一种基于移动轨迹的社团发现方法及设备
- 国知局
- 2024-12-06 12:24:14
本技术涉及社团发现,特别涉及一种基于移动轨迹的社团发现方法及设备。
背景技术:
1、随着新型城镇化的不断推进,大量人口涌入城市,城市内区域间的人群移动更加频繁。城市人群出行形成的起点-终点流(od流,origin-destination flow)交错分布,共同产生了复杂的交互网络。由于城市人群移动具有行为连续性和演变规律性,因此,人群移动形成的时空流具有时空耦合性和时空依赖性。通过这些时空流相互关联的城市区域呈现出一定的时空交互聚集模式,构成了交互网络中的时空社团结构。时空社团发现作为一种时空交互分析方法,有助于认识和了解城市人群移动组团动态结构和城市区域交互潜在规律,为城市规划与更新、城市交通系统管控与设施分配等现实应用提供决策信息。
2、时空社团发现研究首先需要构建交互网络。现有研究大多根据od流出发地和目的地地理位置将其映射到预先划分的不同格网或交通小区上,然后以格网或交通小区为节点,以格网或交通小区间的交互量为节点间边的权重,构建基于格网或交通小区的交互网络。还有部分研究将od流匹配到现实存在的停车位(如共享单车停车位、停车桩等)上,然后以停车位为节点,停车位间的交互量为节点间连边的权重,构建基于停车位的城市交互。上述方法均从空间区域视角将人群移动的起点和终点分别分配到格网、交通小区或停车位等固定单元节点上,割裂了单元节点间可能存在的连续性,同时忽略了人群移动的起点聚集和终点聚集现象背后隐含的语义信息。
3、现有社团发现方法主要分为静态社团发现和动态社团发现,其中,静态社团发现相对于动态社团发现不考虑时间维度特征的计算。现有动态社团发现方法主要分为四种:独立社团发现算法、增量社团发现算法、同步社团发现算法和基于时态网络的动态社团发现算法。独立社团发现算法首先按照时间切片构建交互网络,然后对每个时间切片的交互网络分别进行社团发现,然后借助相似度指标对不同时间切片上的社团进行匹配,进而分析社团的动态演变过程。增量社团发现算法首先基于时间切片构建交互网络,然后对首个时间切片的交互网络进行社团发现,进而基于当前时间切片的社团发现结果,对下一时间切片中节点或边发生变化的部分进行局部修改,得到下一时间切片的社团划分结果,重复上述步骤直到完成所有时间切片的社团发现。同步社团发现算法首先基于时间切片构建交互网络,然后通过在连续时间切片的交互网络之间加边,将多个时间切片的交互网络耦合成一个整体的网络,最后同时基于所有时间切片的交互网络进行社团发现。基于时态网络的社团发现算法不需要对交互网络进行时间切片操作,而是在每次交互网络的节点或边发生变化时,局部修正节点的社团归属,从而生成一系列动态社团结构。上述前三种方法均需要对基于时间切片构建交互网络,可能导致社团发现结果中时间分辨率低、社团发现结果不连续等问题,无法很好地捕捉交互网络的动态变化过程;而基于时态网络的社团发现算法则更关注局部社团划分结果,可能会忽视交互网络的整体结构特征。
4、由此可见,现有的社区发现方法存在社区发现的准确性低的问题。
技术实现思路
1、本技术提供了一种基于移动轨迹的社团发现方法及设备,可以解决社区发现的准确性低的问题。
2、第一方面,本技术实施例提供了一种基于移动轨迹的社团发现方法,该社团发现方法包括:
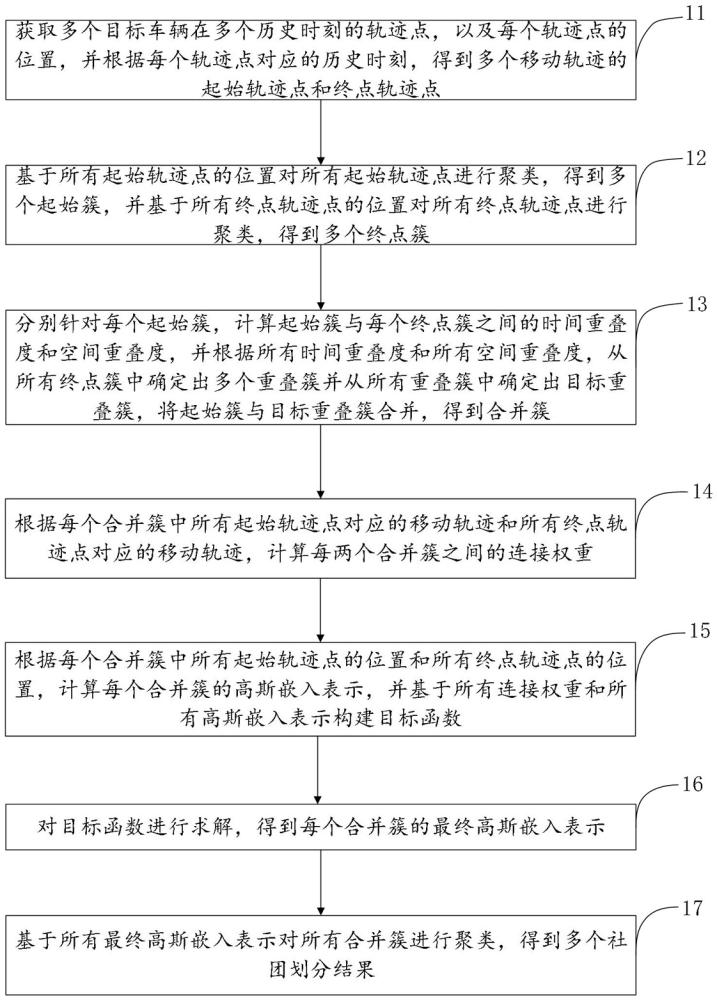
3、获取多个目标车辆在多个历史时刻的轨迹点,以及每个轨迹点的位置,并根据每个轨迹点对应的历史时刻,得到多个移动轨迹的起始轨迹点和终点轨迹点;
4、基于所有起始轨迹点的位置对所有起始轨迹点进行聚类,得到多个起始簇,并基于所有终点轨迹点的位置对所有终点轨迹点进行聚类,得到多个终点簇;
5、分别针对每个起始簇,计算起始簇与每个终点簇之间的时间重叠度和空间重叠度,并根据所有时间重叠度和所有空间重叠度,从所有终点簇中确定出多个重叠簇并从所有重叠簇中确定出目标重叠簇,将起始簇与目标重叠簇合并,得到合并簇;重叠簇对应的时间重叠度大于等于时间重叠度阈值,且对应的空间重叠度大于等于空间重叠度阈值,目标重叠簇与起始簇之间的距离小于所有其他重叠簇与起始簇之间的距离;
6、根据每个合并簇中所有起始轨迹点对应的移动轨迹和所有终点轨迹点对应的移动轨迹,计算每两个合并簇之间的连接权重;
7、根据每个合并簇中所有起始轨迹点的位置和所有终点轨迹点的位置,计算每个合并簇的高斯嵌入表示,并基于所有连接权重和所有高斯嵌入表示构建目标函数;高斯嵌入表示用于描述合并簇在时间和空间上的高斯分布,目标函数用于描述所有高斯嵌入表示的准确性;
8、对目标函数进行求解,得到每个合并簇的最终高斯嵌入表示;
9、基于所有最终高斯嵌入表示对所有合并簇进行聚类,得到多个社团划分结果;社团划分结果用于描述属于同一个社团的所有起始轨迹点和所有终点轨迹点。
10、第二方面,本技术实施例提供了一种基于移动轨迹的社团发现装置,包括:
11、获取模块,获取多个目标车辆在多个历史时刻的轨迹点,以及每个轨迹点的位置,并根据每个轨迹点对应的历史时刻,得到多个移动轨迹的起始轨迹点和终点轨迹点;
12、第一聚类模块,基于所有起始轨迹点的位置对所有起始轨迹点进行聚类,得到多个起始簇,并基于所有终点轨迹点的位置对所有终点轨迹点进行聚类,得到多个终点簇;
13、确定模块,分别针对每个起始簇,计算起始簇与每个终点簇之间的时间重叠度和空间重叠度,并根据所有时间重叠度和所有空间重叠度,从所有终点簇中确定出多个重叠簇并从所有重叠簇中确定出目标重叠簇,将起始簇与目标重叠簇合并,得到合并簇;重叠簇对应的时间重叠度大于等于时间重叠度阈值,且对应的空间重叠度大于等于空间重叠度阈值,目标重叠簇与起始簇之间的距离小于所有其他重叠簇与起始簇之间的距离;
14、计算模块,根据每个合并簇中所有起始轨迹点对应的移动轨迹和所有终点轨迹点对应的移动轨迹,计算每两个合并簇之间的连接权重;
15、构建模块,根据每个合并簇中所有起始轨迹点的位置和所有终点轨迹点的位置,计算每个合并簇的高斯嵌入表示,并基于所有连接权重和所有高斯嵌入表示构建目标函数;高斯嵌入表示用于描述合并簇在时间和空间上的高斯分布,目标函数用于描述所有高斯嵌入表示的准确性;
16、求解模块,对目标函数进行求解,得到每个合并簇的最终高斯嵌入表示;
17、第二聚类模块,基于所有最终高斯嵌入表示对所有合并簇进行聚类,得到多个社团划分结果;社团划分结果用于描述属于同一个社团的所有起始轨迹点和所有终点轨迹点。
18、第三方面,本技术实施例提供了一种终端设备,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,该处理器执行上述计算机程序时实现上述的基于移动轨迹的社团发现方法。
19、第四方面,本技术实施例提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述的基于移动轨迹的社团发现方法。
20、本技术的上述方案有如下的有益效果:
21、在本技术的实施例中,通过基于所有起始轨迹点的位置对所有起始轨迹点进行聚类,得到多个起始簇,并基于所有终点轨迹点的位置对所有终点轨迹点进行聚类,得到多个终点簇,再分别针对每个起始簇,计算起始簇与每个终点簇之间的时间重叠度和空间重叠度,并根据所有时间重叠度和所有空间重叠度,从所有终点簇中确定出多个重叠簇并从所有重叠簇中确定出目标重叠簇,将起始簇与目标重叠簇合并,得到合并簇,然后根据每个合并簇中所有起始轨迹点对应的移动轨迹和所有终点轨迹点对应的移动轨迹,计算每两个合并簇之间的连接权重,再根据每个合并簇中所有起始轨迹点的位置和所有终点轨迹点的位置,计算每个合并簇的高斯嵌入表示,并基于所有连接权重和所有高斯嵌入表示构建目标函数,然后对目标函数进行求解,得到每个合并簇的最终高斯嵌入表示,最后基于所有最终高斯嵌入表示对所有合并簇进行聚类,得到多个社团划分结果。其中,通过计算时间重叠度和空间重叠度再对起始簇和终点簇进行合并,考虑了起始轨迹点和终点轨迹点在时间和空间两个方面的联系,提高合并簇的合理性和准确性,计算合并簇之间的连接权重和高斯嵌入表示,能够估计人群移动的不确定性,并发现合并簇之间的连接关系,提高社团划分结果的准确性。
22、本技术的其它有益效果将在随后的具体实施方式部分予以详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20241204/341180.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表