具有至少一个履带式吊顶单元的吊顶悬挂装置以及将吊顶单元悬挂在吊顶结构处的方法与流程
- 国知局
- 2024-12-06 12:25:54
本发明涉及具有至少一个履带式吊顶单元的吊顶悬挂装置。此外,本发明涉及一种特别是在吊顶单元的二维定位的背景下将吊顶单元悬挂在吊顶结构上的方法。特别地,本发明涉及根据所附独立权利要求和从属权利要求的特征的装置和方法。
背景技术:
1、在现有技术中,已经在提供如下系统的背景下确立了多种设计理念:所述系统应在崎岖地形中或在不可预测的反作用力的背景下或在高倾斜度下或在高架布置中也能够确保预定的位置或运动。本发明侧重于那些偏离以下观点的理念:单元或载具或任何运输工具应以预定义的方式与例如在仓库或机械厅中的墙壁或吊顶处的预定义结构(例如高架提升机、爬墙机器人)进行接合/相互作用。在几乎不可进入的区域或系统(如管道系统、渠道系统)中的诊断和参数测量(包括磁性粘附/干扰)的背景下,已经公开了一些在结构和单元之间提供可靠接触的观点。然而,需要以下系统:所述系统能够通过与预定义结构的相互作用,以非常可靠的方式提供预定义的行进运动和高精度的定位(位置精度)(优选地与地下或墙壁构造的种类无关),其中应优选地以非常灵活且多样化的方式向多种区域或不同种类的墙壁或吊顶轮廓/几何形状提供预定义结构。
2、技术人员可以区分提供用于在地下移动的那些单元或载具和提供用于沿着吊顶结构移动的那些载具,特别是由于后者也必须以安全的方式被悬挂,从而避免坠落。因此,对于确保结构界面处相互作用/接合的运动学,可以有不同的方法。本发明侧重于在吊顶结构处/与吊顶结构的相互作用/接合。
技术实现思路
1、本发明的目的是提供一种系统,该系统允许至少一个单元在吊顶结构处的可靠且精确的悬挂/定位/行进,特别是允许实现单元的可变二维运动轨迹。特别地,所述目的还包括提供例如在承载问题的背景下允许牢固地悬挂吊顶单元的悬挂机构或悬挂装置。特别地,所述目的还可以包括提供用于将一个或多个吊顶单元与吊顶结构可靠地联接,并且还确保可靠的定位或甚至预定义的运动路径的适当的系统或概念。此外,本发明的目的还可以包括例如在物流任务的背景下用于将这种吊顶单元可移动地悬挂在吊顶结构处的主动驱动方法。
2、本发明的目的通过独立主要权利要求的特征来解决。在从属权利要求中指出了有利的特征。如果没有明确排除,则从属权利要求的教导可以与主要权利要求和从属权利要求的教导任意结合。
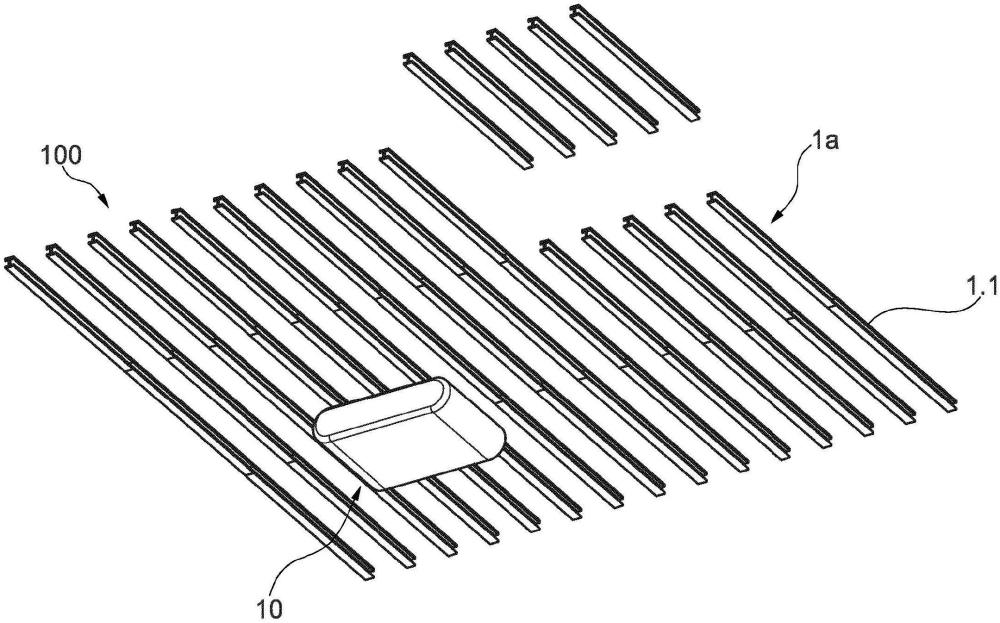
3、根据第一方面,本发明提供了一种吊顶悬挂装置,该吊顶悬挂装置具有至少一个履带式吊顶单元和在至少两个空间方向上延伸的吊顶结构,其中所述吊顶结构包括在第一空间方向上延伸(优选地连续地,特别是没有任何结构不连续性)的多个型材单元(特别是轨道),其中所述吊顶结构在第二空间方向上限定至少一个结构规则部(从而提供具有离散联接点的一维栅格,所述离散联接点在所述第二空间方向上分布在至少一个等距规则部中);并且其中所述履带式吊顶单元具有多个悬挂元件,所述多个悬挂元件被配置为用于悬挂所述吊顶单元并且被配置用于取决于所述吊顶单元在至少所述第二空间方向上相对于所述吊顶结构的相对运动,借助于分离/联接运动学将所述履带式吊顶单元联接到所述吊顶结构,其中所述履带式吊顶单元具有至少两个周向轨道(特别是基于牵引器件或由牵引器件限定的轨道,优选地为基于链的轨道),其中所述悬挂元件在与结构规则部对应的预定纵向位置处附接到所述周向轨道,其中所述周向轨道分别限定了所述相应的悬挂元件的周向运动的特定路径(或悬挂元件的联接器件的周向运动的特定路径,特别是相应的悬挂元件的自由端的周向运动的特定路径),从而特别是在履带式吊顶单元被配置为与在所述第二空间方向上的瞬时运动无关地沿着所述型材单元在所述第一空间方向上移动的情况下,在所述履带式吊顶单元在所述第二空间方向上移动期间提供分离/联接运动学。这种配置不仅便于在复杂结构的背景下或要同时使用多个吊顶单元的背景下实施,而且大大增加了关于定位的可变性。因此,如果需要,本发明还提供了实际的可扩展性(关于结构和关于吊顶单元的数量两者),即使在三维延伸中也是如此。
4、根据一个实施例,所述履带式吊顶单元是履带式吊顶载具,其可选地具有用于沿着所述结构主动驱动履带式吊顶单元的至少一个驱动单元(电机、致动器)。
5、因此,本发明还涉及基于几何预定义的运动学,通过沿着周向轨道的运动(自主地)分离/联接的悬挂元件的运动学。可选地,分离/联接运动学可以由吊顶单元本身主动驱动。特别地,该目的还可以通过一种履带式吊顶单元来解决,所述履带式吊顶单元被配置为特别是在结构处头向前地以悬挂方式主动行进,其中所述吊顶单元具有:多个悬挂元件,其被配置为悬挂吊顶单元并被配置为用于将吊顶单元联接到所述结构;和至少一个驱动器,其被配置用于周向驱动/引导运动(或悬挂元件沿着周向轨道的驱动运动),其中所述悬挂元件在与预定义栅格(特别是由所述结构限定的栅格)对应的预定义的第一纵向位置处附接到第一周向轨道,其中所述吊顶单元被配置用于,当悬挂元件通过周向运动(驱动/引导运动)沿着两个周向轨道被引导时,通过将多个悬挂元件的子集与所述结构分离或将它们联接到所述结构而沿着所述结构移动。这种配置还允许主动移动吊顶单元(或,允许吊顶单元自主移动),而不限于由特定型材单元(例如所述结构的轨道等)限定的预定义运动路径。
6、根据本发明,当提及“吊顶结构”时,可以指定为可以(至少部分地)在地面上或沿着墙壁或斜面(或类似物)延伸的结构。本发明可以优选地应用于分别布置在吊顶结构处或沿着吊顶结构行进的吊顶单元(或吊顶载具),此外,本发明还允许沿着具有可替代定向和/或布置的任何结构的任何运动。因此,提及“结构”或“吊顶结构”包括提及具有允许与本发明的吊顶单元联接的/联接到本发明的吊顶单元的目前描述的特征和相应的分离/联接运动学的任何其它“结构”。
7、根据本发明,当提及“载具”或“吊顶载具”时,本发明通常也是指履带式单元或载具及其相对空间布置或行进运动(例如,也在地面或斜面或墙壁上)。
8、根据本发明,当提及“周向轨道”时,本发明通常也是指闭环引导部和路线以及预定义的轮廓,所述悬挂元件被沿着这些轮廓引导和/或驱动,例如链或提供闭环的任何此种牵引器件。
9、根据本发明,当提及“型材单元”或“型材”或“t-型材”时,本发明通常也是指不同类型的型材,例如i-型材或l-型材,它们可以在单独应用中提供有益/有利的布置。
10、根据本发明,当提及“包裹”时,特别是在物流的背景下,包裹被理解为可以运输的任何物理对象,并且优选地不超过一定的尺寸和/或一定的重量(例如日常使用的物品,诸如消耗品或食品,以及技术物品和设备或邮寄物品、广告材料、小册子)。例如,包裹是未包装的物品、经包装的物品和经重新包装的物品,由此在经包装和重新包装的物品的情况下,“包裹”可以包括包装物或重新包装物以及包装在其中的物品。同样,可以有利地处理未包装的对象,特别是商品对象。每个包裹可以包括单独的识别特征,例如识别码(特别是例如应用于包裹、应用于包裹的外包装或应用于包装的储存单元和/或包裹的运输单元的物理码,和/或分配给包裹和/或包裹的数字孪生的数字码)。每个包裹都可以以数字方式在数字孪生中再现/反映(或数字孪生反映多个包裹),其中(而且)数字孪生优选地包含至少一个识别标记。例如,包裹/小包裹与小包裹识别码相关联,小包裹的数字孪生包含小包裹识别码。
11、应当注意,根据本发明,所述履带式吊顶单元也可以由用户引导,从而将履带式吊顶拉/推向特定方向。即,不一定提供主动驱动器。特别地,结合适当的传感器-执行器布置,所述履带式吊顶单元可以遵循预期的方向或预期的运动路径(特别是按照一种半被动引导模式;通过与个体的物理和/或视觉相互作用进行引导)。
12、根据一个实施例,所述吊顶悬挂装置被配置为用于(相应的)履带式吊顶单元在所述至少两个空间方向上的至少被动运动(外部驱动),和/或其中所述履带式吊顶单元被配置为用于在由所述至少两个空间方向限定的任意方向上(或位于由所述两个空间方位限定的平面内)的至少二维任意运动。
13、根据一个实施例,所述型材单元分别具有至少一个踏面,其中每个悬挂元件具有至少一种运动元件(用于滑动或滚动,特别是至少一个轮子),其被布置和配置用于在所述第一空间方向上使履带式吊顶单元至少被动地移动(特别是滑动或滚动)。
14、根据一个实施例,所述履带式吊顶单元被配置为用于实现相应的悬挂元件沿着相应的周向轨道的至少一个闭环轨迹,特别是被配置用于实现相应的悬挂元件的至少两个子集的至少两个闭环轨迹。
15、根据一个实施例,所述周向轨道被以如此方式成形使得当通过轨道的弯曲部分时,所述相应的悬挂元件与吊顶结构分离/联接,分离/联接到所述吊顶结构中。
16、根据一个实施例,分别在分别对应于结构规则部性的预定义的第一和第二(另外的)纵向位置处,悬挂元件的一个子集附接到周向轨道中的一个(或第一子集的子集,瞬时)并且悬挂元件的至少一个另外的子集附接到周向轨道中的另一个(或第二子集的子集、瞬时),特别地其中每个悬挂元件由一对周向轨道引导。
17、根据一个实施例,所述悬挂元件分别地,借助于第一滑轮固定地附接到/联接到第一周向轨道/与第一周向轨道附接/联接,并且借助于第二滑轮被在第二周向轨道内引导,其中所述第一滑轮和所述第二滑轮优选地布置在所述相应的悬挂元件的杠杆臂处。
18、根据一个实施例,每个悬挂元件具有第一滑轮和第二滑轮,所述第二滑轮在相应的悬挂元件的杠杆臂处相对于第一滑轮沿着纵向距离布置,其中悬挂元件经由第一滑轮和第二滑轮联接到第一周向轨道/所述第一周向轨道和第二周向轨道/所述第二周向轨道。
19、根据一个实施例,所述悬挂元件的相应子集通过纵向连接元件,特别是通过链元件彼此连接,从而形成以预定义结构规则部/所述预定义结构规则部彼此有距离的相互关联的悬挂元件的闭环。
20、根据一个实施例,相应的周向轨道具有链或由形成相互关联的链元件的闭环的链提供/限定。
21、根据一个实施例,所述履带式吊顶单元被配置用于在卸载状态下将相应的悬挂元件从所述结构中提升出来,特别是使得确保被瞬时卸载的悬挂元件的子集和由被瞬时加载的悬挂元件的子集悬挂所述履带式吊顶单元的两者的分离/联接运动学。
22、根据一个实施例,所述履带式吊顶单元具有至少两种/两种类型的悬挂元件,其中不同类型的悬挂元件根据单独的运动学(特别是在型材单元的相反方向/侧,特别是在履带式吊顶单元的第二空间方向或行进方向上和在与履带式吊顶单元的第二空间方向或行进方向相反的方向上)分离/联接,其中分别在分别对应于结构规则部(或对应于由所述结构规则部限定的型材单元的距离)的预定第一和第二(另外的)纵向位置处,悬挂元件的第一子集附接到第一对周向轨道(或第一子集的子集,瞬时)并且悬挂元件的至少一个另外的子集分附接到第二对周向轨道(或第二子集的子集,瞬时),其中所述第一对周向轨道和第二对周向轨道为所述悬挂元件的第一子集和第二子集的提供单独的运动学,特别是使得所述履带式吊顶单元在所述结构处或在所述型材单元处关于(第二空间方向的)相对侧/方向固定。
23、根据一个实施例,每个悬挂元件由一对周向轨道引导,其中履带式吊顶单元具有至少三对周向轨道,所述至少三对周向轨道各自引导悬挂元件的子集,其中所述分离/联接运动学由所述三对周向轨道以如此方式预定义,使得特别是在所有周向轨道彼此平行布置的情况下,特别是在所有悬挂元件被在相同的周向上引导的情况下,相应的悬挂元件(或相应子集的子集,瞬时)同时在相应的型材单元的第一侧(或第一纵向位置处)和相应的型材单元的第二侧(或第二纵向位置处)分离/联接,特别是使得履带式吊顶单元在吊顶结构处关于(第二空间方向的)相对侧/方向固定。
24、根据一个实施例,所述履带式吊顶单元具有至少一个负载附接点,该负载附接点被配置为用于转移附接到履带式吊顶单元的外部负载(例如,待以一维或二维方式沿着吊顶载送/运输/移动的物体或对象/个体)的负载。
25、根据一个实施例,所述履带式吊顶单元各自具有至少一个提升单元,或所述吊顶悬挂装置具有至少两个履带式吊顶单元,所述至少两个履带式吊顶单元各自具有至少一个提升单元,其中所述提升单元被配置为用于将外部负载(例如物体或对象/个体)的负载传送到所述吊顶结构。
26、根据一个实施例,所述履带式吊顶单元具有与所述周向轨道中的至少一个相互作用(或驱动)的至少一个驱动器,其中所述吊顶悬挂装置被配置为用于所述履带式吊顶单元至少在所述第二空间方向上的可预定义的从动运动(特别是来回地)。
27、根据一个实施例,所述履带式吊顶单元具有储能单元,所述储能单元向所述履带式吊顶单元的至少一个驱动器,特别是向与所述周向轨道中的至少一个相互作用(或驱动)的至少一个驱动器提供能量。
28、根据一个实施例,所述吊顶悬挂装置具有或限定至少一个能量充注点/位置,其中所述吊顶悬挂装置被配置为用于在布置在所述能量充注点或位置处时为至少一个履带式吊顶单元充电。
29、根据一个实施例,所述吊顶悬挂装置具有沿着型材单元的至少一个子集延伸的多个能量供应线,其中相应履带式吊顶单元的悬挂元件的至少一个子集被配置为例如借助于设置在与型材单元联接的相应的悬挂元件的自由端(或运动元件处)的集电器或动力滑块经由能量供应线提取能量。
30、根据一个实施例,所述吊顶悬挂装置(特别是至少一个履带式吊顶单元)具有感测装置,所述感测装置具有来自以下组中的至少一个传感器:速度传感器、距离传感器、位置测量传感器、力传感器、加速度传感器或陀螺仪;其中所述吊顶悬挂装置被配置用于基于(取决于)所述至少一个传感器的瞬时测量数据来控制所述至少两个履带式吊顶单元。
31、根据一个实施例,所述(相应的)履带式吊顶单元具有至少在吊顶悬挂装置内被配置用于无线通信的通信单元,其中所述(相应的)履带式吊顶单元具有储能单元,该储能单元向所述通信单元提供能量,特别是使得所述履带式吊顶单元在至少数天或数周或数月的时段内在能量上自我维持(自给自足)。
32、根据一个实施例,所述吊顶悬挂装置被配置为基于由单独的履带式吊顶单元传输的至少一个定位信号(被动或主动,例如被动地基于至少一个单独的发射机,特别是基于单独的识别特征)来对单独的履带式吊顶单元进行定位。
33、根据一个实施例,每个悬挂元件具有至少一个运动元件(用于滑动或滚动,特别是至少一个轮子),所述至少一个运动元件被布置且配置为用于使所述履带式吊顶单元在所述第一空间方向上移动(特别是滑动或滚动),其中所述履带式吊顶单元具有至少两个驱动器,所述至少两个驱动器与所述周向轨道中的至少一个和所述运动单元两者相互作用,其中所述吊顶悬挂装置被配置为用于所述履带式吊顶单元在所述空间方向上的可预定义的二维从动运动。
34、根据一个实施例,所述吊顶悬挂装置的所述型材单元分别根据相对于所述第二空间方向的至少两个不同的结构规则部(特别是结构密度),即第一结构规则部和第二结构规则部布置(即,根据至少两个等距规则部分布),所述第一结构规则部限定了与附接在轨道处的悬挂元件的相对(纵向)距离(相对于彼此)相匹配的所述型材单元的相对距离,所述第二结构规则部是所述第一结构规则部(或附接在轨道处的悬挂元件的相对纵向距离)的整数倍,其中在所述第二结构规则部的交叠区域内,瞬时接合/联接的悬挂元件的数量优选为至少两个,并且其中所述第一结构规则部的区域优选地具有第一承载能力并且所述第二结构规则部性的区域具有第二承载能力(特别是小于所述第一承载能力)。
35、根据一个实施例,所述吊顶悬挂装置的所述型材单元沿着所述吊顶在所述吊顶悬挂装置的至少两个空间部分中在空间上限定至少两个不同的容许负载(根据至少两种不同/具体的承载能力)(其中横截面在几何上保持相同)。
36、根据一个实施例,所述吊顶悬挂装置的型材单元的至少一个子集分别具有至少一个界定区域或边界线,该界定区域或边界线限定了至少一个履带式吊顶单元的行进区域和吊顶结构的不可触及的边界区域之间的界限(在该界限处,所述至少一个履带式吊顶单元不得行进或不得定位)。
37、根据一个实施例,其中所述吊顶悬挂装置与另一吊顶悬挂装置联接/所述吊顶悬挂装置联接到另一吊顶悬挂装置,其中所述吊顶悬挂装置的所述型材单元根据第一结构规则部(特别是结构密度)布置,其中所述另一吊顶悬挂装置的所述型材单元根据第二结构规则部布置,其中所述第二结构规则部是所述第一结构规则部的整数倍;其中,所述吊顶悬挂装置可以例如在至少两个不同水平的高度或楼层上延伸。
38、根据一个实施例,所述吊顶悬挂装置在至少两个不同水平的高度上延伸(从而提供三维行进方向),其中所述吊顶悬挂装置包括至少一个升降机,该至少一个升降机具有与吊顶悬挂装置的吊顶结构在几何上对应的升降机吊顶结构,其中所述吊顶结构合并/过渡到所述升降机吊顶结构(结构过渡),其中所述升降机被配置为从至少第一水平行进到第二水平,从而将所述高度水平与在所述至少两个不同水平处延伸的多个吊顶结构互连。
39、根据一个实施例,其中所述吊顶悬挂装置具有多个履带式吊顶单元,所述多个履带式吊顶单元各自具有至少一个附接点或提升单元,所述至少一个附接点或提升单元各自被配置为用于将至少50kg或100kg的外部负载的负载传送至所述吊顶结构,其中所述吊顶悬挂装置被配置为用于将特别是分别附接在一个履带式吊顶单元处的多个外部负载相对于彼此布置在单独的二维或三维位置处。
40、根据一个实施例,所述履带式吊顶单元具有至少一个附接点或提升单元,所述至少一个附接点或提升单元与所述周向轨道中的至少一个在结构上连接,其中所述履带式吊顶单元被配置为用于将至少200kg或500kg的外部负载的(例如个体的)负载传送至所述吊顶结构,其中所述吊顶悬挂装置被配置为至少用于经由所述附接点或提升单元悬挂的至少一个个体沿着所述吊顶结构的二维运输/移动。
41、根据一个实施例,所述履带式吊顶单元具有至少一个附接点或提升单元,所述至少一个附接点或升降单元与所述周向轨道中的至少一个在结构上连接,其中所述履带式吊顶单元被配置为用于将至少1.000kg或10.000kg的外部负载的(例如设备、机器或发动机或任何这种工业物体的)负载传送至所述吊顶结构,其中所述吊顶悬挂装置被配置为至少用于经由所述附接点或提升单元悬挂的所述外部负载沿着所述吊顶结构的二维运输/移动。
42、根据一个实施例,所述吊顶悬挂装置具有多个履带式吊顶单元,所述多个履带式吊顶单元各自具有至少一个附接点或升降单元,所述至少一个附接点或升降单元各自被配置为将外部负载的负载传送至所述吊顶结构,其中所述吊顶悬挂装置被配置为用于控制彼此依赖的至少两个履带式吊顶单元的子集的一维或二维移动或运动路径,特别是特别地通过还控制承载相同外部负载的(相应)子集的至少两个提升机使得所述(相应)子集的履带式吊顶单元类似地移动(特别是相对于彼此保持相同的距离)。
43、根据一个实施例,所述吊顶悬挂装置具有多个履带式吊顶单元,所述多个履带式吊顶单元各自具有至少一个容纳腔,所述至少一个容纳腔被配置为用于容纳至少一个包裹,其中所述吊顶悬挂装置(100)具有至少一个控制单元,所述至少一个控制单元被配置为进行无线控制或无线数据传输(特别是基于至少一个通信单元,例如近场、移动网络、lan、lp-wan、sigfox、nbiot),其中所述吊顶悬挂装置被配置为用于控制相应的履带式吊顶单元(特别是取决于期望/所需的目标位置,特别是基于由相应的履带式吊顶单元无线传输的或由吊顶悬挂装置的控制单元无线获取的相应的履带式吊顶单元或包裹的至少一个识别特征)和/或彼此依赖的至少两个履带式吊顶单元的子集的一维或二维移动或运动路径,特别是使得所述多个履带式吊顶单元根据多个单独的一维或二维运动路径同时移动。
44、根据一个实施例,所述履带式吊顶单元具有至少一个附接点或提升单元,所述至少一个附接点或提升单元各自被配置为用于将外部负载的负载传送至所述吊顶结构,其中所述吊顶悬挂装置具有传感装置,所述传感装置具有来自以下组中的至少一个传感器:力传感器、加速度传感器或陀螺仪;其中所述吊顶悬挂装置被配置为用于基于经由所述附接点或提升单元在至少一个空间方向上施加的主动力(特别是竖直向上的主动力)进行重力卸载,其中力的量取决于(或适于)特别是基于所述至少一个力传感器的瞬时数据的有效重力和/或有效负载(施加在所述附接点或提升单元处的有效重力),优选地,其中所述力的量是例如根据个人用户命令能够调节的。
45、根据一个实施例,所述至少一个履带式吊顶单元具有至少一个驱动器,其中所述吊顶悬挂装置单元具有控制所述驱动器的控制单元,其中所述吊顶悬挂装置具有感测装置,所述感测装置具有以下组中的至少一个传感器:速度传感器、距离传感器、位置测量传感器、力传感器、加速度传感器或陀螺仪;其中所述吊顶悬挂装置被配置为用于基于(取决于)所述至少一个传感器的瞬时测量数据来控制所述至少一个履带式吊顶单元,特别是用于控制所述至少一个履带式吊顶单元的绝对或相对位置或运动状态。
46、根据一个实施例,所述吊顶悬挂装置具有多个履带式吊顶单元,所述多个履带式吊顶单元相应地具有至少一个传感器(位置、距离、速度、加速度)和与所述吊顶悬置装置的(中央)控制单元通信的通信单元,其中所述吊顶悬挂装置被配置为用于,特别是基于至少一个单独的识别特征(例如每个单独的吊顶单元特有的代码),特别是通过向每个履带式吊顶单元的至少一个驱动器或致动器提供单独的命令预定义相应的履带式吊顶单元的二维运动的多个单独路径(特别是使得每个单独的运动路径被调节或适配于另外的履带式吊顶单元的瞬时移动条件和位置)。
47、根据一个实施例,所述吊顶悬挂装置具有中央控制单元,所述中央控制单元至少监测所述吊顶悬挂装置的所述(主动)履带式吊顶单元的瞬时位置,其中每个履带式吊顶单元具有通信单元,所述通信单元用于将控制信号无线传输至相应的履带式吊顶单元的至少一个驱动器或致动器;
48、或其中所述吊顶悬挂装置被配置为用于分散控制,其中每个履带式吊顶单元具有感测装置,所述感测装置将瞬时传感器数据(特别是速度和/或距离和/或位置和/或加速度数据)提供给所述履带式吊顶单元的至少一个驱动器或致动器。还可以将吊顶悬挂装置与中央控制单元相结合,其中所述履带式吊顶单元具有用于分散控制的特征,诸如用于与附近/相邻的履带式吊顶单元通信的感测和通信装置,从而提供特别安全的碰撞预防。这允许用户与一些履带式吊顶单元进行相互作用,而其它履带式吊顶单元可以自主移动,并且仍然可靠地避免任何碰撞。
49、根据一个实施例,所述吊顶悬挂装置被配置为,特别是通过阻挡相应的悬挂元件沿着周向轨道的周向运动(至少相对于第二空间方向的固定位置)和/或通过阻止相应的悬挂元件的运动元件(用于沿着型材单元滑动或滚动,特别是轮子)(至少相对于第一空间方向的固定位置),相对于至少一个运动方向阻挡相应的履带式吊顶单元,从而仅在所述第一或第二空间定向上提供(可选的)一维运动。
50、根据一个实施例,所述吊顶悬挂装置包括数据库,所述数据库被配置为用于存储和访问单独的履带式吊顶单元和/或由所述吊顶悬挂装置的所述履带式吊顶单元携带的单独的包裹的至少一个数字孪生,其中所述数字孪生至少包含瞬时状态的信息(例如相对/绝对位置、速度、负载条件、重量、容量、能量状态),其中所述吊顶悬挂装置被配置为基于所述至少一个数字孪生的信息为单独的履带式吊顶单元定义至少一个控制参数,特别是用于远程控制单独的履带式吊顶单元。
51、应当注意,在本发明的背景下,在包裹/小包裹的数字孪生中集成至少一个、有利地集成几个、甚至尽可能多地有利地更多个信息被认为是方便的。
52、上述目的还通过一种将至少一个履带式吊顶单元悬挂或定位在在至少两个空间方向上延伸的吊顶结构处的方法来解决,所述方法用于特别是在根据上述的吊顶悬挂装置中或在根据上述的吊顶悬挂装置的情况下、特别是通过对履带式吊顶单元的行进方向进行主动地重新定向(可以通过远程控制相应履带式吊顶单元的至少一个驱动单元或致动器来实施)、特别是与沿着所述吊顶结构主动地移动/驱动所述履带式吊顶组件相结合地为(相应的)履带式吊顶单元的以在所述吊顶结构以悬挂的方式头向前的至少二维定位或二维(行进)运动至少提供两个自由度,其中所述吊顶结构包括在第一空间方向上延伸的多个型材单元,其中所述吊顶结构在第二空间方向上限定至少一个结构规则部(从而限定仅在所述第二空间定向上具有离散联接点的一维栅格);其中所述履带式吊顶单元借助于多个悬挂元件悬挂,所述多个悬挂元件借助于取决于所述吊顶单元在至少所述第二空间方向上相对于所述吊顶结构的相对运动的分离/联接运动学将所述履带式吊顶单元联接到所述吊顶结构,其中所述悬挂元件(分别)附接到所述履带式吊顶单元的至少两个周向轨道(特别是基于牵引器件或由牵引器件限定的轨道,优选基于链的轨道)并由所述履带式吊顶单元的至少两个周向轨道引导,其中所述周向轨道分别限定相应的悬挂元件的周向运动的特定路径,从而特别是在履带式吊顶单元与在所述第二空间方向上的瞬时运动无关地沿着所述型材单元保持在所述第一空间方向上可移动(至少被动地)的情况下,在所述履带式吊顶单元(相对于所述吊顶结构)在所述第二空间方向上运动期间提供悬挂相应的悬挂元件并使相应的悬挂元件相对于所述吊顶结构相对移动的分离/联接运动学。
53、上述目的还通过一种计算机程序来解决,所述计算机程序包括指令,当该程序由计算机执行时,所述指令使得所述计算机特别是基于所述至少一个履带式吊顶单元的瞬时绝对和/或相对位置数据、特别是通过控制与至少一个周向轨道的相互作用的至少一个履带式吊顶单元的至少一个驱动器,在提供和控制至少一个履带式吊顶单元的运动或相对/绝对位置的背景下执行如上所述的方法的步骤。
54、可以将履带式吊顶单元的驱动单元连接到电机,特别是电动机。所述载具可以包括不同类型的动力单元、驱动器、电机和致动器,可选地不仅用于驱动单元,还可选地用于另外的功能,例如绞车或提升机功能。通常,所述载具可以被提供为具有与驱动机构或与悬挂元件相互作用的至少两个电机的主动载具。特别地,所述载具具有针对每个驱动单元配备了至少一个动力单元或电机,例如与齿轮单元(该齿轮单元与相应的周向轨道相互作用)的旋转轴联接的电动机,或经由至少一个第二驱动单元与悬挂元件的轮子相互作用的电动机,从而允许在至少两个空间方向上进行机动化运动,因此,所述轮子可以由任何驱动器驱动,以沿着型材轨道主动驱动。此外,所述载具或至少两个驱动单元可以包括储能单元,特别是可充电电池组,其为至少两个驱动器/电机提供能量,而与任何外部能量供应(针对用于驱动载具或轨道或沿着轨道的引导运动的电机的动力)。特别地,所述载具还可以具有至少一个提升机(提升单元)和被配置用于升降负载的牵引机构。例如,所述提升单元可以被固定至至少一个第一驱动单元并由其支撑。
55、所述载具的每个动力单元、驱动器、电机和/或致动器都可以被联接到载具的控制单元。特别地,控制单元可以控制运动的类型/种类,并且控制单元还可以例如在货物任务或物流任务的背景下控制例如提升单元的升降动作。例如,所述载具可以具有两个或三个驱动单元,所述两个或三个驱动单元可以以预定的横向距离彼此布置(例如通过横梁等限定/连接),并且如果所述载具以主动方式被驱动,则每个驱动单元可以具有至少一个驱动器/电机,用于在第二空间方向上沿着周向轨道或载具主动驱动悬挂元件,并且这些驱动器/电机可以例如经由转速彼此依赖地被控制。因此,可以特别是与沿着吊顶结构的型材轨道被驱动的悬挂元件的主动从动轮相结合地控制行进方向。
56、所述履带式吊顶载具还可以具有分别连接到至少一个电机的至少一个第一驱动单元和至少一个第二驱动单元,其中用于第一驱动单元和用于第二驱动单元的电机是不同的,从而提供载具的主动二维行进能力。所述载具的第一驱动单元的在数量上可以按比例增加;例如,所述载具具有三个第一驱动单元,所述三个第一驱动单元各自基于相同的运动学概念,但所述驱动单元的至少一个提供镜像反转类型/方式的分离/联接运动学。
57、所述载具可以例如包括作为第二驱动单元的一部分的至少一个完整轮。这经由第二驱动单元和与其连接的电机提供由结构限定的在第一空间方向上的主动运动,以及在另一空间方向上的被动运动。完整轮可以是其轮子踏面由辊子组成的轮子,所述辊子的旋转轴与主轮的旋转轴成一角度。轴之间的绝对角度可以例如是5至90度的任何角度,特别是45度。在控制至少两个电机时必须考虑该角度,因为在辊子与轮子的角度不同于90度的情况下,第一驱动单元和第二驱动单元的移动不是独立的。小于90度的角度可以导致关于完整轮与所述结构的型材的牵引力的有利配置。如果角度较小,则可以在轮子周围放置更多具有相同直径的辊子,这增强了牵引力传递,并可以补偿单个全向轮的牵引力传送中的间隙。所述完整轮也可以是盘形的并且包括围绕其周缘的多个均匀分布的辊子,使得其允许在第一空间方向上进行牵引力控制并且不受在第二空间方向上的运动的影响。辊子和轮子之间的角度可以是90度。这允许更容易地控制配置。
58、所述履带式吊顶载具还可以包括由至少两个同轴布置的完整轮组成的完整轮组,其中所述轮组连接到第二驱动单元。所述完整轮优选地是盘形的,并且具有作为所述结构的型材的宽度的一半的厚度,使得对于所述完整轮组的至少两个完整轮有空间与所述结构的一个型材(轨道)相互作用。这种配置增强了盘形完整轮的牵引力。所述同轴布置的完整轮各自相对于其相邻的完整轮可以在方位角方向上具有预定义的偏移。优选地是,如果一个完整轮包括n个辊子,这些辊子围绕轮的周缘均匀分布,则每个轮相对于其相邻轮偏移180/n度。通过这种方式,可以确保轮组中始终有至少一个轮子与所述结构的型材接触,并防止第二驱动单元的滑脱。
59、所述完整轮可以连接到返回机构,该返回机构向完整轮施加力,从而将它们压靠在吊顶结构上。这种配置还增强了完整轮在所述结构的型材(轨道)上的牵引力。
60、所述载具还可以包括至少一个宽的细长齿轮,用于在第一空间方向上与限定的栅格啮合,其中所述齿轮连接到第二驱动单元。所述宽的细长齿轮(也称为“正齿轮”)调节所述结构的型材中的额外的栅格(“子栅格”),使得齿轮的齿与子栅格啮合。当所述正齿轮经由电机和第二驱动单元转动时,所述载具在第一空间方向上向前拉动其自身。这可用于诸如3d打印的小型高精度应用。所述细长型齿轮可以在端部锥形化,以允许平稳过渡到额外的栅格。这降低了因与子栅格元件不完全对齐而停止或造成损坏的风险。
61、可以将履带式吊顶单元与机械臂结合使用。所述机械臂可以例如经由ep3705410a1中描述的类型的联接器件连接到履带式吊顶单元。所述机械臂可以具有用于安全地升降物体的器件。替代地,所述机械臂可以例如直接连接到相机、照明设备、焊机或其它工具。
62、下面,将讨论所述履带式吊顶载具和装置的先前描述的不同实施例的可能用例场景。所述用例可分为主要类别:物流、生产、运输、医疗保健、娱乐。一般来说,所述履带式吊顶单元可以通过将桥式起重机的灵活定位与桥式运输系统的灵活应用区域相结合,来克服所述桥式起重机和桥式运输系统的局限性。
63、在全自动/半自动仓库中,所述履带式吊顶单元可用于将包裹从一个位置运输到另一位置。可以用多个同步的履带式吊顶单元来升降特别重的物体。可以通过中央控制单元在包裹的数字孪生和履带式吊顶单元的帮助下来规划履带式吊顶单元的路径。全向移动的履带式吊顶单元为仓库或设施内的包裹处理提供了增强的可能性。
64、在混合工作站中,所述履带式吊顶单元可以通过帮助工人升降、握住和放置物体,或从其它区域给他带物体来对他进行辅助。此外,带有附接至其的机械臂的履带式吊顶单元可以辅助工作过程。可能的工作场景可以包括但不限于生产和装配线、维护/维修工作、飞机库、汽车车间、造船厂、港口、电影或摄影工作室。在电影或摄影工作室中,所述履带式吊顶单元可以升降照明和相机设备。此外,可以使用预编程的路线,从而使相机或照明设备遵循编程的移动。这可以通过使用多个同步的履带牵引装置来实现,使它们改变被升降物体的定向。替代地,所述履带式吊顶单元可以连接至具有相机的机械臂。
65、所述履带式吊顶单元的应用区域和定位的高度灵活性也允许在医疗保健应用,诸如康复和治疗(行走辅助)、老年护理、手术、患者护理和患者运输中使用。所述履带式吊顶单元可以例如升降患者或升降医疗设备,并且由于履带式吊顶在单元在吊顶结构中的全向运动,可以从多个角度触及患者。
66、这也允许所述履带式吊顶单元例如以重力卸载、射击场、艺术展览、舞台设计和游乐园的形式用于训练、模拟或娱乐目的。
67、也可以将所述履带式吊顶单元用于建筑工作。这里,所述履带式吊顶单元可以通过应用混凝土来帮助建筑过程,类似于3d打印过程。此外,一些履带式吊顶单元可以配备由用于升降砖块、铺设管道和线缆以及安装门楣和窗户的器件。在这方面,同步履带式吊顶单元的配合可以帮助加快建筑过程,并以自动化的方式建造整个房屋。
68、所述吊顶结构可以被分割为多个区域,其中优选地,向每个区域分配一个中央控制器。所述中央控制器优选地可以彼此通信,例如,从而彼此请求履带式吊顶单元。然后,所述履带式吊顶单元可以经由合适的运输器件从一个区域移动到另一区域。例如,升降机、(空中)列车或卡车也可以具有型材。此外,多个区域可以用允许履带式吊顶单元从一个区域移动到另一区域的轨道连接(例如在机场、零售店等)。
69、也可以在家庭环境中使用所述履带式吊顶单元,从而增强人类在家中或做家务的能力。所述履带式吊顶单元也可以用于3d打印、生物处理应用、拾取和放置机器或服务机器人中。
70、项目
71、aa.一种履带式载具,被配置用于特别是在结构处头向前地以悬挂方式行进,其中所述载具具有:
72、-多个悬挂元件,所述多个悬挂元件被配置用于悬挂所述载具并被配置用于将所述载具联接到所述结构,
73、-至少一个驱动单元,所述至少一个驱动单元被配置用于周向运动,并容纳第一周向轨道和与所述第一周向轨道具有不同的周向形状/轮廓的第二周向轨道,其中所述悬挂元件在与预定义栅格对应的预定义第一纵向位置处附接至第一周向轨道,其中所述载具被配置为用于当所述悬挂元件通过周向运动沿着两个周向轨道被引导时通过将多个悬挂元件的子集与所述结构分离或将它们联接到所述结构中而沿着所述结构移动。
74、ab.根据项aa所述的履带式载具,其中所述履带式载具的至少一个驱动单元被配置为用于能够实现所述悬挂元件的闭环轨迹。
75、ac.根据前述项中任一项所述的履带式载具,其中所述第一周向轨道和所述第二周向轨道成形为使得所述悬挂元件仅在通过所述轨道的弯曲部分时才与所述结构分离/联接到所述结构中。
76、ad.根据前述项中任一项所述的履带式载具,其中分别地,所述悬挂元件借助于第一滑轮固定地附接到/联接到所述第一周向轨道/与所述第一周向轨道附接/联接,其中所述悬挂元件经由第二滑轮被在所述第二周向轨道内引导,其中所述第一滑轮和第二滑轮所述优选地布置在相应的悬挂元件的杠杆臂处,其中所述相应的悬挂元件优选地具有l形;和/或其中每个悬挂元件具有第一滑轮和在相应的悬挂元件的杠杆臂处相对于所述第一滑轮以纵向距离布置的第二滑轮,其中所述悬挂元件经由所述第一滑轮和所述第二滑轮联接到所述第一轨道和所述第二轨道;和/或其中每个悬挂元件具有容纳/支撑由第二轨道引导的滑轮/所述滑轮的杠杆臂,其中所述滑轮布置在所述杠杆臂的自由端,并且其中在所述轨道的线性部分中,所述杠杆臂至少大致指向驱动/行进方向;和/或其中所述悬挂元件借助于纵向连接元件,特别是通过在相应的悬挂元件的第一滑轮/所述第一滑轮的轴线处连接的纵向连接元件彼此连接,从而形成在预定义栅格中彼此有距离的相互关联的悬挂元件的闭环。
77、ae.根据前述项中任一项所述的履带式载具,其中所述第一周向轨道具有链或由形成相互关联的链元件的闭环的链提供/限定;和/或其中所述第一周向轨道由连接所述悬挂元件的链限定;和/或其中所述载具具有多个反向轴承,所述反向轴承特别地被配置和布置用于与所述(吊顶)结构正面地相互作用,其中所述多个反向轴承优选地联接到所述第一周向轨道/与所述第一周向轨道联接,特别是联接到所述第一周向轨道的链元件。
78、af.根据前述项中任一项所述的履带式载具,其中所述载具具有容纳另外的周向轨道的另外的驱动单元,其中多个另外的悬挂元件在与预定义栅格/所述预定义栅格对应的预定义纵向位置处附接到另外的周向轨道并被配置用于悬挂载具并将载具联接到所述结构,特别是使得所述载具在结构处相对于相反方向被固定;和/或其中所述载具还具有附接到另外的周向轨道的另外的悬挂元件,其中所述悬挂元件和瞬时接合所述结构的另外的悬挂元件相对于驱动/行进方向和其相反方向在所述结构处固定/阻挡所述载具;和/或其中所述载具具有另外的驱动单元,所述另外的驱动单元与第一驱动单元具有相同的配置,但具有另外的悬挂元件和另外的周向轨道的镜像倒置布置,其中所述另外的悬挂元件在与所述第一驱动单元的所述悬挂元件的引导方向相反的方向上被引导/驱动,特别是使得相应的悬挂元件和另外的悬挂元件两者同时与所述结构联接/从所述结构分离。
79、ag.根据前述项所述的履带式载具,其中所述至少一个驱动单元被配置为用于在卸载状态下将相应的悬挂元件从所述结构中提升出来,特别是使得所述至少一个履带式驱动单元为瞬时卸载的悬挂元件的子集和同时通过瞬时加载的悬挂元件的子集悬挂载具两者提供分离/联接运动学;和/或其中所述至少一个驱动单元具有基本平面的配置;和/或其中所述载具具有至少两个彼此平行布置的驱动单元;和/或其中所述周向轨道分别在平面内被引导/驱动,以二维方式延伸。
80、ah.根据前述项中任一项所述的履带式载具,其中所述载具被配置为用于在至少两个空间方向上行进,所述至少两个空间方向即由所述结构预定义的第一空间方向和由所述至少一个驱动单元的引导/驱动运动限定的第二空间方向,其中所述第二空间定向与所述第一空间方向正交,从而优选地提供所述载具的至少二维运动能力;和/或其中相应的悬挂元件具有至少一个轮子,所述轮子被布置和配置为用于特别是在所述结构的相应/对应型材的轮子踏面上沿着所述结构被引导;和/或其中所述至少一个驱动单元借助于至少三个悬挂元件联接;和/或其中相应的悬挂元件具有提供两个臂的l形,所述两个臂限定了相应的悬挂元件的轮子和第一滑轮和第二滑轮的相对布置。
81、ai.履带式载具装置,包括至少一个根据前述项中任一项所述的履带式载具和结构,所述结构具有限定所述结构的栅格的多个型材,其中所述悬挂元件被配置为在由所述结构限定的(第一)空间方向上沿着所述型材被引导,所述载具的行进运动具有至少两个自由度;和/或其中所述结构具有限定所述结构的栅格/所述栅格的多个型材,其中所述载具具有与所述悬挂元件一起将所述载具悬挂的多个另外的悬挂元件,其中所述悬挂元件和所述另外的悬挂元件相对于所述驱动/行进方向在所述结构处固定/阻挡所述载具。
82、aj.根据项ai所述的履带式载具装置,其中所述型材分别具有至少一个动力轨,其中所述载具被配置为用于借助于经由所述动力轨,特别是经由设置在所述悬挂元件内的集电器供应的能量来驱动所述至少一个驱动单元。
83、ak.将履带式载具在结构处/从结构处悬吊/悬挂的方法,用于特别地使根据项目aa至ah中的一项的履带式载具在结构处头朝前地以悬挂方式行进,其中借助于将所述载具联接到所述结构的多个悬挂元件悬挂所述载具,其中通过具有不同周向形状/轮廓的第一周向轨道和第二周向轨道限定周向引导/驱动运动,其中所述悬挂元件在与由所述结构限定的栅格对应的预定义的第一纵向位置处附接到所述第一周向轨道,其中将所述载具悬挂为,使得当通过周向运动沿着所述周向轨道引导所述悬挂元件时,通过将所述多个悬挂元件的子集从所述结构分离或将它们联接到所述结构中,使所述载具能够沿着所述结构移动。
84、al.根据前述方法项所述的方法,其中所述周向运动由瞬时接合所述结构的所述悬挂元件传递/传送;和/或其中所述周向运动由第一驱动单元和第二驱动单元提供,其中所述第一驱动单元提供所述悬挂元件的第一子集在第一闭环轨迹上的周向运动,所述第二驱动单元提供所述悬挂元件的第二子集在第二闭环轨迹上的周向运动。
85、am.根据方法项目ak或al所述的方法,其中所述周向引导/驱动运动是对所述载具上的例如由外部推力或驱动力提供的外部致动作出反应的被动引导运动,所述外部推力或驱动力能够经由所述载具或所述至少一个驱动单元的至少一个横向表面传递至所述载具。
86、an.计算机程序,包括指令,当所述程序由计算机执行时,所述指令使计算机特别是通过控制所述至少一个驱动单元,在提供和控制周向引导/驱动运动的背景下,执行根据方法项ak至am中的至少一项的方法的步骤。
87、ao.容纳具有不同周向形状/轮廓的第一周向轨道和第二周向轨道的至少一个履带式驱动单元的用途,用于特别是在根据项ak至am中的一项的方法中悬吊/悬挂并可选地还主动驱动履带式载具,从而特别是在结构处头向前地以悬挂方式行进,特别是用于悬吊/悬挂根据项aa至ah中的一项的履带式载具,其中借助于多个悬挂元件悬挂所述载具,所述多个悬挂元件将载具联接到所述结构,其中所述悬挂元件在与由所述结构限定的栅格对应的预定义的第一纵向位置处附接到所述第一周向轨道,其中通过所述至少一个驱动单元提供周向引导/驱动运动,使得当沿着所述周向轨道引导/驱动所述悬挂元件时,通过将所述多个悬挂元件的子集从所述结构分离或将它们联接到所述结构中,所述载具沿着所述结构移动。
88、ba.履带式吊顶载具,被配置用于特别是在吊顶结构处头向前地以悬挂方式行进,其中所述吊顶载具具有:
89、-多个悬挂元件,所述多个悬挂元件被配置用于悬挂所述吊顶载具并被配置用于将所述吊顶载具联接到所述吊顶结构,
90、-至少一个驱动单元,所述至少一个驱动单元被配置用于周向运动,并容纳第一周向轨道和与所述第一周向轨道具有不同的周向形状/轮廓的第二周向轨道,其中所述悬挂元件在与预定义栅格对应的预定义第一纵向位置处附接至第一周向轨道,其中所述吊顶载具被配置为用于当所述悬挂元件通过周向运动沿着两个周向轨道被引导时通过将多个悬挂元件的子集与所述吊顶结构分离或将它们联接到所述吊顶结构中而沿着所述结构移动。
91、bb.根据项ba所述的履带式吊顶载具,其中所述吊顶载具被配置为用于当所述悬挂元件通过周向运动沿着周向轨道中的至少一个的弯曲部分被引导时通过将多个悬挂元件的子集与所述吊顶结构分离或将它们联接到所述吊顶结构中而沿着所述结构移动。
92、bc.根据前述项中任一项所述的履带式吊顶载具,其中所述第一周向轨道和所述第二周向轨道至少在所述轨道的弯曲部分处基于不同的周向形状/轮廓提供分离/联接运动学,其中所述悬挂元件在相对于相应的第一纵向位置纵向偏移的相应的第二纵向位置处在所述第二轨道中被引导/由所述第二轨道引导,其中当所述悬挂元件通过周向驱动运动被沿着所述周向轨道的弯曲部分引导时,分离/联接运动学提供使每个悬挂元件枢转的第一运动和第二运动两者;和/或其中所述分离/联接运动学至少在沿着运动路径的部分中在相应的悬挂元件自由端处的支承点提供s形运动路径;和/或其中所述分离/联接运动学包括在相应的悬挂元件自由端处的支承点/所述支承点的竖直运动运动学和非圆形枢转运动运动学两者;和/或其中所述第一周向轨道和所述第二周向轨道被以如此方式成形使得所述悬挂元件仅在通过所述轨道中的至少一个的弯曲部分时才与所述吊顶结构分离/联接到所述吊顶结构中。
93、bd.根据前述项中任一项所述的履带式吊顶载具,其中相应的悬挂元件在所述第一轨道处的瞬时相对第一纵向位置限定了该悬挂元件的瞬时旋转中心,而在第二轨道处的相对应的相对第二纵向位置限定了该悬挂元件的瞬时旋转量;和/或其中轨道被以如此方式成形相应的悬挂元件的第二空间方向的瞬时竖直坐标和瞬时坐标两者由所述轨道的轮廓限定和调节;和/或其中所述轨道具有至少在所述轨道的弯曲部分处偏离履带式轨道的标准跑道形状的形状/轮廓,其中所述第一轨道的形状优选地至少在竖直方向上偏离,其中所述第二轨道的形状优选地在竖直方向和所述第二方向上偏离;和/或其中所述第一轨道的曲率半径至少近似地恒定;和/或其中在沿着所述轨道(多个)的至少一个纵向位置处,所述第二轨道的曲率半径大于所述第一轨道的曲率曲率半径,并且在沿着所述轨道(多个)的至少另一纵向位置处,所述第二轨道的曲率半径小于所述第一轨道的曲率半径,其中所述轨道的曲率半径优选地作为沿着所述轨道(多个)的瞬时纵向位置的函数以稳定/连续的方式不同/变化;和/或其中所述第一轨道的轮廓提供了相应的悬挂元件的接触/支承点的第一运动,并且当相应的悬挂元件沿着周向轨道的弯曲部分/所述弯曲部分被引导时,所述第二轨道相对于所述第一轨道的轮廓和变化距离提供了所述相应的悬挂元件的接触/支承点的枢转运动。
94、be.根据前述项中任一项所述的履带式吊顶载具,其中所述轨道的所述形状/轮廓作为沿着所述轨道的纵向位置的函数提供所述悬挂元件的升和降两者,特别地在分离的背景下的先升后降,在联接的情况下反之亦然;和/或其中所述轨道的相对径向距离沿着所述轨道的线性部分是恒定的,并且所述轨道的相对径向距离特别是以稳定/连续的方式作为沿着所述轨道(多个)的瞬时纵向位置的函数而沿着所述轨道的弯曲部分不同/变化。
95、bf.根据前述项中任一项所述的履带式吊顶载具,其中所述吊顶载具具有容纳另一周向轨道并被配置为用于同步周向驱动运动的另一驱动单元;和/或其中所述吊顶载具具有容纳另一周向轨道的另一驱动单元,其中多个被配置用于悬挂所述吊顶载具并被配置用于将所述吊顶载具联接到所述吊顶结构的另外的悬挂元件在与由所述吊顶结构限定的栅格/对应的预定义的另外的纵向位置处附接到所述另一周向轨道;和/或其中所述悬挂元件和所述另外的悬挂元件相对于所述驱动方向并与所述驱动方向相反地在所述吊顶结构处固定/阻挡所述吊顶载具。
96、bg.根据前述项中任一项所述的履带式吊顶载具,其中所述吊顶载具具有至少一个提升单元,或所述吊顶载具具有至少两个或三个提升机。
97、bh.履带式吊顶载具装置,包括至少一个根据前述项中任一项所述的履带式吊顶载具和吊顶结构/,所述吊顶结构具有限定所述吊顶结构的栅格的多个型材,其中所述悬挂元件被配置为在所述第一空间方向上沿着所述型材被引导,所述吊顶载具的行进运动具有至少两个自由度;和/或其中所述吊顶结构具有限定所述吊顶结构的栅格的多个型材,其中所述吊顶载具具有与所述悬挂元件一起将所述吊顶载具悬挂的多个另外的悬挂元件,其中所述悬挂元件和所述另外的悬挂元件相对于所述驱动/行进方向在所述吊顶结构处固定/阻挡所述吊顶载具。
98、bi.根据前述项所述的履带式吊顶载具装置,其中所述型材分别具有至少一个动力轨,其中所述吊顶载具被配置为用于借助于经由所述动力轨,特别是经由设置在所述悬挂元件内的集电器供应的能量来驱动所述至少一个驱动单元。
99、bj.根据项bh或bi所述的履带式吊顶载具装置,其中所述吊顶结构特别地基于配备有所述吊顶结构的型材的瓦片是模块化的且可扩展的。
100、bk.根据项bh至bj中任一项所述的履带式吊顶载具装置,其中所述履带式吊顶载具装置在至少两个不同高度水平上延伸,并具有将所述高度水平相互连接的至少一个升降机,其中所述升降机具有与布置在至少两个不同高度水平处的吊顶结构几何对应的升降机吊顶结构。
101、bl.将履带式吊顶载具在吊顶结构处/从吊顶结构中悬吊/悬挂的方法,用于特别地使根据项ba至bg中的一项的履带式吊顶载具在吊顶结构处头朝前地以悬挂方式行进,其中借助于将所述吊顶载具联接到所述吊顶结构的多个悬挂元件悬挂所述吊顶载具,其中通过容纳具有不同周向形状/轮廓的第一周向轨道和第二周向轨道的至少一个驱动单元提供周向引导/驱动运动,其中所述悬挂元件在与由所述吊顶结构限定的栅格对应的预定义的第一纵向位置处附接到所述第一周向轨道,其中将所述吊顶载具悬挂为,使得当通过周向运动沿着所述周向轨道引导所述悬挂元件时,通过将所述多个悬挂元件的子集从所述吊顶结构分离或将它们联接到所述吊顶结构中,使所述吊顶载具能够沿着所述吊顶结构移动。
102、bm.根据前述方法项所述的方法,其中所述周向运动由瞬时接合所述吊顶结构的所述悬挂元件传递/传送;和/或其中所述周向运动由第一驱动单元和第二驱动单元提供,其中所述第一驱动单元提供所述悬挂元件的第一子集在第一闭环轨迹上的周向运动,所述第二驱动单元提供所述悬挂元件的第二子集在第二闭环轨迹上的周向运动;和/或其中至少一个负载/货物由被容纳在所述载具上的至少一个提升机承载。
103、bn.计算机程序,包括指令,当所述程序由计算机执行时,所述指令使计算机特别是通过控制至少一个驱动单元,在提供和控制周向引导/驱动运动的背景下,执行根据方法项bl或bm中的至少一项的方法的步骤。
104、bo.容纳具有不同周向形状/轮廓的第一周向轨道和第二周向轨道的至少一个履带式驱动单元的用途,用于悬吊/悬挂并可选地还主动驱动履带式吊顶载具,从而特别是在吊顶结构处头向前地以悬挂方式行进,特别是在根据项bl至bm中的一项的方法中用于悬吊/悬挂根据项ba至bg中的一项的履带式吊顶载具,其中借助于将所述吊顶载具联接到所述吊顶结构的多个悬挂元件悬挂所述吊顶载具,其中所述悬挂元件在与由所述吊顶结构限定的栅格相对应的预定义的第一纵向位置处附接到所述第一周向轨道,其中由所述至少一个驱动单元提供周向引导/驱动运动,使得当沿着周向轨道引导/驱动所述悬挂元件时,所述载具通过将悬挂元件的子集与所述吊顶结构分离/联接到所述吊顶结构中而沿着所述吊顶结构移动。
105、ca.履带式载具,被配置用于特别是在吊顶结构处头向前地以悬挂方式行进,其中所述载具具有:
106、-多个悬挂元件,所述多个悬挂元件被配置用于悬挂所述载具并被配置用于将所述载具联接到所述结构,
107、-至少一个第一驱动单元,所述至少一个第一驱动单元被配置用于周向运动,并容纳第一周向轨道和与所述第一周向轨道具有不同的周向形状/轮廓的第二周向轨道,其中所述悬挂元件在与预定义栅格对应的预定义第一纵向位置附接至第一周向轨道,其中所述载具被配置为用于当所述悬挂元件通过周向运动沿着两个周向轨道被引导时通过将多个悬挂元件的子集与所述结构分离或将它们联接到所述结构中而沿着所述结构移动。
108、cb.根据项ca所述的履带式载具,其中所述载具还包括:
109、-至少一个第二驱动单元,所述至少一个第二驱动单元被配置用于使得所述吊顶载具能够在至少两个空间方向,即由所述结构预定义的第一空间方向上运动和由所述至少一个第一驱动单元的引导/驱动运动限定的第二空间方向上运动,其中所述第二空间方向与所述第一空间方向正交,其中所述第二驱动单元被配置为用于使所述载具在所述第一空间方向上运动,从而提供所述载具的至少二维运动能力,其中相应的悬挂元件具有至少一个轮子,所述至少一个轮子被布置和配置为特别是在所述结构的相应/对应型材的轮子踏面上沿着所述结构被引导;
110、-至少两个可单独控制的电机,其中所述至少一个第一驱动单元和至少一个第二驱动单元连接到至少一个电机,并且其中用于所述第一驱动单元(多个)的电机和用于所述第二驱动单元的电机是不同的,从而提供所述载具的主动二维行进能力。
111、cc.根据项ca或cb所述的履带式载具,其中所述履带式载具的至少一个驱动单元被配置为用于能够实现所述悬挂元件的闭环轨迹;
112、其中所述第一周向轨道和所述第二周向轨道成形为使得所述悬挂元件仅在通过所述轨道的弯曲部分时才与所述结构分离/联接到所述结构中;
113、其中分别地,所述悬挂元件借助于第一滑轮固定地附接到/联接到所述第一周向轨道/与所述第一周向轨道附接/联接,其中所述悬挂元件经由第二滑轮被在所述第二周向轨道内引导,其中所述第一滑轮和第二滑轮所述优选地布置在相应的悬挂元件的杠杆臂处,其中所述相应的悬挂元件优选地具有l形;和/或其中每个悬挂元件具有第一滑轮和在相应的悬挂元件的杠杆臂处相对于所述第一滑轮以纵向距离布置的第二滑轮,其中所述悬挂元件经由所述第一滑轮和所述第二滑轮联接到所述第一轨道和所述第二轨道;和/或其中每个悬挂元件具有容纳/支撑由第二轨道引导的滑轮的杠杆臂,其中所述滑轮布置在所述杠杆臂的自由端,并且其中在所述轨道的线性部分中,所述杠杆臂至少大致指向驱动/行进方向;和/或其中所述悬挂元件借助于纵向连接元件,特别是通过在相应的悬挂元件的第一滑轮的轴线处连接的纵向连接元件彼此连接,从而形成在预定义栅格中彼此有距离的相互关联的悬挂元件的闭环;
114、其中所述第一周向轨道具有链或由形成连接所述悬挂元件的相互关联的链元件的闭环的链提供/限定,其中所述载具具有多个反向轴承,所述反向轴承特别地被配置和布置用于与所述吊顶结构正面地相互作用,其中所述多个反向轴承优选地联接到所述第一周向轨道/与所述第一周向轨道联接,特别是联接到所述第一周向轨道的链元件;其中所述载具具有容纳另外的周向轨道的另一第一驱动单元,其中多个另外的悬挂元件在与预定义栅格对应的预定义纵向位置附接到所述另外的周向轨道并被配置用于悬挂载具并将载具联接到所述结构,特别是使得所述载具在结构上相对于相反方向被固定,其中所述载具具有附接到所述另外的周向轨道的另外的悬挂元件,其中所述悬挂元件和瞬时接合所述结构的另外的悬挂元件相对于驱动/行进方向和其相反方向在所述结构处固定/阻挡所述载具;和/或其中所述载具具有另一驱动单元,所述另一驱动单元与第一驱动具有相同的配置,但具有另外的悬挂元件和另外的周向轨道的镜像倒置布置,其中所述另外的悬挂元件在与所述第一驱动单元的所述悬挂元件的引导方向相反的方向上被引导/驱动,特别是使得相应的悬挂元件和另外的悬挂元件两者同时与所述结构联接/从所述结构分离;
115、其中所述至少一个第一驱动单元被配置为用于在卸载状态下将相应的悬挂元件从所述结构中提升出来,特别是使得所述至少一个驱动单元为瞬时卸载的悬挂元件的子集和同时通过瞬时加载的悬挂元件的子集悬挂载具两者提供分离/联接运动学;和/或其中所述至少一个第一驱动单元具有基本平面的配置;和/或其中所述载具具有至少两个彼此平行布置的第一驱动单元;和/或其中所述周向轨道分别在的平面内以二维方式延伸被引导/驱动;和/或其中所述至少一个第一驱动单元借助于至少三个悬挂元件联接;和/或其中相应的悬挂元件具有提供两个臂的l形,所述两个臂限定了相应的悬挂元件的轮子和第一滑轮和第二滑轮的相对布置。
116、cd.根据项ca、cb或cc所述的履带式载具,其中所述第二驱动单元包括至少一个完整轮。
117、ce.根据项cd所述的履带式载具,其中所述完整轮为盘形,并包括围绕其周缘均匀分布的多个滚子。
118、cf.根据项ce所述的履带式载具,其中所述第二驱动单元包括由至少两个同轴布置的完整轮组成的完整轮组。
119、cg.根据项cf所述的履带式载具,其中所述同轴布置的完整轮各自相对于其相邻的完整轮在方位角方向上具有预定义的偏移。
120、ch.根据项cd至cg中的一项所述的履带式载具,其中所述完整轮(多个)连接到返回机构,所述返回机构向所述完整轮(多个)施加力,从而将它/它们压靠在所述结构上。
121、ci.根据项ca、cb或cc所述的履带式载具,其中所述第二驱动单元包括用于在所述第二空间方向上与限定栅格啮合的至少一个宽的伸长型齿轮。
122、cj.根据项ci所述的履带式载具,其中所述伸长型齿轮在端部锥形化。
123、ck.履带式载具装置,包括至少一个根据项ca至ch中任一项所述的履带式载具和结构,所述结构具有限定所述结构的栅格的多个型材,其中所述悬挂元件被配置为在由所述结构限定的第一空间方向上沿着所述型材被引导,所述载具的行进运动具有至少两个自由度;和/或其中所述结构具有限定所述结构的栅格多个型材,其中所述载具具有与所述悬挂元件一起将所述载具悬挂的多个另外的悬挂元件,其中所述悬挂元件和所述另外的悬挂元件相对于所述驱动/行进方向在所述结构处固定/阻挡所述载具。
124、cl.履带式载具装置,包括至少一个根据项目ci或cj的履带式载具和结构,所述结构具有多个第一型材,所述多个第一型材在第一空间方向上限定了所述结构的栅格,其中所述多个第一型材各自具有第二型材,所述第二型材在第二空间方向上限定了所述结构的栅格,其中所述悬挂元件被配置用于在由所述结构限定的所述第一空间方向上沿着所述第一型材被引导,所述载具的行进运动具有至少两个自由度,并且其中所述齿轮被配置用于与所述第二型材啮合,使得所述履带式载具能够经由至少两个可单独控制的电机和驱动单元全向移动。
125、cm.将履带式载具在结构处/从结构中悬吊/悬挂的方法,用于特别地使根据项ca至cj中的一项的履带式载具在结构处头朝前地以悬挂方式行进,其中借助于将所述载具联接到所述结构的多个悬挂元件悬挂所述载具,其中通过具有不同周向形状/轮廓的第一周向轨道和第二周向轨道限定周向引导/驱动运动,其中所述悬挂元件在与由所述结构限定的栅格对应的预定义的第一纵向位置处附接到所述第一周向轨道,其中将所述载具悬挂为,使得当通过周向运动沿着所述周向轨道引导所述悬挂元件时,通过将所述多个悬挂元件的子集从所述结构分离或将它们联接到所述结构中,使所述载具能够沿着所述结构移动,其中所述周向运动由瞬时接合所述结构的所述悬挂元件来传送/传送;和/或其中所述周向运动由第一驱动单元提供,其中至少两个电机为所述至少一个第一驱动单元和至少一个第二驱动单元提供动力,从而能够使得所述履带式载具进行主动二维行进。
126、cn.计算机程序,包括指令,当所述程序由计算机执行时,所述指令使计算机特别是通过控制连接到至少一个第一驱动单元的第一电机和控制连接到所述至少一个第二驱动单元的第二电机,在提供和控制周向引导/驱动运动的背景下,执行根据所述方法项的步骤。
127、co.容纳具有不同周向形状/轮廓的第一周向轨道和第二周向轨道的至少一个履带式驱动单元的用途,用于悬吊/悬挂并可选地主动驱动履带式载具,从而特别是经由两个电机在结构处头向前地以悬挂方式行进,特别是特别是在根据项目cm的方法中用于悬吊/悬挂根据项ca至cj中的一项的履带式载具,其中借助于多个悬挂元件悬挂所述载具,所述多个悬挂元件将载具联接到所述结构,其中所述悬挂元件在与由所述结构限定的栅格对应的预定义的第一纵向位置处附接到所述第一周向轨道,其中通过与所述至少一个驱动单元连接的所述第一电机提供周向引导/驱动运动,使得当沿着所述周向轨道引导/驱动所述悬挂元件时,通过将所述多个悬挂元件的子集从所述结构分离或将它们联接到所述结构中,使所述载具沿着所述结构移动。
128、da.根据项aa-ah、ba-bg、ca-cj中任一项所述的履带式吊顶单元,其中所述履带式吊顶单元连接到机械臂。
129、db.将根据项aa-ah、ba-bg、ca-cj或da中任一项所述至少一个履带式吊顶单元用于以下应用中的至少一种的用途:医疗保健、物流、生产、组装、维护、运输、娱乐、建筑。
本文地址:https://www.jishuxx.com/zhuanli/20241204/341353.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表