一种无人机的模型地面试验装置及应用其的试验方法
- 国知局
- 2024-12-26 16:07:11
本发明涉及多旋翼无人机试验和测试,具体涉及一种无人机的模型地面试验装置及应用其的试验方法。
背景技术:
1、多旋翼无人机设计过程中需要实际飞行中升力、阻力、螺旋桨力效、螺旋桨电机转换效率等性能参数辅助设计。但由于实际飞行环境复杂,因此风洞试验、台架试验、cfd仿真试验等传统试验方法无法获得准确的上述参数。此外由于测量装备体积和质量普遍较大,实际飞行中无法额外搭载测量装备测量上述参数,即便强行搭载测量装备进行飞行实验,因为测量装备的自身重量和体积,也会导致测量结果不够准确。因此实际飞行中升力、阻力、螺旋桨力效、螺旋桨电机转换效率等性能参数的测量是目前待解决的难题,目前没有能够准确获得这些性能参数的实验方法及配套设备,基本只能寄希望于理论计算获得。
2、另外,随着人们对于飞行器研究的不断深入,各种型号的特殊飞行器不断问世,各种新的飞行器更需要通过试验准确及时地获得相应的飞行器性能参数。
3、基于上述问题,本发明人对多旋翼无人机的测试方法做了深入分析,以期待设计出一种能够解决上述问题的,能够获得飞行器性能参数的试验装置及方法,并且是能够准确、快速、便捷地获得飞行器性能参数的无人机的模型地面试验装置及应用其的试验方法。
技术实现思路
1、为了克服上述问题,本发明人进行了锐意研究,设计出一种无人机的模型地面试验装置及应用其的试验方法,该装置及方法中通过可驾驶移动的测试车辆搭载无人机,在无人机上布置多个传感器,从而模拟获得无人机飞行时的升力、阻力、螺旋桨扭矩、电机电压电流,进而推导得到力效、转化效率、功率、航时、航程等参数信息,为无人机的迭代设计、飞行实验提供数据支撑,从而完成本发明。
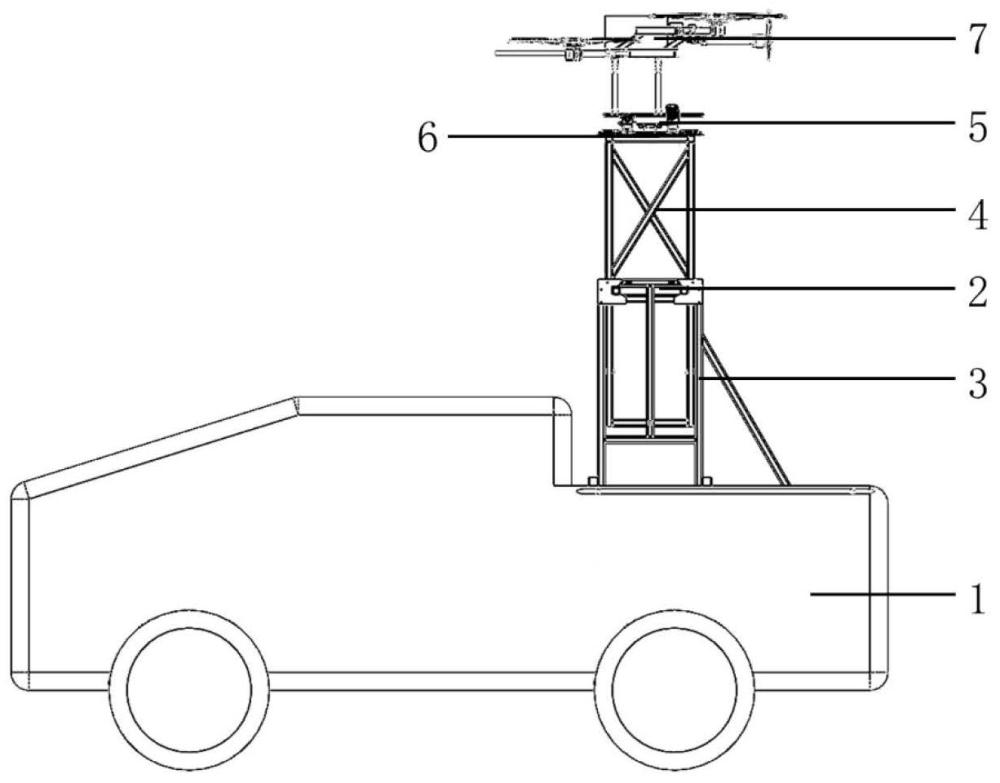
2、具体来说,本发明的目的在于提供一种无人机的模型地面试验装置,该装置包括可驾驶移动的测试车辆1,在所述测试车辆1上设置有支撑架2,在所述支撑架2上设置有测试平台5;
3、所述支撑架2为可伸缩支架;
4、在所述测试平台5上安装待试验的无人机7。
5、其中,所述测试平台5上设置有两条彼此平行设置的滑轨9;所述滑轨9的长度方向与测试车辆1的行进方向一致,
6、在所述滑轨9上设置有能够沿其长度方向往复滑动的滑块10,
7、在所述滑块10上安装有拉力传感器11,通过该拉力传感器11测量无人机升力;
8、所述测试平台5上还设置有角度调节装置13,通过该角度调节装置13调节无人机平面与水平面夹角,模拟实际飞行中无人机的俯仰角;
9、所述无人机安装在所述角度调节装置13上。
10、其中,所述角度调节装置13设置有两个,在每条滑轨9上设置有一个所述角度调节装置13;
11、所述角度调节装置13通过拉力传感器11与滑块10相连,在每个所述角度调节装置13下方对应设置有两个拉力传感器11和两个滑块10。
12、其中,在所述两个角度调节装置13之间连接有前连杆14和后连杆15;两个角度调节装置13与前连杆14、后连杆15同步移动;
13、在所述测试平台5上,在前连杆14和后连杆15之间还设置有六自由度力传感器8。
14、其中,在所述测试平台5上安装有放大器16和数据采集器17,所述放大器16用于放大传感器的电压信号,所述数据采集器17用于采集放大器16的电压信号并转换为数字信号传输到计算机终端。
15、其中,所述无人机7包括机身23,在所述机身上设置有主螺旋桨20、主螺旋桨电机21和主螺旋桨电机支座22;
16、其中,在主螺旋桨电机21和主螺旋桨电机支座22之间设置有拉扭传感器27;
17、优选地,在所述无人机7上还任选地设置有尾推螺旋桨24、尾推螺旋桨电机25和尾推螺旋桨电机支座26;
18、相应地,在尾推螺旋桨电机25和尾推螺旋桨电机支座26之间设置有拉扭传感器27。
19、其中,在所述无人机7上还设置有转速传感器28、电压电流传感器29、飞行控制器30和电池31;
20、其中,所述转速传感器28用于主螺旋桨电机21和尾推螺旋桨24的转速;
21、所述电压电流传感器29用于测量输入主螺旋桨电机21和尾推螺旋桨电机25的电压、电流;
22、所述飞行控制器30用于给电机提供控制信号,所述电池31用于给无人机7供电。
23、其中,在所述无人机7重心的正前方安装有空速管19;通过该空速管19测量无人机前方来流速度。
24、本发明还提供一种多旋翼无人机的试验方法,该方法通过上文所述的无人机的模型地面试验装置实现。
25、其中,该方法包括如下步骤:
26、步骤1,调取待试验无人机在实际飞行试验过程中的螺旋桨电机pwm信号、飞行速度及俯仰角;并将螺旋桨电机pwm信号输入到飞行控制器30中;
27、步骤2,调整角度调节装置13,使得无人机的俯仰角与实际飞行试验过程中的俯仰角一致;
28、步骤3,控制测试车辆1按照设定的速度匀速行驶;
29、步骤4,采集拉力传感器11、拉扭传感器27、转速传感器28、电压电流传感器29、空速管19的数据并记录。
30、本发明所具有的有益效果包括:
31、(1)根据本发明提供的无人机的模型地面试验装置及应用其的试验方法,能够模拟多旋翼无人机实际飞行,降低设计初期由于可靠性低造成的无人机意外损毁,试验安全性高;
32、(2)根据本发明提供的无人机的模型地面试验装置及应用其的试验方法,通过模拟多旋翼无人机实际飞行,可准确预测多旋翼无人机实际飞行中升力、阻力、螺旋桨力效、螺旋桨电机转换效率等性能参数,为多旋翼无人机设计提供依据。
技术特征:1.一种无人机的模型地面试验装置,其特征在于,该装置包括可驾驶移动的测试车辆(1),在所述测试车辆(1)上设置有支撑架(2),在所述支撑架(2)上设置有测试平台(5);
2.根据权利要求1所述的无人机的模型地面试验装置,其特征在于,
3.根据权利要求2所述的无人机的模型地面试验装置,其特征在于,
4.根据权利要求3所述的无人机的模型地面试验装置,其特征在于,
5.根据权利要求2所述的无人机的模型地面试验装置,其特征在于,
6.根据权利要求1所述的无人机的模型地面试验装置,其特征在于,
7.根据权利要求6所述的无人机的模型地面试验装置,其特征在于,
8.根据权利要求6所述的无人机的模型地面试验装置,其特征在于,
9.一种多旋翼无人机的试验方法,其特征在于,该方法通过权利要求1-8之一所述的无人机的模型地面试验装置实现。
10.根据权利要求9所述的多旋翼无人机的试验方法,其特征在于,
技术总结本发明公开了一种无人机的模型地面试验装置及应用其的试验方法,该装置及方法中通过可驾驶移动的测试车辆搭载无人机,在无人机上布置多个传感器,从而模拟获得无人机飞行时的升力、阻力、螺旋桨扭矩、电机电压电流,进而推导得到力效、转化效率、功率、航时、航程等参数信息,为无人机的迭代设计和飞行实验提供数据支撑。技术研发人员:宋韬,陈柏健,贺红卫,叶建川,刘浩,邓怡星,叶思宏,吴则良,郭涵宇受保护的技术使用者:北京理工大学技术研发日:技术公布日:2024/12/12本文地址:https://www.jishuxx.com/zhuanli/20241216/348214.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种无人机飞行防撞装置
下一篇
返回列表