一种可浮沉的仿生魟鱼机器人
- 国知局
- 2024-12-26 15:54:06
本技术属于仿生机器人,具体涉及一种可浮沉的仿生魟鱼机器人。
背景技术:
1、近年来,人们从丰富多彩的鱼类身上获得灵感,将它们的运动机理和行为方式运用到对水下机器人运动机理和控制的研究中,以提高水下机器人的推进效率和速度。随着海洋开发事业的发展,一般水中技术己无法适应各种综合考察和研究并完成多种复杂条件下作业的需要,水下机器人在海洋科学考察、水下工程( 包括探矿、采矿)、打捞救助和军事活动等许多领域显露出广阔的应用前景和巨大的潜在价值。
2、但是,目前的仿生机器鱼在需要上浮时,是依靠其仿生鱼鳍的摆动来实现上浮运动。而且目前的一些水下潜器,如潜水艇等,都是依靠吸、排水的原理实现下沉、上浮的运动。在自然界中大部分鱼的浮沉运动则是依靠通过鱼鳔来实现,鱼鳔是鱼身体比重的调节器官,当鱼鳔体积变大,鱼身体的体积也随之增大,导致其受到的浮力变大,此时鱼可以完成上浮运动;当鱼鳔体积变小,鱼身体的体积也随之变小,导致其受到的浮力变小,此时鱼可以完成下沉运动。因此,目前的仿生机器鱼在进行浮沉运动时,其仿生效果较差;且依靠电机驱动仿生鱼鳍实现上浮或通过泵的吸、排水实现浮沉运动的方法,其能耗高、噪声大、隐蔽性差,并且对仿生机器鱼结构的紧凑性造成了一定的影响,导致其机身笨重。
技术实现思路
1、为了解决上述技术问题,本实用新型提供了一种可浮沉的仿生魟鱼机器人。
2、本实用新型的一种可浮沉的仿生魟鱼机器人的技术方案是:
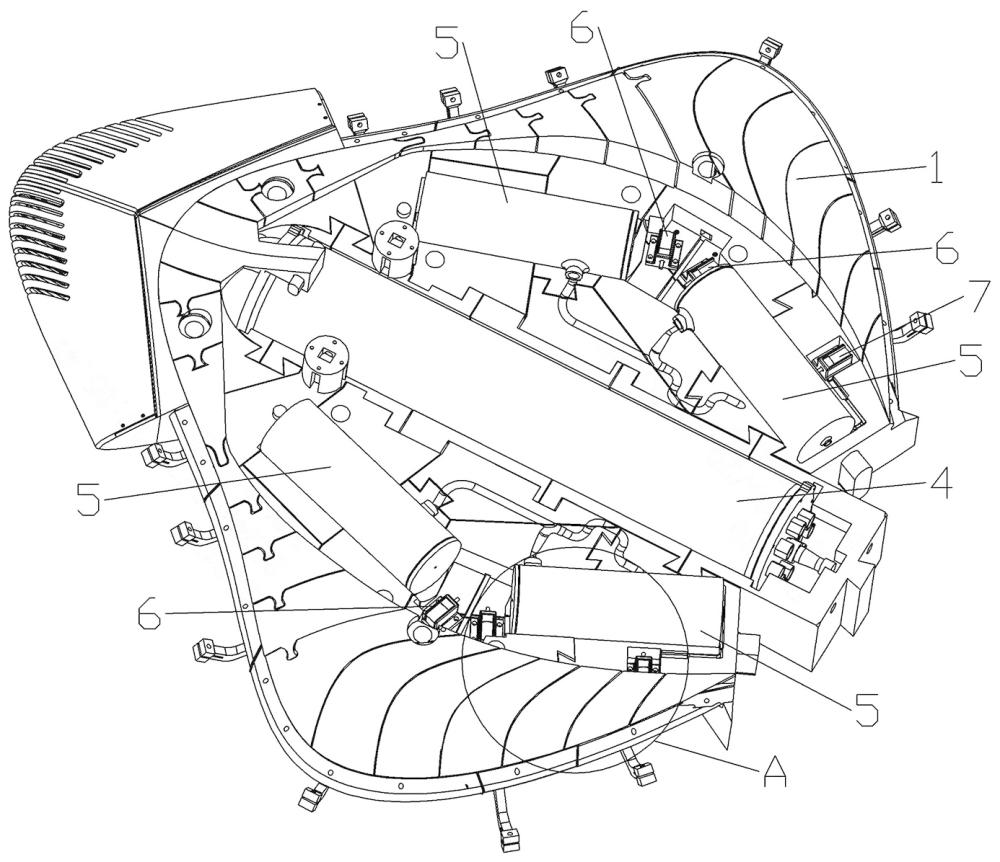
3、一种可浮沉的仿生魟鱼机器人,包括本体,所述本体内部中心设有设有沿本体长度方向延伸的中心舱,所述本体的内部设有四个蓄水罐,其中两个所述蓄水罐位于中心舱上半部左右两侧,另外两个所述蓄水罐位于中心舱下半部左右两侧,上侧的两个所述蓄水罐呈八字形布置,下侧的两个所述蓄水罐呈倒八字形布置,所述中心舱左右两侧的蓄水罐对称布置,所述蓄水罐内设有活塞,上侧的两个所述蓄水罐内部具有位于活塞上侧的水腔和位于活塞下侧的气腔,下侧的两个所述蓄水罐内部具有位于活塞上侧的气腔和位于活塞下侧的水腔,所述本体内设有驱动活塞上下运动的驱动机构,所述本体内设有气室,所述中心舱左侧的两个蓄水罐的气腔通过第一连接管与气室连通,所述中心舱右侧的两个蓄水罐的气腔通过第二连接管与气室连通,上侧的两个所述蓄水罐的上端分别设有与水腔连通的第一水管,下侧的两个所述蓄水罐的下端分别设有与水腔连通的第二水管。
4、进一步的,所述蓄水罐包括罐体以及密封可拆卸连接在罐体一端的罐盖,上侧的两个所述蓄水罐的罐盖位于下端,下侧的两个所述蓄水罐的罐盖位于上端。
5、进一步的,所述活塞包括一体成型的第一大径段、小径段以及第二大径段,所述第一大径段和第二大径段的直径相等,所述第一大径段和第二大径段的外壁均与罐体内部滑动密封配合。
6、进一步的,所述第一连接管为三头软管,所述第一连接管的三个接头分别与两个蓄水罐的气腔以及气室连通,所述第二连接管为三头软管,所述第二连接管的三个接头分别与两个蓄水罐的气腔以及气室连通。
7、进一步的,所述驱动机构包括第一电机以及第二电机,上侧的所述蓄水罐内活塞的驱动机构中的第一电机位于蓄水罐下侧,下侧的所述蓄水罐内活塞的驱动机构中的第一电机位于蓄水罐上侧,所述第二电机位于蓄水罐一侧,所述第一电机以及第二电机的输出轴端部分别设有缠线轮,所述第一电机以及第二电机上的缠线轮上的拉线端部分别与活塞的上侧两侧连接。
8、进一步的,所述中心舱呈柱形机构,所述中心舱内具有用于安装元器件的设备腔。
9、本实用新型提供了一种可浮沉的仿生魟鱼机器人,相比于现有技术,其有益效果在于:
10、本实用新型的可浮沉的仿生魟鱼机器人使用时,不需要下沉和上浮时,仿生魟鱼机器人应当在海水所受浮力与重力保持平衡,即不考虑海草床环境中浪潮等其他影响时,在竖直方向上受力为0。当需要下沉时,可以通过中心舱的控制模块来自由灵活的选择某一部位的蓄水罐进行吸水,以此进行重心的调整,来选择下潜时的姿态。同时,位于中部的第一电机启动,通过拉线将活塞向内部拉动,引起气压变化。海水通过第一水管和第二水管进入蓄水罐,为仿生魟鱼机器人增加重量,实现下沉。当需要上浮时,可以通过中心舱的控制模块来自由灵活的选择某一部位的蓄水罐进行放水,以此进行重心的调整,来选择上浮时的姿态。同时,位于端部的第二电机启动,通过拉线将活塞向外部拉动,引起气压变化。蓄水罐内的水通过第一水管和第二水管排出,为仿生魟鱼机器人减少重量,实现上浮。本实用新型的可浮沉的仿生魟鱼机器人模拟鱼类鱼鳔,从而达到了可灵活上浮下沉的目的。
11、本实用新型的可浮沉的仿生魟鱼机器人中,当蓄水罐内原有气体被压缩或膨胀,使得蓄水罐承压巨大,极易造成崩裂。因此软管发挥作用,开始将气体排入中心舱或中心舱气体向蓄水罐排入,同时由于所有蓄水罐的通气软管都连接于中心舱。因此,四个蓄水罐与中心舱视为连通状态,当某一部分出现气压过大或过小时,其余蓄水罐与中心舱都会发挥气压代偿的作用,可最大程度利用材料抗压性能。
技术特征:1.一种可浮沉的仿生魟鱼机器人,其特征在于,包括本体,所述本体内部中心设有设有沿本体长度方向延伸的中心舱,所述本体的内部设有四个蓄水罐,其中两个所述蓄水罐位于中心舱上半部左右两侧,另外两个所述蓄水罐位于中心舱下半部左右两侧,上侧的两个所述蓄水罐呈八字形布置,下侧的两个所述蓄水罐呈倒八字形布置,所述中心舱左右两侧的蓄水罐对称布置,所述蓄水罐内设有活塞,上侧的两个所述蓄水罐内部具有位于活塞上侧的水腔和位于活塞下侧的气腔,下侧的两个所述蓄水罐内部具有位于活塞上侧的气腔和位于活塞下侧的水腔,所述本体内设有驱动活塞上下运动的驱动机构,所述本体内设有气室,所述中心舱左侧的两个蓄水罐的气腔通过第一连接管与气室连通,所述中心舱右侧的两个蓄水罐的气腔通过第二连接管与气室连通,上侧的两个所述蓄水罐的上端分别设有与水腔连通的第一水管,下侧的两个所述蓄水罐的下端分别设有与水腔连通的第二水管。
2.根据权利要求1所述的可浮沉的仿生魟鱼机器人,其特征在于,所述蓄水罐包括罐体以及密封可拆卸连接在罐体一端的罐盖,上侧的两个所述蓄水罐的罐盖位于下端,下侧的两个所述蓄水罐的罐盖位于上端。
3.根据权利要求2所述的可浮沉的仿生魟鱼机器人,其特征在于,所述活塞包括一体成型的第一大径段、小径段以及第二大径段,所述第一大径段和第二大径段的直径相等,所述第一大径段和第二大径段的外壁均与罐体内部滑动密封配合。
4.根据权利要求1所述的可浮沉的仿生魟鱼机器人,其特征在于,所述第一连接管为三头软管,所述第一连接管的三个接头分别与两个蓄水罐的气腔以及气室连通,所述第二连接管为三头软管,所述第二连接管的三个接头分别与两个蓄水罐的气腔以及气室连通。
5.根据权利要求1所述的可浮沉的仿生魟鱼机器人,其特征在于,所述驱动机构包括第一电机以及第二电机,上侧的所述蓄水罐内活塞的驱动机构中的第一电机位于蓄水罐下侧,下侧的所述蓄水罐内活塞的驱动机构中的第一电机位于蓄水罐上侧,所述第二电机位于蓄水罐一侧,所述第一电机以及第二电机的输出轴端部分别设有缠线轮,所述第一电机以及第二电机上的缠线轮上的拉线端部分别与活塞的上侧两侧连接。
6.根据权利要求5所述的可浮沉的仿生魟鱼机器人,其特征在于,所述中心舱呈柱形机构,所述中心舱内具有用于安装元器件的设备腔。
技术总结本技术涉及一种可浮沉的仿生魟鱼机器人。该可浮沉的仿生魟鱼机器人包括本体,本体内部中心设有设有沿本体长度方向延伸的中心舱,本体的内部设有四个蓄水罐,其中两个蓄水罐位于中心舱上半部左右两侧,另外两个蓄水罐位于中心舱下半部左右两侧,上侧的两个蓄水罐呈八字形布置,下侧的两个蓄水罐呈倒八字形布置,中心舱左右两侧的蓄水罐对称布置,蓄水罐内设有活塞,上侧的两个蓄水罐内部具有位于活塞上侧的水腔和位于活塞下侧的气腔,下侧的两个蓄水罐内部具有位于活塞上侧的气腔和位于活塞下侧的水腔,本体内设有驱动活塞上下运动的。本技术的可浮沉的仿生魟鱼机器人模拟鱼类鱼鳔,从而达到了可灵活上浮下沉的目的。技术研发人员:高建设,李子轩,王振杰,龚炳旭,陈聪,赵羽辰受保护的技术使用者:郑州大学技术研发日:20240524技术公布日:2024/12/23本文地址:https://www.jishuxx.com/zhuanli/20241226/347305.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表