一种基于六自由度变载荷冗余并联机器人的控制系统
- 国知局
- 2024-12-06 12:22:25
本发明涉及机器人控制系统,具体说是一种基于六自由度变载荷冗余并联机器人的控制系统。
背景技术:
1、机器人运动学用于描述机器人的位置、速度和加速度等运动状态,而动力学则用于描述机器人在外部力或力矩作用下的运动行为。对于六自由度并联机器人,理解其运动学和动力学是控制系统设计的基础。
2、伺服电机是机器人系统中常用的执行器,它能够提供高精度、高速度的运动控制。通过伺服电机和高精度滚珠丝杆的稳定性对于机器人系统的整体稳定性至关重要。在控制系统中,需要确保伺服电机的控制响应速度和滚珠丝杆的定位精度能够满足系统稳定性的要求,以保证机器人系统的正常运行。
3、力矩传感器用于测量机器人末端执行器受到的力和力矩。对于变载荷冗余并联机器人,准确感知末端执行器的受力情况对于控制系统来说是至关重要的,这可以帮助机器人调整其姿态以适应外部负载变化,控制理论包括pid控制、模型预测控制、自适应控制、模糊控制、神经网络控制等多种方法。了解这些控制方法的原理和应用场景有助于设计出满足要求的控制系统,控制系统的设计和实现通常需要编写复杂的控制算法和仿真模型,matlab提供了软件编写算法平台,被用于控制系统的开发,同时连接硬件系统,用于仿真和实验验证,现有技术中的机器人控制系统无法精准地实现平台数据传输与控制器接收频率与物理时间实时一致,这不仅降低了系统的响应速度,还使得整个控制过程不稳定。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于六自由度变载荷冗余并联机器人的控制系统,能够在simulink里面编写控制算法或者搭建系统模型,在线完成对十二轴电机支腿的轨迹规划和力矩算法的验证。
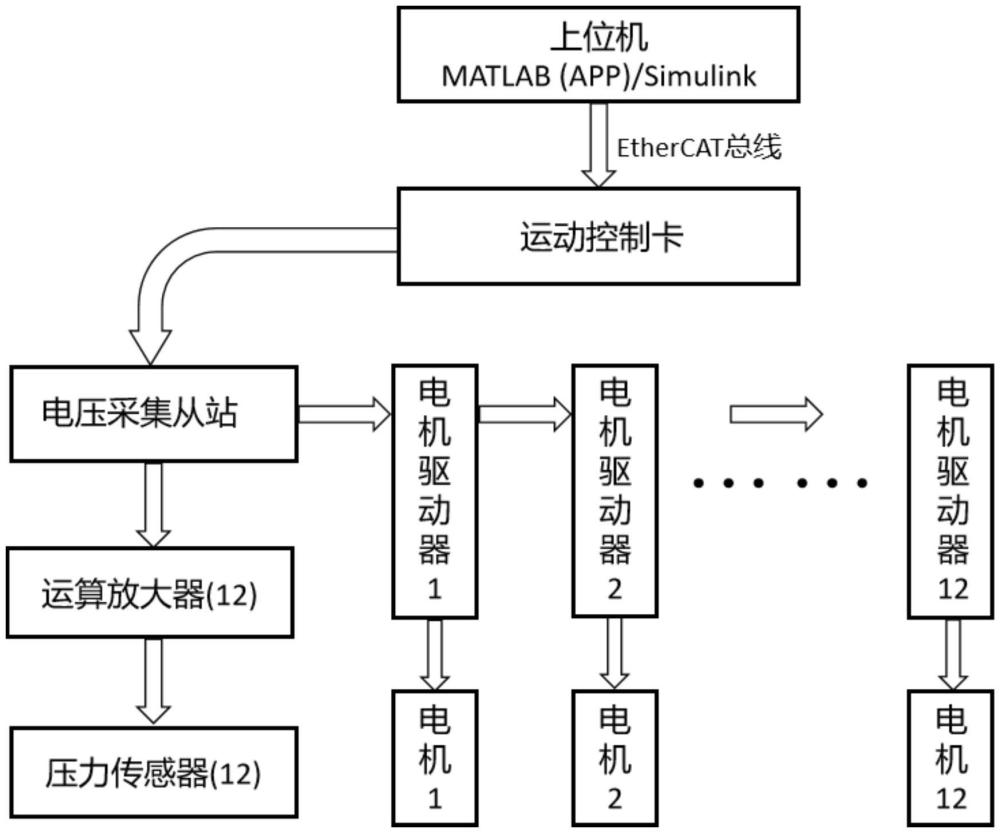
2、本发明解决上述技术问题所采用的技术方案是:一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:包括matlab-app电机调试软件和simulink仿真实验工程模型创建,上位机通过ip地址连接到运动控制器的网络端口,再以ethercat总线初始化成功后建立13个从站,分别对应电压采集拓展模块和12路电机驱动器,通过上位机在总线上的数据收发完成整个系统的闭环位姿与运动控制。
3、优选的,上位机利用ip地址与运动控制器的网络端口建立连接;
4、通过ethercat总线进行初始化,成功后建立13个从站,与多个从站进行位姿与控制数据的交换和保持各从站时钟同步,保证后续的数据传输和控制做好准备。
5、优选的,电压采集从站:实时采集系统中的电压数据,将电压数据转化成12条支腿的压力信息,并将其反馈给上位机,上位机根据这些数据进行分析处理,以监测系统的运行状态和电力供应情况;
6、12路电机驱动器:接收上位机通过ethercat总线发送的控制指令,通讯时间为1ms,驱动相应的电机以固定脉冲当量、加速度、速度、力矩运转,从而控制并联机器人的运动控制,每个电机驱动器负责一个特定的自由度,协同工作实现机器人的六自由度运动;
7、matlab-app电机调试软件:用于对电机进行调试,可调整电机的参数、测试电机性能,确保电机在系统中正常运行。
8、优选的,simulink仿真实验工程模型创建:提供仿真环境,在实际运行前能够对控制系统进行模拟和验证。
9、优选的,闭环位姿与运动控制包括以下步骤:
10、(3)上位机在总线上进行数据收发,接收来自电压采集拓展模块的反馈数据和电机驱动器的状态信息,同时发送控制指令给电机驱动器;
11、(4)根据反馈数据和预设的目标位姿及运动轨迹,上位机进行计算和分析,调整控制指令,实现闭环位姿与运动控制,通过不断地比较实际位姿与目标位姿、实际运动与预设运动轨迹的差异,并根据这些差异调整控制指令,确保机器人能够准确地跟踪目标位姿和运动轨迹。
12、优选的,电压采集从站内置的模块能够采集12路电压或电流,通过采集称重传感器变送器的放大倍数的电压值数据传递给运动控制卡,最终传递给上位机接收数据处理完成闭环控制。
13、优选的,运算放大器通过纯模拟电路对压力传感器的电压信号进行处理和变换,其基本电路组成主要包括:
14、微弱应变电桥,一、二级差动放大器,零位误差补偿电路,v/i转换电路,电源及输出回路等;电阻应变电桥式称重传感器通过应变电桥产生微弱的电压信号,该信号带有零位误差;首先,这个信号被输入到放大器u1,进行一级放大;随后,输出的电压与零位误差补偿电路输出的电压一起输入到放大器u2,进行二级差动放大;放大器u2的输出电压再被输入到v/i转换模块;最后,这个电流信号通过输出回路传输出去,把压力传感器的毫伏电压放大至0-10v内,以提高转化压力值后的精确度。
15、优选的,伺服电机选用绝对值编码器以及内置电池盒。
16、优选的,上位机通过运动控制卡获取24个输入数据,分别为12条支腿的压力信号和位置信号,输出数据为6条支腿的位置信息,在simulink仿真环境里编写控制算法;
17、不予考虑外部负载时,系统动力学模型为:
18、
19、ma——质量矩阵;
20、x——全局状态变量;
21、——速度向量,—即动平台的速度;
22、——加速度向量;
23、ca——离心力-向心力矩阵;
24、ga——重力向量矩阵;
25、fa——广义驱动力矩阵;
26、根据局部广义坐标系,通过逆运动学求解系统动力学模型;
27、驱动力施加到平台。
28、本发明的有益效果:
29、1、本发明采用simulink模型环境搭建,为控制算法编写和系统模型搭建提供基础平台;驱动器与电机型号选型:根据机器人的需求选择合适的驱动器和电机,保证性能和可靠性。
30、2、ad拓展模块连接用于扩展模拟信号的输入和输出,可与传感器等设备连接,运算放大器电路设计对信号进行放大和处理,以满足系统的要求,压力传感器量程转换及标定确保压力传感器能够准确测量所需的物理量,并将其转换为合适的信号供系统使用。
31、3、设计合适控制算法在simulink模型中搭建控制器,通过控制算法实现六自由度并联机器人的闭环定位控制和轨迹跟踪实验,保证机器人的精确运动。
32、总的来说,这个实验控制系统通过整合多种技术手段,旨在为六自由度冗余变载荷并联机器人提供一个高效、准确的控制方案,实现在simulink中进行轨迹规划和力矩算法验证等功能。
技术特征:1.一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:包括matlab-app电机调试软件和simulink仿真实验工程模型创建,上位机通过ip地址连接到运动控制器的网络端口,再以ethercat总线初始化成功后建立13个从站,分别对应电压采集拓展模块和12路电机驱动器,通过上位机在总线上的数据收发完成整个系统的闭环位姿与运动控制。
2.根据权利要求1所述的一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:上位机利用ip地址与运动控制器的网络端口建立连接;
3.根据权利要求2所述的一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:电压采集从站:实时采集系统中的电压数据,将电压数据转化成12条支腿的压力信息,并将其反馈给上位机,上位机根据这些数据进行分析处理,以监测系统的运行状态和电力供应情况;
4.根据权利要求3所述的一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:simulink仿真实验工程模型创建:提供仿真环境,在实际运行前能够对控制系统进行模拟和验证。
5.根据权利要求4所述的一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:闭环位姿与运动控制包括以下步骤:
6.根据权利要求5所述的一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:电压采集从站内置的模块能够采集12路电压或电流,通过采集称重传感器变送器的放大倍数的电压值数据传递给运动控制卡,最终传递给上位机接收数据处理完成闭环控制。
7.根据权利要求6所述的一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:运算放大器通过纯模拟电路对压力传感器的电压信号进行处理和变换,其基本电路组成主要包括:
8.根据权利要求7所述的一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:伺服电机选用绝对值编码器以及内置电池盒。
9.根据权利要求8所述的一种基于六自由度变载荷冗余并联机器人的控制系统,其特征在于:上位机通过运动控制卡获取24个输入数据,分别为12条支腿的压力信号和位置信号,输出数据为6条支腿的位置信息,在simulink仿真环境里编写控制算法;
技术总结本发明涉及机器人控制系统技术领域,具体说是一种基于六自由度变载荷冗余并联机器人的控制系统,包括MATLAB上位机软件GUI的编写、Simulink实时控制系统,上位机与运动控制卡以EtherCAT总线通信使从站节点连接到十二轴伺服电机驱动器,以多传感器融合技术同时采集十二轴电机编码器位置信息与十二支腿对下平台的压力值,在Simulink工程模型中设计合适的控制器,最终完成六自由度冗余并联机器人的运动控制与轨迹规划。本发明能够基于六自由度并联机器人链接到拥有强大功能的Simulink仿真平台,在线完成各种控制器的设计并进行闭环仿真和实验验证,满足科研与测试等功能需求。技术研发人员:李付志,钱彧哲,吴树杰,陈鹤,刘卫朋,曹斌受保护的技术使用者:河北工业大学技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340981.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。