用于自动储存系统的网格上的车辆的本地定位系统的制作方法
- 国知局
- 2024-12-06 13:10:53
本发明涉及一种用于储存和取出容器的自动储存和取出系统,具体地涉及一种用于通过对由丢失的容器搬运车辆发送或接收的信号强度进行三角测量来定位丢失的容器搬运车辆的系统和方法。
背景技术:
1、图1公开了一种常见现有技术的具有框架结构100的自动储存和取出系统1,并且图2、图3和图4公开了适于在这样的系统1上运行的三种不同的现有技术的容器搬运车辆201、301、401。
2、框架结构100包括直立构件102和储存容积部,该储存容积部包括在直立构件102之间成排布置的储存列105。在这些储存列105中,储存容器106(也称为箱)一个堆叠在另一个顶部上以形成堆垛107。构件102通常可以由金属(例如,挤压铝型材)制成。
3、自动储存和取出系统1的框架结构100包括横跨框架结构100的顶部布置的轨道系统108,多个容器搬运车辆201、301、401可以在该轨道系统108上运行,以从储存列105升起储存容器106以及将储存容器106降低到该储存列中,并且还在储存列105上方运输储存容器106。轨道系统108包括:第一组平行轨道110,布置成引导容器搬运车辆201、301、401横跨框架结构100的顶部在第一方向x上的移动;以及第二组平行轨道111,布置成垂直于第一组轨道110,以引导容器搬运车辆201、301、401在垂直于第一方向x的第二方向y上的移动。储存在列105中的容器106由容器搬运车辆201、301、401通过轨道系统108中的存取开口112来存取。容器搬运车辆201、301、401可以在储存列105上方侧向地(即,在与水平x-y平面平行的平面中)移动。
4、框架结构100的直立构件102可以用于在从列105中升起容器和将容器降低到该列中的期间引导储存容器。容器106的堆垛107通常是自支撑的。
5、每个现有技术的容器搬运车辆201、301、401包括车身201a、301a、401a以及第一组车轮和第二组车轮201b、301b、201c、301c、401b、401c,这些车轮使容器搬运车辆201、301、401能够分别在x方向和y方向上侧向移动。在图2、图3和图4中,每组中的两个车轮是完全可见的。第一组车轮201b、301b、401b布置成与第一组轨道110中的两个相邻的轨道接合,并且第二组车轮201c、301c、401c布置成与第二组轨道111中的两个相邻的轨道接合。这些组车轮201b、301b、201c、301c、401b、401c中的至少一组可以被提升和降低,使得第一组车轮201b、301b、401b和/或第二组车轮201c、301c、401c可以在任何时间与相应的一组轨道110、111接合。
6、每个现有技术的容器搬运车辆201、301、401还包括用于竖直地运输储存容器106(例如,从储存列105中升起储存容器106和将储存容器106降低到该储存列中)的升降装置。升降装置包括一个或多个夹持/接合装置,该一个或多个夹持/接合装置适于接合储存容器106,并且夹持/接合装置可以从车辆201、301、401降低,使得可以在与第一方向x和第二方向y正交的第三方向z上调整夹持/接合装置相对于车辆201、301、401的位置。容器搬运车辆301、401的夹持装置的部分在图3和图4中示出、用附图标记304、404指示。容器搬运装置201的夹持装置位于图2中的车身201a内。
7、常规地,并且还出于本技术的目的,z=1标识轨道系统108下方的储存容器的最上层(即,在该轨道系统紧下方的层),z=2标识轨道系统108下方的第二层,z=3标识第三层等。在图1中公开的示例性现有技术中,z=8标识储存容器的最下面的底层。类似地,x=1……n和y=1……n标识每个储存列105在水平平面中的位置。因此,作为实例,并且使用图1所示的笛卡尔坐标系x,y,z,可以认为在图1中标识为106’的储存容器占据了储存位置x=10,y=2,z=3。可以认为容器搬运车辆201、301、401在z=0层中行驶,并且每个储存列105可以通过其x坐标和y坐标来标识。因此,也可以认为图1所示的在轨道系统108上方延伸的储存容器布置在z=0层中。
8、框架结构100的储存容积部通常被称为网格104,其中该网格内的可能的储存位置被称为储存单元。每个储存列可以通过x方向和y方向上的位置来标识,而每个储存单元可以通过x方向、y方向和z方向上的容器编号来标识。
9、每个现有技术的容器搬运车辆201、301、401包括储存隔间或空间,当横跨轨道系统108运输储存容器106时,该储存隔间或空间用于接收和装载储存容器106。储存空间可以包括在内部布置在车身201a内的腔体,如图2和图4所示,并且如在例如wo2015/193278a1和wo2019/206487a1中所描述的。
10、图3示出了具有悬臂结构的容器搬运车辆301的替代构造。例如,在no317366中详细描述了这样的车辆。
11、图2所示的腔式容器搬运车辆201可以具有覆盖在x方向和y方向上的尺寸的区域的覆盖区,其通常等于储存列105的侧向范围,例如如wo2015/193278a1中所描述的。本文中所使用的术语“侧向的”可以意指“水平的”。
12、替代地,腔式容器搬运车辆401可以具有大于由储存列105限定的侧向区域的占地面积,如图1和图4所示并且例如如在wo2014/090684a1或wo2019/206487 a1中所公开的。
13、轨道系统108通常包括具有凹槽的轨道,车辆的车轮在凹槽中行驶。替代地,轨道可以包括向上伸出的元件,其中车辆的车轮包括凸缘以防止脱轨。这些凹槽和向上伸出的元件统称为导轨。每个轨道可以包括一个导轨,或者每个轨道可以包括两个平行的导轨。
14、wo2018/146304a1(其内容通过引证并入本文)说明了轨道系统108的常见构造,该轨道系统包括在x方向和y方向两者上的轨道和平行的导轨。
15、在框架结构100中,大多数列105是储存列105,即,在其中将储存容器106储存成堆垛107的列105。然而,一些列105可以具有其他目的。在图1中,列119和120是由容器搬运车辆201、301、401用来卸载和/或拾取储存容器106的这样的专用列,使得可以将储存容器运输到存取站(未示出),在该存取站,可以从框架结构100的外部存取储存容器106或将储存容器移进或移出框架结构100。在本领域内,这样的位置通常称为‘端口’,并且端口所在的列可以被称为‘端口列’119、120。运输到存取站可以是在任何方向上,即水平的、倾斜的和/或竖直的。例如,储存容器106可以放置在框架结构100内的随机或专用列105中,然后由任何容器搬运车辆拾取并运输到端口列119、120,以进一步运输到存取站。注意,术语“倾斜的”意指储存容器106的运输具有在水平与竖直之间的某个方向的总体运输取向。
16、在图1中,第一端口列119可以例如是专用的卸载端口列,在该卸载端口列中,容器搬运车辆201、301可以将待运输到存取站或转移站的储存容器106卸载,并且第二端口列120可以是专用的拾取端口列,在该专用的拾取端口列中,容器搬运车辆201、301、401可以拾取已经从存取站或转移站运输来的储存容器106。
17、存取站通常可以是从储存容器106中移除产品物品或将产品物品定位到储存容器中的拾取站或库存站。在拾取站或库存站中,储存容器106通常不从自动储存和取出系统1移除,而是在存取后会再次返回到框架结构100中。端口也可以用于将储存容器转移到另一储存设施(例如,到另一框架结构或另一自动储存和取出系统)、到运输车辆(例如,火车或货车)、或者到生产设施。
18、通常采用包括传送机的传送机系统来在端口列119、120与存取站之间运输储存容器。
19、如果端口列119、120和存取站位于不同的高度处,则传送机系统可以包括具有竖直部件的升降装置,以用于在端口列119、120与存取站之间竖直地运输储存容器106。
20、传送机系统可以布置成在不同的框架结构之间转移储存容器106,例如如wo2014/075937a1中所描述的,其内容通过引证并入本文。
21、当要存取储存在图1中公开的多个列105中的一个列中的储存容器106时,指示多个容器搬运车辆201、301、401中的一个容器搬运车辆从目标储存容器106的位置取出该目标储存容器并将其运输到卸载端口列119。该操作涉及将容器搬运车辆201、301移动到目标储存容器106所在的储存列105上方的位置,使用容器搬运车辆201、301、401的升降装置(未示出)从储存列105取出储存容器106,并将储存容器106运输到卸载端口列119。如果目标储存容器106位于堆垛107的深处,即,一个或多个其他储存容器106定位在目标储存容器106上方,则该操作还涉及在从储存列105中提升目标储存容器106之前临时移动定位在上方的储存容器。该步骤(在本领域内有时被称为“挖掘”)可以采用随后用于将目标储存容器运输到卸载端口列119的同一容器搬运车辆来执行,或者采用一个或多个其他协作的容器搬运车辆来执行。替代地或另外地,自动储存和取出系统1可以具有专门用于临时从储存列105移除储存容器106的任务的容器搬运车辆201、301、401。在已经将目标储存容器106从储存列105移除之后,可以将临时移除的储存容器106重新定位到初始储存列105中。然而,替代地,可以将移除的储存容器106重新定位到其他储存列105。
22、当要将储存容器106储存在多个列105中的一个列中时,指示多个容器搬运车辆201、301、401中的一个容器搬运车辆从拾取端口列120拾取储存容器106并将其运输到储存列105上方将储存该储存容器的位置。在已经移除了定位在堆垛107内的目标位置处或目标位置上方的任何储存容器106之后,容器搬运车辆201、301、401将储存容器106定位在期望位置处。然后,可以将移除的储存容器106降低放回到储存列105中,或重新定位到其他储存列105。
23、为了监视和控制自动储存和取出系统1,例如监视和控制各个储存容器106在框架结构100内的位置、每个储存容器106的内容物以及容器搬运车辆201、301、401的移动,使得可以在期望时间将期望的储存容器106运送到期望位置处,而不会使容器搬运车辆201、301、401相互碰撞,自动储存和取出系统1包括控制系统500,该控制系统通常被计算机化并且通常包括用于跟踪储存容器106的数据库。
24、容器搬运车辆在网格上发生故障的原因有多种。一种是用户错误,其中用户在物理上或在逻辑上人工移动容器搬运车辆,导致逻辑位置不再与实际位置匹配。这是容器搬运车辆碰撞的常见原因。此外,容器搬运车辆在容器搬运车辆无法在网格上确定其位置时会出现错误。例如皮带断裂或其他问题。这也会导致碰撞,因为我们只封锁了系统认为容器搬运车辆在逻辑上所处的区域。
25、wo2019238697a1描述了一种储存系统,该储存系统在该储存系统的较低高度处设置有转移区段,其中容器转移车辆在转移楼层的地板上运行,以将储存容器从储存系统运载并转移到储存系统外部的第二位置。该系统采用引导系统来引导地板上的容器转移车辆。
26、ep3081511a2涉及仓库设施中的自主运输车辆。提供了带有搁板和支撑指状件的竖直升降机。车辆设置有传感器和支撑臂,传感器和支撑臂沿着隔板对准,以确定车辆的位置。
27、us2018143312a1涉及基于由车辆传输和接收的超宽带信号来确定建筑物中的自主车辆的位置。
28、us2020104790a1描述了一种具有传感器设备的仓库设施,该传感器设备设置有用于跟踪容器的rfid标签。此外,描述了在设施中运行的运载车辆的带有地理位置标签的识别数据,以记录运载车辆的到达时间。
29、目前,从容器搬运车辆脱离位置到系统能够理解该情况并阻止其他容器搬运车辆过于靠近该容器搬运车辆之间存在延迟。
30、目前,定位丢失的容器搬运车辆最常用的解决方案是关停整个网格,同时让人员在网格上操作,定位并移动丢失的容器搬运车辆。这种解决方案成本高昂、耗费时间、并且对于在网格上操做的人员来说是危险的。
技术实现思路
1、在独立权利要求中阐述并表征了本发明,而从属权利要求描述了本发明的其他特性。
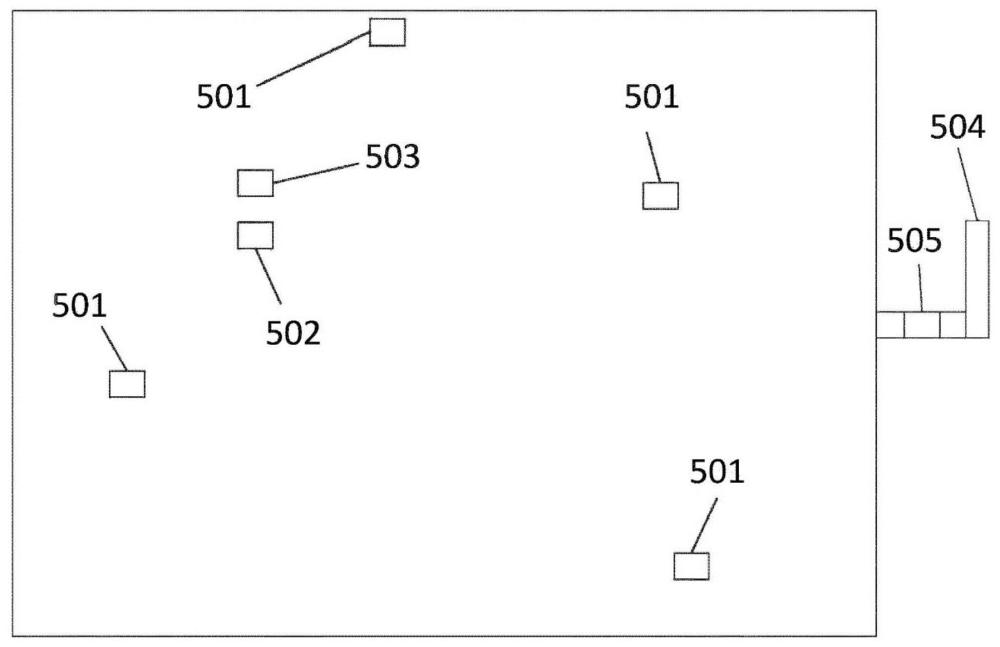
2、在一个方面中,本发明涉及一种用于计算容器搬运车辆在自动储存和取出系统的网格上的物理定位的系统,其中,自动储存和取出系统包括框架结构,该框架结构包括轨道系统,该轨道系统包括第一组平行轨道和第二组平行轨道,该第一组平行轨道布置成引导容器搬运车辆横跨框架结构的顶部在第一方向(x)上的移动,该第二组平行轨道布置成垂直于第一组轨道以引导该容器搬运车辆在垂直于第一方向(x)的第二方向(y)上的移动,第一组平行轨道和第二组平行轨道将轨道系统划分成多个网格单元,框架结构包括直立构件,该直立构件限定用于将容器储存在框架结构内的储存列,其中,该自动储存和取出系统包括配置成在轨道系统上运行的容器搬运车辆并包括无线通信系统,该无线通信系统用于在中央计算机系统与容器搬运车辆之间以及在多个容器搬运车辆之间传送指令和信息,其中,无线通信系统包括定位在网格上或网格周围的已知位置处的多个收发器以及定位在网格上的未知位置处的收发器,并且利用定位在网格上或网格周围的已知位置处的多个收发器与定位在网格上的未知位置处的收发器之间发送的信号来计算信号的发送器与信号的接收器之间的距离。
3、可以定位在网格上或网格周围的已知位置处的多个收发器是无线通信系统中的接入点,定位在网格或网格周围的已知位置处的多个收发器可以是容器搬运车辆上的无线通信设备。
4、信号的发送器可以是定位在网格上的未知位置处的收发器,并且信号的接收器可以是定位在网格上或网格周围的已知位置处的多个收发器;此外,信号的发送器可以是定位在网格上或网格周围的已知位置处的多个收发器,并且信号的接收器可以是定位在网格上的未知位置处的收发器。
5、无线通信系统可以是wi-fi网络,进一步地,信号的接收器可以测量接收信号强度指示(rssi),以计算距信号的发送器的距离,信号的发送器利用不同的信号强度进行扫描。信号是表示信号的强度的消息的形式。收发器可以是激光的发射器和接收器,收发器也可以是超声信号的发射器和接收器。无线通信系统可以是短距离无线电通信系统。
6、在第二方面中,本发明涉及一种用于计算容器搬运车辆在自动储存和取出系统的网格上的物理定位的方法,其中,自动储存和取出系统包括框架结构,该框架结构包括轨道系统,该轨道系统包括第一组平行轨道和第二组平行轨道,该第一组平行轨道布置成引导容器搬运车辆横跨框架结构的顶部在第一方向(x)上的移动,该第二组平行轨道布置成垂直于第一组轨道以引导该容器搬运车辆在垂直于第一方向(x)的第二方向(y)上的移动,第一组平行轨道和第二组平行轨道将轨道系统划分成多个网格单元,框架结构包括直立构件,该直立构件限定用于将容器储存在框架结构内的储存列,其中,该自动储存和取出系统包括配置成在轨道系统上运行的至少一个容器搬运车辆并包括无线通信系统,该无线通信系统用于在中央计算机系统与容器搬运车辆之间以及在多个容器搬运车辆之间传送指令和信息,其中,该方法包括以下步骤:利用在网格上或网格周围的已知位置处的多个收发器来发送或接收已知强度的信号;利用在网格上的未知位置处的收发器来接收或发送已知强度的信号;测量接收到的信号的强度以计算距发送器的距离;以及利用多个距离计算的测量结果来确定在网格上的未知位置处的收发器的位置。
7、发射器可以发送具有不同的信号强度的信号扫描。
8、此外,从定位在网格上的未知位置处的收发器发送信号,并且在定位在网格上或网格周围的已知位置处的多个收发器上接收信号。
9、此外,从定位在网格上或网格周围的已知位置处的多个收发器发送信号,并且在定位在网格上的未知位置处的收发器上接收信号。
10、此外,该系统可以利用测量到的接收信号强度指示(rssi)来计算距信号的发送器的距离。
11、通过使用该系统和该方法,可以快速定位丢失的容器搬运车辆,而无需关停大部分网格,并且最重要的是不会危及任何人员的健康。
本文地址:https://www.jishuxx.com/zhuanli/20241204/343386.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表