一种车辆的侧向运动控制方法、装置、设备和存储介质与流程
- 国知局
- 2024-12-06 12:18:23
本发明涉及车辆运动控制领域,尤其涉及一种车辆的侧向运动控制方法、装置、设备和存储介质。
背景技术:
1、智能驾驶车辆运动的侧向的自动控制是智能驾驶汽车研究的重要内容,也是其研究实用化的关键。
2、由于车辆轮胎及转向系统都具有高度非线性且参数时变特征,尤其是车辆高速行驶工况下轮胎力学特性体现出严重的非稳态非线性特性,导致传统的自适应控制对被控对象进行参数辨识困难,进而控制器参数在线实时辨识整定不良,无法满足控制器的实时性,导致工程实用性不佳。
3、在实现本发明的过程中,发现现有技术中至少存在以下技术问题:
4、在其控制器及其控制逻辑设计中,由于车辆轮胎及转向系统都具有高度非线性且参数时变特征,尤其是车辆高速行驶工况下轮胎力学特性体现出严重的非稳态非线性特性,使得按照目前存在的车辆侧向控制方法建立的车辆侧向运动控制器很难满足车辆智能驾驶的实时性要求,工程实用性不佳,无法满足保证车辆智能驾驶安全行驶的需求。
技术实现思路
1、本发明提供了一种车辆的侧向运动控制方法、装置、设备和存储介质,以解决由于严重的非线性动力学特征,存在着参数整定不良,对运行工况变化适应性不好等等问题。
2、根据本发明的一方面,提供了一种车辆的侧向运动控制方法,包括:
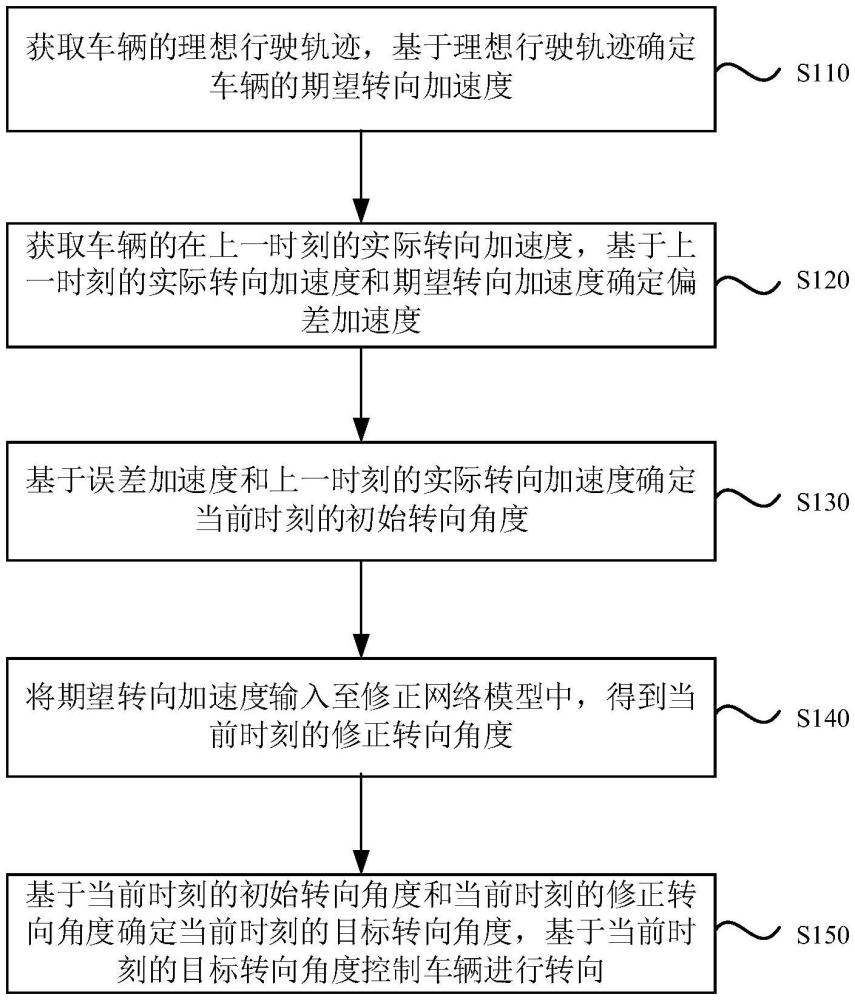
3、获取车辆的理想行驶轨迹,基于理想行驶轨迹确定车辆的期望转向加速度;
4、获取车辆的在上一时刻的实际转向加速度,基于上一时刻的实际转向加速度和期望转向加速度确定偏差加速度;
5、基于偏差加速度和上一时刻的实际转向加速度确定当前时刻的初始转向角度;
6、将期望转向加速度输入至修正网络模型中,得到当前时刻的修正转向角度;
7、基于当前时刻的初始转向角度和当前时刻的修正转向角度确定当前时刻的目标转向角度,基于当前时刻的目标转向角度控制车辆进行转向。
8、根据本发明的另一方面,提供了一种车辆的侧向运动控制装置,包括:
9、理想行驶轨迹获取模块,用于获取车辆的理想行驶轨迹,基于理想行驶轨迹确定车辆的期望转向加速度;
10、实际转向加速度获取模块,用于获取车辆的在上一时刻的实际转向加速度,基于上一时刻的实际转向加速度和期望转向加速度确定偏差加速度;
11、初始转向角度获取模块,用于基于偏差加速度和上一时刻的实际转向加速度确定当前时刻的初始转向角度;
12、修正转向角度获取模块,用于将期望转向加速度输入至修正网络模型中,得到当前时刻的修正转向角度;
13、目标转向角度获取模块,用于基于当前时刻的初始转向角度和当前时刻的修正转向角度确定当前时刻的目标转向角度,基于当前时刻的目标转向角度控制车辆进行转向。
14、根据本发明的另一方面,提供了一种电子设备,电子设备包括:
15、至少一个处理器;以及
16、与至少一个处理器通信连接的存储器;其中,
17、存储器存储有可被至少一个处理器执行的计算机程序,计算机程序被至少一个处理器执行,以使至少一个处理器能够执行本发明任一实施例的车辆的侧向运动控制方法。
18、根据本发明的另一方面,提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令用于使处理器执行时实现本发明任一实施例的车辆的侧向运动控制方法。
19、本发明实施例的技术方案,通过获取车辆的理想行驶轨迹,确定车辆的期望转向加速度;通过获取车辆的在上一时刻的实际转向加速度,基于上一时刻的实际转向加速度和期望转向加速度确定偏差加速度;通过偏差加速度和上一时刻的实际转向加速度确定当前时刻的初始转向角度,将期望转向加速度输入至修正网络模型中,得到当前时刻的修正转向角度;基于当前时刻的初始转向角度和当前时刻的修正转向角度确定当前时刻的目标转向角度,基于当前时刻的目标转向角度控制车辆进行转向。解决了传统自适应控制必须对复杂的汽车方向动力学非线性系统这一被控对象进行辨识而带来的如实时性等问题,提高了车辆侧向运动控制系统的鲁棒性和自适应性,具有较好的轨迹跟随性能。
20、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.一种车辆的侧向运动控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述偏差加速度和所述上一时刻的实际转向加速度确定当前时刻的初始转向角度,包括:
3.根据权利要求1所述的方法,其特征在于,所述修正网络模型为小脑模型控制器;
4.根据权利要求3所述的方法,其特征在于,所述至少一个映射位置为预设数量的连续映射位置;每一映射位置分别对应一修正权重信息,每一映射位置设置有二进制选择向量;
5.根据权利要求3所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述基于当前时刻的偏差加速度更新所述修正网络模型中各映射位置对应的修正权重信息,包括:
7.根据权利要求1所述的方法,其特征在于,所述基于所述理想行驶轨迹确定所述车辆的期望转向加速度,包括:
8.一种车辆的侧向运动控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的车辆的侧向运动控制方法。
技术总结本发明公开了一种车辆的侧向运动控制方法、装置、设备和存储介质。车辆的侧向运动控制方法,包括:获取车辆的理想行驶轨迹,基于理想行驶轨迹确定车辆的期望转向加速度;获取车辆的在上一时刻的实际转向加速度,基于上一时刻的实际转向加速度和期望转向加速度确定偏差加速度;基于偏差加速度和上一时刻的实际转向加速度确定当前时刻的初始转向角度;将期望转向加速度输入至修正网络模型中,得到当前时刻的修正转向角度;基于当前时刻的初始转向角度和当前时刻的修正转向角度确定当前时刻的目标转向角度,基于当前时刻的目标转向角度控制车辆进行转向,提高了车辆侧向运动控制系统的鲁棒性和自适应性。技术研发人员:李作文,张建,王宇,李航,张鸿,李伟男,朱可夫,孟祥哲,孙宇航,周宇航受保护的技术使用者:中国第一汽车股份有限公司技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340580.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种仿生青蛙弹跳结构
下一篇
返回列表