机械传动机构的制作方法
- 国知局
- 2024-12-26 16:41:26
本技术涉及一种机械机构,具体涉及一种机械传动机构。
背景技术:
1、减速器作为机械传动领域的基本功能单元,应用广泛。尤其在工业机器人、服务机器人和人形机器人等领域的需求驱动下,结构紧凑、速比范围宽且承载能强的精密减速器,形成了目前以rv减速器、谐波减速器和精密行星减速器为主的关节驱动应用场景下的产品格局。
2、但是,这三种减速器皆因各自的缺陷而应用场合受限。其中,rv减速器的刚性大但结构和制作工艺复杂且成本高,主要应用在需要高承载力和高抗冲击力的场合;谐波减速器的结构紧凑但承载力和使用寿命偏低,主要应用在低负载的场合;精密行星减速器的传动效率高但单级速比低,主要应用在大功率传动场合。
3、以机器人为例,由于现有的减速器应用场合受限,不同关节需要采用不同的减速器,由此导致机器人整机的产品设计难度高、供应链复杂。
4、在现有的减速器中,圆柱和圆锥齿轮减速器需要通过增加传动级数才能实现较大的传动比,因其体积重量大,难以应用在追求轻质重载的关节驱动上。行星减速器可以通过复杂的多级结构实现高传动比,但设计上较有困难,比如nw型行星减速器需要用到工艺性欠佳的双联齿轮。还有一种通过齿差实现差动的减速器,虽然具有结构简单、传动比高的特点,但因行星轮的偏心运动往往仅适用于低速的场合。
5、近些年出现了通过齿差实现大传动比的新型减速器。例如,中国实用新型专利文献cn115875409a公开了一种具有大传动比行星齿轮减速器的结构、传动比的计算和参数确定方法,其具体公开了一种镜像差动行星齿轮减速器(mirror differential planetarygear reducer),通过两组行星传动实现高传动比,但也存在设计困难、使用双联太阳轮和结构复杂的问题。
6、中国实用新型专利文献cn109764108a公开了一种混合锥齿差速减速机构,其采用变位混合锥齿差减速法,实现了基于混合锥齿轮的高传动比减速器。但是,该机构不仅存在混合锥齿轮的制造装配困难,精度难以保证的问题,而且整体结构也非常复杂,会导致体积重量大和精度偏低而难以应用在关节驱动中。
7、面齿轮因其可实现高性能的传动,近些年越来越受到关注进而被应用于减速器和变速器的结构中。日本实用新型专利文献jp6420097b2公开了一种面齿轮减速机,其采用双联同轴面齿轮分别与不同的圆柱齿轮啮合实现了具有轴交角的一级减速和变速。但是,由于其仅有一级变速,因此传动比受面齿轮的尺寸限制而不够大。日本实用新型专利文献jp6484014b2公开了一种多级齿轮减速器,其采用面齿轮作为多级传动的第一级,而这仅是面齿轮传动的常规应用。中国实用新型专利文献cn104633022b公开了一种行星式多级变速传动方法及装置,其采用多个同轴面齿轮同时与行星布置的圆柱齿轮啮合,以实现变速传动。由于每个面齿轮都是单级传动,所能实现的传动比同样受面齿轮的尺寸限制而有限,仅用作变速器。
8、中国实用新型专利文献cn112503143b公开了一种变位混合锥齿轮差速减速法,采用两个对置且齿数不等的非同轴面齿轮与圆柱齿轮啮合,再通过内啮合圆柱齿轮补偿两面齿轮轴线偏心距,并最终通过锥齿轮差速装置实现齿差传动,结构复杂,设计和制作困难,成本重量精度等难以控制,同样不适合用在关节驱动上。
9、综上所述,目前尚缺乏一种能够适配机器人的所有关节的大传动比减速器。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种机械传动机构,它可以实现宽范围的传动比,从而适配机器人的所有关节的应用需求。
2、为解决上述技术问题,本实用新型机械传动机构的技术解决方案为:
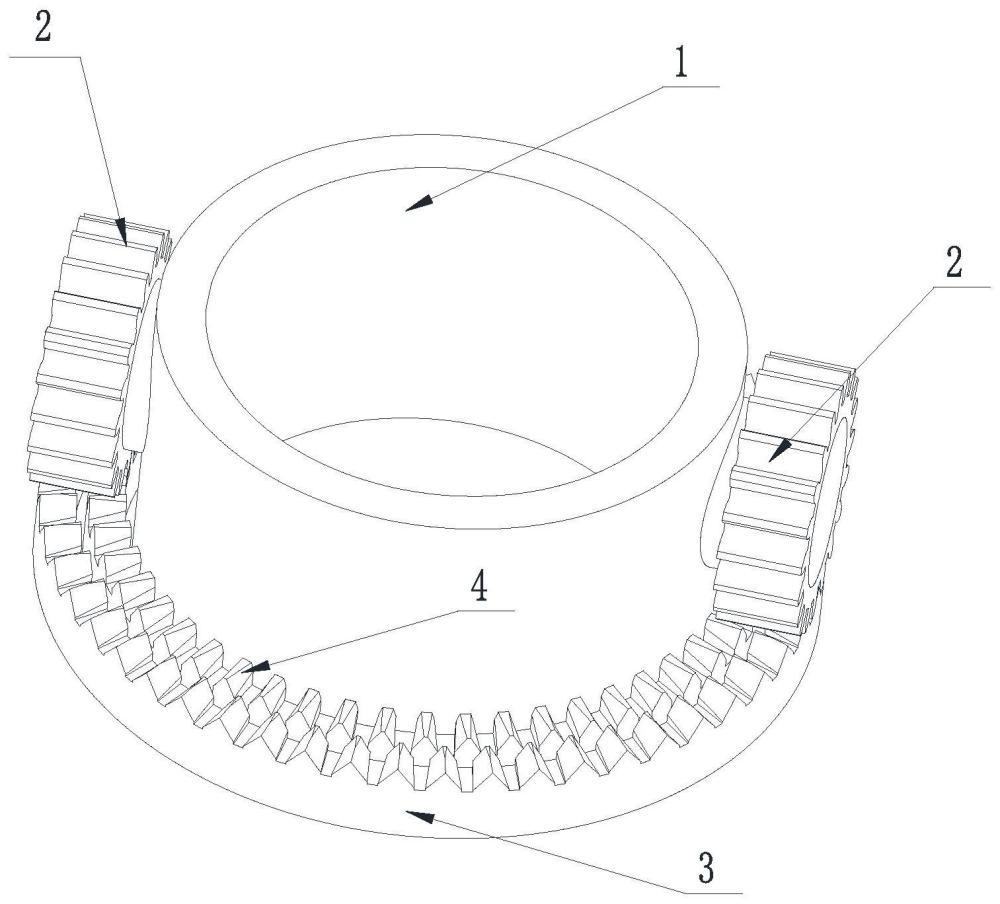
3、包括行星架、至少一个行星圆柱齿轮以及同轴设置的固定面齿轮和非固定面齿轮,行星架能够绕其轴线旋转;行星圆柱齿轮连接所述行星架;行星圆柱齿轮偏离所述行星架的轴线;固定面齿轮和非固定面齿轮与所述行星圆柱齿轮同时啮合;所述固定面齿轮与非固定面齿轮的齿数不同,从而形成齿数差。
4、在另一实施例中,所述行星架与输入轴固定连接,输入轴能够带动行星架绕其回转轴线旋转;所述非固定面齿轮与输出轴固定连接;
5、在另一实施例中,所述非固定面齿轮与输入轴固定连接,输入轴能够带动非固定面齿轮绕其回转轴线旋转;所述行星架与输出轴固定连接。
6、在另一实施例中,所述行星圆柱齿轮为两个以上;各行星圆柱齿轮沿行星架的周向均布。
7、在另一实施例中,所述固定面齿轮和非固定面齿轮的直径大于行星架的直径,则固定面齿轮和非固定面齿轮以及行星圆柱齿轮均设置于行星架的外部;
8、在另一实施例中,固定面齿轮和非固定面齿轮的直径小于行星架的直径,则固定面齿轮和非固定面齿轮以及行星圆柱齿轮均设置于行星架的内腔。
9、在另一实施例中,所述固定面齿轮的齿数大于所述非固定面齿轮的齿数;或者,所述固定面齿轮的齿数小于所述非固定面齿轮的齿数。
10、在另一实施例中,所述固定面齿轮设置于非固定面齿轮的径向外侧;或者,固定面齿轮设置于非固定面齿轮的径向内侧。
11、在另一实施例中,所述固定面齿轮和非固定面齿轮的回转轴线与行星架的回转轴线共线。
12、在另一实施例中,所述行星圆柱齿轮的个数不大于固定面齿轮和非固定面齿轮之间的齿差数。
13、在另一实施例中,所述行星圆柱齿轮的轴向沿行星架的径向延伸。
14、在另一实施例中,所述固定面齿轮和非固定面齿轮以相同的轴交角与行星圆柱齿轮相啮合。
15、在另一实施例中,所述行星架为空心结构。
16、在另一实施例中,所述行星圆柱齿轮在固定面齿轮的齿面上每滚动一周,带动非固定面齿轮以及输出轴转过一角度;该角度的大小为非固定面齿轮上,连续个与非固定面齿轮与固定面齿轮的齿数差等个数的轮齿所对应的角度。
17、在另一实施例中,所述行星架与输入轴固定连接,所述非固定面齿轮与输出轴固定连接;所述输入轴与输出轴之间的传动比iho为:
18、
19、其中,nh为行星架的转速,也即输入轴的转速;
20、no为非固定面齿轮的转速,也即输出轴的转速;
21、zo为非固定面齿轮的齿数;
22、zs为固定面齿轮的齿数。
23、在另一实施例中,所述非固定面齿轮与输入轴固定连接,所述行星架与输出轴固定连接;所述输入轴与输出轴之间的传动比iih为:
24、
25、其中,nh为行星架的转速,也即输出轴的转速;
26、ni为非固定面齿轮的转速,也即输入轴的转速;
27、zi为非固定面齿轮的齿数;
28、zs为固定面齿轮的齿数。
29、本实用新型可以达到的技术效果是:
30、本实用新型的传动比由非固定面齿轮的齿数以及非固定面齿轮与固定面齿轮的齿数差决定,因此能够实现高传动比的机械传动。
31、本实用新型以普通的圆柱齿轮作为行星轮,以两个同轴设置且齿数不等的面齿轮与该行星轮同时啮合,利用齿差传动实现减速。本实用新型不仅保留了面齿轮传动的所有优点,而且结构简单,便于设计、制作和装配,容易实现具有高精度、高承载力和高寿命的精密减速器产品,特别适用于机器人的关节驱动。
32、本实用新型利用具有齿数差的两个面齿轮,固定面齿轮行星圆柱齿轮能够在公转的同时实现自转,行星圆柱齿轮在公转和自转的行星运动过程中能够对非固定面齿轮的啮合齿面产生驱动力,从而实现力和力矩的传递,带动非固定面齿轮及与其连接的轴出轴转动。
33、本实用新型可以做为减速装置。本实用新型的传动比由非固定面齿轮的齿数以及非固定面齿轮与固定面齿轮的齿数差决定,与现有的减速器相比,本实用新型的传动比与行星圆柱齿轮无关,因此能够在相同外圈面齿轮尺寸的条件下任意确定合适的减速比。当然,本实用新型也可以做为增速装置。
34、本实用新型可以做为精密减速器,采用面齿轮传动,齿数等参数设计自由度高、传动效率高、性价比高,可应用于机器人关节驱动、智能装备等领域。由于面齿轮传动是一种渐开线圆柱齿轮与面齿轮相啮合的新型相交轴传动方式,相比常规的锥齿轮传动,采用面齿轮的传动系统具有体积小、重量轻、噪声低、承载能力高、可靠性高、寿命长等许多优点,而两个齿数不同的面齿轮之间能够齿差传动,因此能够实现宽范围的传动比。
35、本实用新型能够解决现有的精密减速器技术中rv减速器的结构复杂、工艺难度大、成本高的问题,以及谐波减速器的柔性齿轮承载力和寿命受限的问题,还解决了行星减速器传动比偏小的问题。
本文地址:https://www.jishuxx.com/zhuanli/20241216/350912.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表