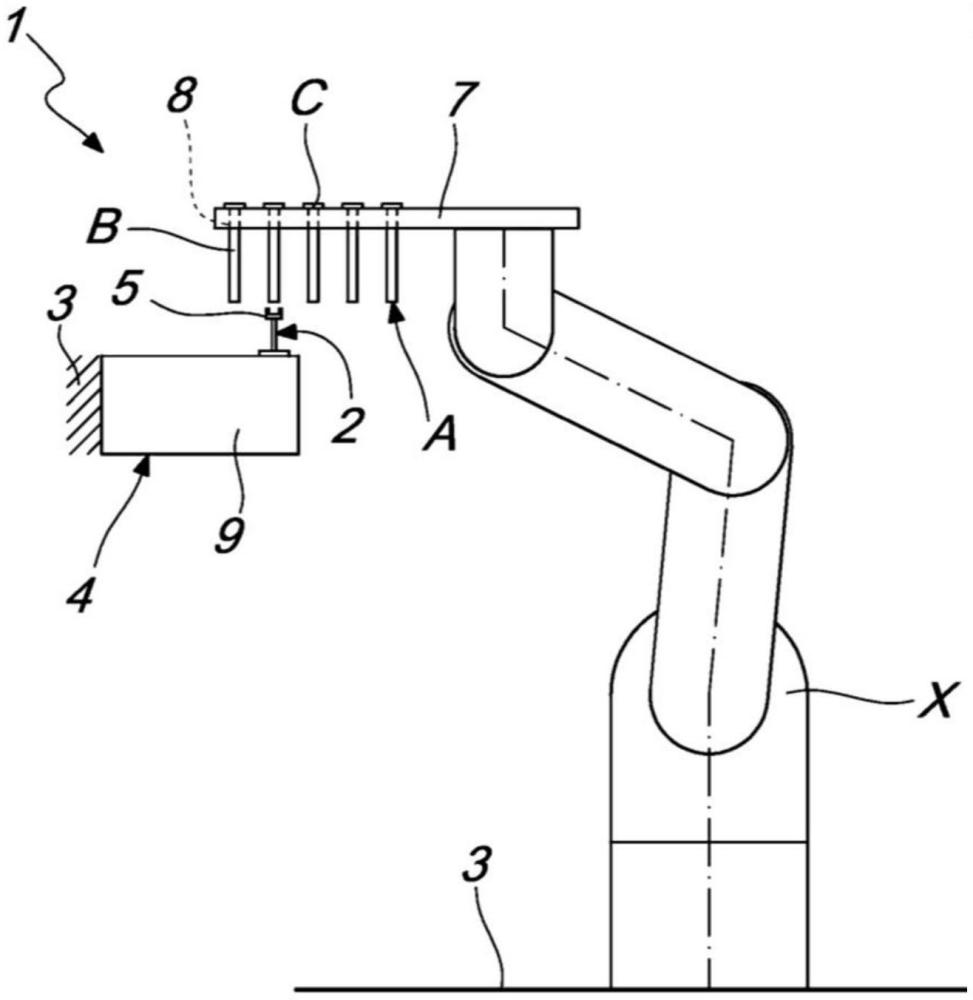
2.如权利要求1所述的方法,其特征在于:所述支撑构造(7)沿一垂直方向朝所述秤重元件移动,使所述容器(a)的所述支撑部(c)沿大致垂直方向自所述支撑构造(7)分离。
3.如权利要求2所述的方法,其特征在于:所述容器(a)的所述支撑部(c)自所述支撑构造(7)分离一距离,所述距离小于所述容器(a)的一纵向延伸,使得所述容器(a)不会完全离开所述支撑构造(7)的相应的开口(8)。
4.如上述权利要求任一项所述的方法,其特征在于:一支撑元件(2)与所述秤重元件(4)联结,在所述秤重的步骤期间,所述容器(a)的一底部b抵接在所述支撑元件(2)上。
5.如权利要求4所述的方法,其特征在于:在所述秤重的步骤期间,所述至少一容器(a)通过所述支撑元件(2)可移除的保持在一稳定位置上。
6.如上述权利要求任一项所述的方法,其特征在于:所述支撑构造(7)相对于所述秤重元件(4)通过所述操纵器(x)的移动由控制单位根据所述秤重元件(4)接收的一输入来控制。
7.如上述权利要求任一项所述的方法,其特征在于:在进行所述秤重的步骤中,所述秤重元件(4)通过固定在一腔室的一框架(3)的一支撑台(9)上而保持在一静止位置。
8.如上述权利要求任一项所述的方法,其特征在于:在以所述预定剂量的所述液态物质填充所述至少一个容器(a)之前,所述方法还包括对一空状态下的所述至少一个容器(a)进行称重。
9.如上述权利要求任一项所述的方法,其特征在于:所述操纵器(x)为为一机械手臂。
10.一种用于填充与秤重多个容器的机器的填充和秤重的单元(1),所述容器被排列于一支撑构造(7)中,其中所述支撑构造(7)设有所述容器(a)插入的多个开口(8),每一容器(a)从相应的开口(8)向下突出,而且每一容器(a)从抵接所述支撑构造(7)的一支撑部(c)保持悬挂,其特征在于:所述单元(1)包含:
11.如权利要求10所述的单元,其特征在于:当秤重时,所述支撑台(9)固定在一腔室的一框架(3)上。
12.如权利要求10或11所述的单元,其特征在于:所述秤重元件(4)包含一秤重传感器。
13.如权利要求12所述的单元,其特征在于:所述秤重传感器包含一支撑元件(2),所述支撑元件(2)配置为在秤重过程中稳定地保持所述至少一容器(a)抵接于所述支撑元件(2)上。
14.如权利要求10至13任一项所述的单元,其特征在于:所述操纵器(x)连接至一控制单元,所述控制单元被设定成用以根据所述秤重元件(4)接收的一输入来控制所述操纵器(x)的移动。
15.如权利要求10至14任一项所述的单元,其特征在于:所述开口(8)的每一个包括一圆孔,所述圆孔的一中心轴与接收的所述容器(a)的一纵轴重合。
16.如权利要求10至15任一项所述的单元,其特征在于:所述操纵器(x)为一机械手臂。
技术总结本发明提供一种容器填充和秤重的方法及相关填充和秤重的单元,所述方法包括:提供一支撑构造,以将多个容器支撑于一大致稳固的位置,其中所述支撑构造设有所述容器插入的多个开口,每一容器从相应的开口向下突出,而且每一容器从抵接所述支撑构造的一支撑部保持悬挂;将带有所述容器的所述支撑构造移至一秤重站,所述秤重站包含一秤重元件;以预定剂量的液态物质填充悬挂在所述支撑构造上的所述容器中的至少一容器中;对填充所述液态物质的所述至少一容器进行秤重。本发明可以克服现有技术的至少一个缺点。技术研发人员:克劳迪奥·特雷比,加布瑞里·加布西,米歇尔·库西尼受保护的技术使用者:I.M.A.工业机械自动装置股份公司技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/329235.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表