轨迹数据的压缩方法、装置、电子设备及存储介质与流程
- 国知局
- 2025-01-10 13:16:56
本技术涉及车辆,特别涉及一种轨迹数据的压缩方法、装置、电子设备及存储介质。
背景技术:
1、随着汽车车载导航以及智能座舱自动驾驶技术的普及,海量的行程轨迹数据将会对于数据存储、网络传输、快速回放以及快速检索技术有着较高要求。当前已有的轨迹数据降噪、压缩和优化方法有很多,但大部分集中在了轨迹数据的前期预处理,比如异常轨迹点降噪处理,轨迹点的插值优化等;以及基于某种特定模型的轨迹点数据优化。上述方法能够在宏观层面大大过滤掉冗余数据,但现实中车辆轨迹时时刻刻在不同的地物空间上产生,比如出租车,公交车等;有些方法也利用了轨迹点之间的相似性做了简化存储,但方法比较简陋,不够灵活,压缩度也有限。日常汽车用户轨迹往往会有需要保存时间至少数天至数月以及实时上传分析的实际需求,海量存储和实时传输依然避免不了,因此需要在每一个轨迹点的微观层面也要做到极致压缩才能满足此类要求。
2、行程轨迹点往往呈现出连续性、时间跨度长、数据体量巨大等明星特征,而且车载领域不仅有本地存储、回放、分析需求,而且还需要进行远程网络传输、实时监控、分析等跨端需求。车联网技术和5g通信技术发展到现在,尽管已经有了长足的发展和进步,但在商用民用领域依然没有形成规模性大幅成本下降的效应,随着新能源电动汽车的快速发展,传统汽车和电动汽车都进入了竞争白热化阶段,而海量轨迹数据的存储和实时传输分析对于硬件的要求很高,在硬件成本无法进一步规模性降低的情况下,急需在大体量数据压缩和传输方面寻找突破。
3、相关技术将位置相同轨迹位置点进行合并压缩处理,即多个位置点删除合并为一条轨迹点,并将时间作为序列存储。不同位置的轨迹点进行阈值内速度判断,同一个速度进行合并同理的合并压缩处理。
4、然而,这种方法仅仅是适用于位置和速度判断是否相同,现实中行程轨迹点包含的属性信息远远不止空间位置和速度,还有定位类型,精度,卫星类型和强度,传感器数据等信息,空间位置相同的轨迹点车辆的行驶状态也可能存在差异,因此不能简单的删除处理。在车载行程轨迹记录中,不能简单的做冗余数据的删除处理,而应该尽可能的保留各个属性数据,以便精准的判断分析出车辆的位置状态,行驶状态以及分析可预知的状态。
技术实现思路
1、本技术提供一种轨迹数据的压缩方法、装置、电子设备及存储介质,以解决大体量轨迹数据难以在保证压缩效果的同时保留属性数据的问题,在面对车辆物理数据存储空间不充足、网络条件复杂但要求实时上传位置,真实还原原始轨迹和监控分析等需求场景下,极大压缩海量数据的物理占用和网络传输大小,方便实时高速存储、上传和解码分析。
2、本技术第一方面实施例提供一种轨迹数据的压缩方法,包括以下步骤:
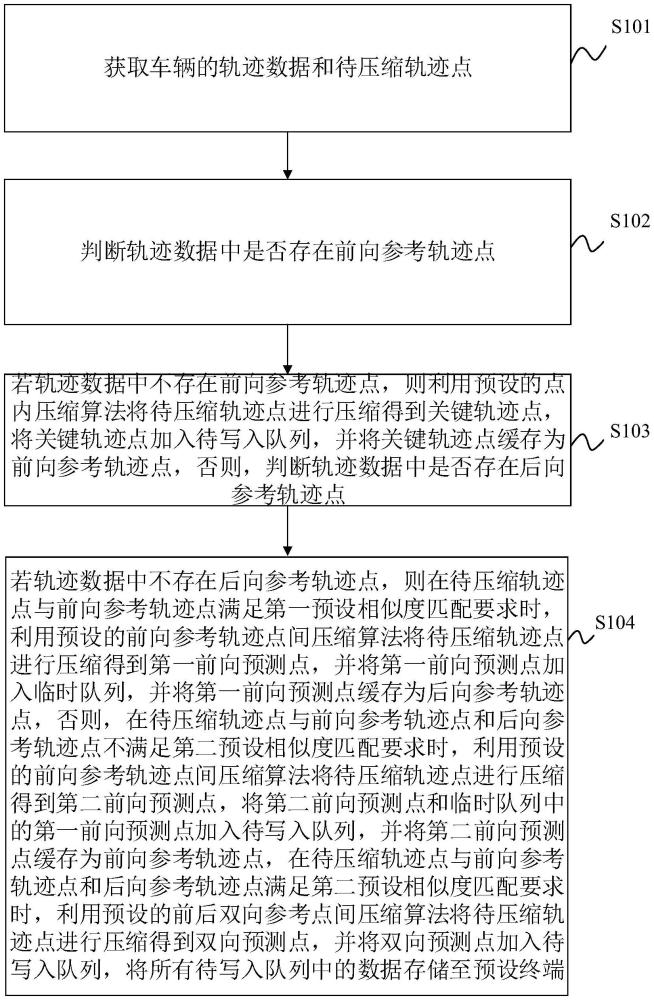
3、获取车辆的轨迹数据和待压缩轨迹点;
4、判断所述轨迹数据中是否存在前向参考轨迹点;
5、若所述轨迹数据中不存在前向参考轨迹点,则利用预设的点内压缩算法将所述待压缩轨迹点进行压缩得到关键轨迹点,将所述关键轨迹点加入待写入队列,并将所述关键轨迹点缓存为前向参考轨迹点,否则,判断所述轨迹数据中是否存在后向参考轨迹点;
6、若所述轨迹数据中不存在后向参考轨迹点,则在所述待压缩轨迹点与前向参考轨迹点满足第一预设相似度匹配要求时,利用预设的前向参考轨迹点间压缩算法将所述待压缩轨迹点进行压缩得到第一前向预测点,并将所述第一前向预测点加入临时队列,并将所述第一前向预测点缓存为后向参考轨迹点,否则,在所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点不满足第二预设相似度匹配要求时,利用所述预设的前向参考轨迹点间压缩算法将所述待压缩轨迹点进行压缩得到第二前向预测点,将所述第二前向预测点和所述临时队列中的所述第一前向预测点加入所述待写入队列,并将所述第二前向预测点缓存为前向参考轨迹点,在所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点满足所述第二预设相似度匹配要求时,利用预设的前后双向参考点间压缩算法将所述待压缩轨迹点进行压缩得到双向预测点,并将所述双向预测点加入所述待写入队列,将所有待写入队列中的数据存储至预设终端。
7、可选地,在一些实施例中,在判定所述轨迹数据中存在所述前向参考轨迹点,且所述轨迹数据中不存在后向参考轨迹点之后,还包括:
8、若所述待压缩轨迹点与所述前向参考轨迹点不满足所述第一预设相似度匹配要求时,则利用预设的点内压缩算法将所述待压缩轨迹点进行压缩得到所述关键轨迹点。
9、可选地,在一些实施例中,在判定所述轨迹数据中存在所述前向参考轨迹点,且所述轨迹数据中不存在所述后向参考轨迹点之后,还包括:
10、若所述待压缩轨迹点与所述前向参考轨迹点存在至少一个主要匹配要素超过对应的误差阈值,则判定所述待压缩轨迹点与所述前向参考轨迹点不满足所述第一预设相似度匹配要求,否则,判定所述待压缩轨迹点与所述前向参考轨迹点满足所述第一预设相似度匹配要求。
11、可选地,在一些实施例中,在判定所述轨迹数据中存在所述前向参考轨迹点,且所述轨迹数据中存在后向参考轨迹点之后,还包括:
12、若所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点存在至少一个次要匹配要素超过对应的误差阈值,则判定所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点不满足所述第二预设相似度匹配要求,否则,判定所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点满足所述第二预设相似度匹配要求。
13、本技术第二方面实施例提供一种轨迹数据的压缩装置,包括:
14、获取模块,用于获取车辆的轨迹数据和待压缩轨迹点;
15、判断模块,用于判断所述轨迹数据中是否存在前向参考轨迹点;
16、第一压缩模块,用于在所述轨迹数据中不存在前向参考轨迹点的情况下,利用预设的点内压缩算法将所述待压缩轨迹点进行压缩得到关键轨迹点,将所述关键轨迹点加入待写入队列,并将所述关键轨迹点缓存为前向参考轨迹点,否则,判断所述轨迹数据中是否存在后向参考轨迹点;
17、第二压缩模块,用于在所述轨迹数据中不存在后向参考轨迹点的情况下,在所述待压缩轨迹点与前向参考轨迹点满足第一预设相似度匹配要求时,利用预设的前向参考轨迹点间压缩算法将所述待压缩轨迹点进行压缩得到第一前向预测点,并将所述第一前向预测点加入临时队列,并将所述第一前向预测点缓存为后向参考轨迹点,否则,在所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点不满足第二预设相似度匹配要求时,利用所述预设的前向参考轨迹点间压缩算法将所述待压缩轨迹点进行压缩得到第二前向预测点,将所述第二前向预测点和所述临时队列中的所述第一前向预测点加入所述待写入队列,并将所述第二前向预测点缓存为前向参考轨迹点,在所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点满足所述第二预设相似度匹配要求时,利用预设的前后双向参考点间压缩算法将所述待压缩轨迹点进行压缩得到双向预测点,并将所述双向预测点加入所述待写入队列,将所有待写入队列中的数据存储至预设终端。
18、可选地,在一些实施例中,在判定所述轨迹数据中存在所述前向参考轨迹点,且所述轨迹数据中不存在后向参考轨迹点之后,所述第二压缩模块,还包括:
19、第一压缩单元,用于在所述待压缩轨迹点与所述前向参考轨迹点不满足所述第一预设相似度匹配要求的情况下,则利用预设的点内压缩算法将所述待压缩轨迹点进行压缩得到所述关键轨迹点。
20、可选地,在一些实施例中,在判定所述轨迹数据中存在所述前向参考轨迹点,且所述轨迹数据中不存在所述后向参考轨迹点之后,所述第二压缩模块,还包括:
21、第一判定单元,用于在所述待压缩轨迹点与所述前向参考轨迹点存在至少一个主要匹配要素超过对应的误差阈值的情况下,判定所述待压缩轨迹点与所述前向参考轨迹点不满足所述第一预设相似度匹配要求,否则,判定所述待压缩轨迹点与所述前向参考轨迹点满足所述第一预设相似度匹配要求。
22、可选地,在一些实施例中,在判定所述轨迹数据中存在所述前向参考轨迹点,且所述轨迹数据中存在后向参考轨迹点之后,所述第二压缩模块,还包括:
23、第二判定单元,用于在所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点存在至少一个次要匹配要素超过对应的误差阈值的情况下,判定所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点不满足所述第二预设相似度匹配要求,否则,判定所述待压缩轨迹点与所述前向参考轨迹点和所述后向参考轨迹点满足所述第二预设相似度匹配要求。
24、本技术第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的轨迹数据的压缩方法。
25、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的轨迹数据的压缩方法。
26、由此,通过获取车辆的轨迹数据和待压缩轨迹点;判断轨迹数据中是否存在前向参考轨迹点;若轨迹数据中不存在前向参考轨迹点,则利用预设的点内压缩算法将待压缩轨迹点进行压缩得到关键轨迹点,将关键轨迹点加入待写入队列,并将关键轨迹点缓存为前向参考轨迹点,否则,判断轨迹数据中是否存在后向参考轨迹点;
27、若轨迹数据中不存在后向参考轨迹点,则在待压缩轨迹点与前向参考轨迹点满足第一预设相似度匹配要求时,利用预设的前向参考轨迹点间压缩算法将待压缩轨迹点进行压缩得到第一前向预测点,并将第一前向预测点加入临时队列,并将第一前向预测点缓存为后向参考轨迹点,否则,在待压缩轨迹点与前向参考轨迹点和后向参考轨迹点不满足第二预设相似度匹配要求时,利用预设的前向参考轨迹点间压缩算法将待压缩轨迹点进行压缩得到第二前向预测点,将第二前向预测点和临时队列中的第一前向预测点加入待写入队列,并将第二前向预测点缓存为前向参考轨迹点,在待压缩轨迹点与前向参考轨迹点和后向参考轨迹点满足第二预设相似度匹配要求时,利用预设的前后双向参考点间压缩算法将待压缩轨迹点进行压缩得到双向预测点,并将双向预测点加入待写入队列,将所有待写入队列中的数据存储至预设终端。由此,解决了大体量轨迹数据难以在保证压缩效果的同时保留属性数据的问题,在面对车辆物理数据存储空间不充足、网络条件复杂但要求实时上传位置,真实还原原始轨迹和监控分析等需求场景下,极大压缩海量数据的物理占用和网络传输大小,方便实时高速存储、上传和解码分析。
28、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20250110/352117.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表