车辆自适应巡航控制方法、装置、设备及存储介质与流程
- 国知局
- 2024-12-06 12:19:23
本技术涉及车辆辅助驾驶,尤其涉及一种车辆自适应巡航控制方法、装置、设备及存储介质。
背景技术:
1、随着车辆智能化的发展,智能驾驶辅助技术普及率显著提升,自适应巡航技术在卡车长途运输的高速场景已广泛应用。基于车载传感器获得的前方车辆运动状态信息及自车运动状态信息,自适应巡航控制系统可实现自动控制车辆加速和制动,减轻驾驶员的疲劳,提高了行驶安全性和舒适性。
2、现有的自适应巡航控制系统是根据自车与前方车辆的运动状态信息及驾驶员设定的跟车距离计算目标加速度或目标车速,进而通过控制油门和刹车使自车达到目标车速。然而现有的自适应巡航控制系统严格控制车速以维持驾驶员设定的跟车距离,导致自车加、减速频繁,不符合人类驾驶习惯,舒适性和平顺性较差,油耗升高。
技术实现思路
1、本技术提供一种车辆自适应巡航控制方法、装置、设备及存储介质,用以解决现有的自适应巡航控制系统严格控制车速以维持驾驶员设定的跟车距离,导致自车加、减速频繁,不符合人类驾驶习惯,舒适性和平顺性较差,油耗升高的问题。
2、第一方面,本技术提供一种车辆自适应巡航控制方法,所述方法包括:
3、根据目标车辆前方车辆的车速值与所述目标车辆的车速值的第一比值,所述目标车辆的设定跟车距离与所述目标车辆的实际跟车距离的第二比值,确定所述目标车辆的目标加速度;其中,在所述第一比值位于第一区间范围内,并且所述第二比值在第二区间范围内时,所述目标加速度为0;
4、控制所述目标车辆以所述目标加速度行驶。
5、在一种可能的设计中,所述根据目标车辆前方车辆的车速值与所述目标车辆的车速值的第一比值,所述目标车辆的设定跟车距离与所述目标车辆的实际跟车距离的第二比值,确定所述目标车辆的目标加速度,包括:
6、根据所述目标车辆的车速值与所述前方车辆的车速值的差值、所述实际跟车距离与所述设定跟车距离的差值,确定所述目标车辆是否需要减速;
7、若否,则根据第一常量组、所述目标车辆的最大加速度、所述第一比值和所述第二比值,确定第一初始加速度,并将所述第一初始加速度与0之间的最大值作为所述目标加速度;
8、若是,则根据第二常量组、所述目标车辆的最大加速度、所述第一比值和所述第二比值,确定第一初始加速度,并将所述第一初始加速度与0之间的最小值作为所述目标加速度;
9、其中,所述第一常量组与所述第二常量组中至少部分常量取值不同。
10、在一种可能的设计中,所述根据所述目标车辆的车速值与所述前方车辆的车速值的差值、所述实际跟车距离与所述设定跟车距离的差值,确定所述目标车辆是否需要减速,包括:
11、根据述目标车辆的车速值与所述前方车辆的车速值的差值、所述实际跟车距离与所述设定跟车距离的差值,计算所述目标车辆的需求加速度;
12、若所述加速度需求大于或等于预设加速度阈值,则确定所述目标车辆无需减速;
13、若所述加速度需求小于所述预设加速度阈值,则确定所述目标车辆需要减速。
14、在一种可能的设计中,所述根据目标车辆前方车辆的车速值与所述目标车辆的车速值的第一比值,所述目标车辆的设定跟车距离与所述目标车辆的实际跟车距离的第二比值,确定所述目标车辆的目标加速度之前,所述方法还包括:
15、获取所述目标车辆前方道路的曲率信息;
16、检测到所述目标车辆即将进入前方弯道时,根据所述曲率信息计算所述前方弯道的弯道限制车速值;
17、若未检测到所述前方车辆,则判断所述目标车辆的设定巡航车速值是否大于所述弯道限制车速值;
18、若是,则将所述弯道限制车速值作为目标车速值;
19、若否,则将所述目标车辆驾驶员设定巡航车速值作为所述目标车速值;
20、根据所述目标车速值计算所述目标加速度;
21、若检测到所述前方车辆,则根据所述目标车辆前方车辆的车速值、所述目标车辆的车速值、所述弯道限制车速值以及,设定巡航车速值,确定是否执行根据第一比值,所述第二比值,确定所述目标车辆的目标加速度的步骤。
22、在一种可能的设计中,所述根据所述目标车辆前方车辆的车速值、所述目标车辆的车速值、所述弯道限制车速值以及,设定巡航车速值,确定是否执行根据第一比值,所述第二比值,确定所述目标车辆的目标加速度的步骤,包括:
23、判断所述前方车辆的车速值是否大于所述目标车辆驾驶员设定巡航车速值;
24、若否,则判断所述前方车辆的车速值是否大于所述弯道限制车速值;
25、若否,则执行根据第一比值,所述第二比值,确定所述目标车辆的目标加速度的步骤。
26、在一种可能的设计中,所述判断所述前方车辆的车速值是否大于所述目标车辆驾驶员设定巡航车速值之后,所述方法还包括:
27、若所述前方车辆的车速值大于所述目标车辆驾驶员设定巡航车速值,则判断所述目标车辆驾驶员设定巡航车速值是否大于所述弯道限制车速值;
28、若是,则将所述弯道限制车速值作为目标车速值;
29、若否,则将所述目标车辆驾驶员设定巡航车速值作为所述目标车速值;
30、根据所述目标车速值计算所述目标加速度。
31、在一种可能的设计中,所述判断所述前方车辆的车速值是否大于所述弯道限制车速值之后,所述方法还包括:
32、若所述前方车辆的车速值大于所述弯道限制车速值,则判断所述目标车辆驾驶员设定巡航车速值是否大于所述弯道限制车速值;
33、若是,则将所述弯道限制车速值作为目标车速值;
34、若否,则将所述目标车辆驾驶员设定巡航车速值作为所述目标车速值;
35、根据所述目标车速值计算所述目标加速度。
36、第二方面,本技术提供一种车辆自适应巡航控制装置,所述装置包括:
37、计算模块,用于:
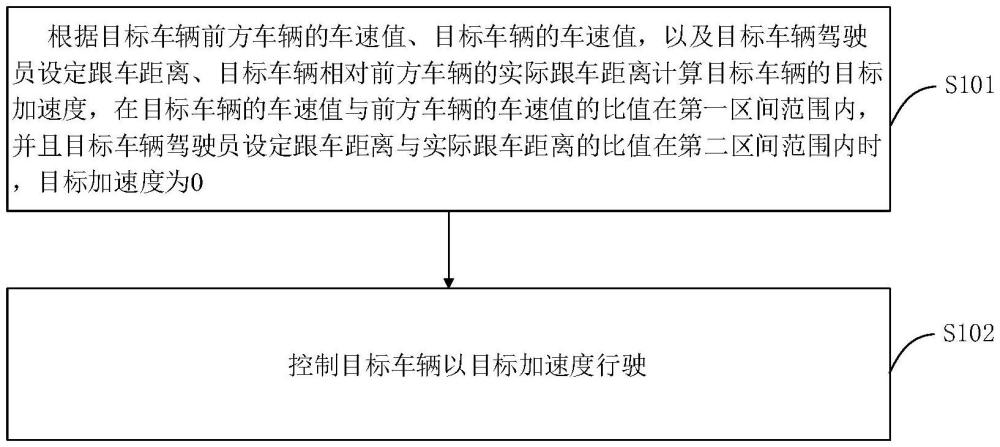
38、根据目标车辆前方车辆的车速值、所述目标车辆的车速值,以及所述目标车辆驾驶员设定跟车距离、所述目标车辆相对所述前方车辆的实际跟车距离计算所述目标车辆的目标加速度,在所述目标车辆的车速值与所述前方车辆的车速值的比值在第一区间范围内,并且所述目标车辆驾驶员设定跟车距离与所述实际跟车距离的比值在第二区间范围内时,所述目标加速度为0;
39、控制模块,用于:
40、控制所述目标车辆以所述目标加速度行驶。
41、第三方面,本技术提供一种车辆自适应巡航控制设备,所述设备包括:处理器,以及与所述处理器通信连接的存储器;
42、所述存储器存储计算机执行指令;
43、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面所述的车辆自适应巡航控制方法。
44、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面所述的车辆自适应巡航控制方法。
45、本技术提供的车辆自适应巡航控制方法、装置、设备及存储介质,实现了如下技术效果:
46、由于目标车辆的车速、前方车辆的车速与目标车辆和前方车辆的实际跟车距离是关联的,通过合理设置第一区间范围、第二区间范围,可以使目标车辆的车速值与前方车辆的车速值的比值在第一区间范围内小范围波动,同时目标车辆驾驶员设定跟车距离与实际跟车距离的比值在第二区间范围内小范围波动时,目标车辆无需加减速即可保证实际跟车距离满足预期的跟车距离需要,即,保证目标车辆驾驶员设定跟车距离与实际跟车距离的比值在第二区间范围内,因此,将目标车辆的目标加速度设为0,即控制目标车辆按照当前车速匀速行驶,而非如现有技术中通过加减速严格控制车速来使车辆维持驾驶员设定的固定的跟车距离。由于该方法允许目标车辆的车速值与前方车辆的车速值的比值在第一区间范围内小范围波动,以及目标车辆驾驶员设定跟车距离与实际跟车距离的比值在第二区间范围内小范围波动时,不对目标车辆进行加减速控制,从而克服了现有技术中严格控制车速以维持驾驶员设定的跟车距离,导致车辆加、减速频繁,不符合人类驾驶习惯,舒适性和平顺性较差,油耗升高的问题。
本文地址:https://www.jishuxx.com/zhuanli/20241204/340595.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。