一种带有类型选择装置的自动装载机器人
- 国知局
- 2025-01-10 13:35:09
本发明涉及自动机器人,具体涉及一种带有类型选择装置的自动装载机器人。
背景技术:
1、随着数字化技术在军事领域的广泛应用,数字化自动化是武器发展的必然方向,数字化控制的自动装载机器人将成为为发射器装载技术的研发方向。
2、管型发射器类武器是军队重要的作战装备,在气象部门也在防雹减灾和人工降雨使用大量的管型发射器类武器。发射器类武器机动性强、威力强大。然而发射器所发射的圆柱形体弹丸通常重量高达数十千克,圆柱形体也分为多种类型。如果圆柱形体装填完全靠人工装载,不但使用效率低,也占用车内空间消耗过多的人力。同时完成上一次发射后,需要快速装填下一发新的圆柱形体时,由于对应目标的变化,圆柱形体还需要改换类型,尤其连续发射过程中仅仅依靠人力难以保证圆柱形体装填速度和种类的准确性。在苛刻的环境中,采用人力装填圆柱形体非常消耗体力,装载人员的疲劳会极大影响装载速度。因此,使用自动装载装置代替人工进行圆柱形体装填是一个可行的选择。
3、现有的自动装载机包括尾舱式方案和底舱式方案两种。尾舱式自动装载机将圆柱形体放置于车辆后部,体积大,圆柱形体的位置偏高,进而导致整车安全性也较差。底舱式自动装载机的位于车辆底部,圆柱形体呈轮盘式布置。使用提升机抓住圆柱形体底部并将其提升至发射器尾部,再由推动器将圆柱形体推入发射。它的主要缺点是圆柱形体呈轮盘式布置,导致自动装载机水平宽度尺寸大,也难以布置纵向长度较大的整装式圆柱形体。
技术实现思路
1、本发明的第一方面提供一种带有类型选择装置的自动装载机器人,所述的自动装载机器人包括:圆柱形体固定架、装载机械臂和圆柱形体推送装置;
2、所述圆柱形体推送装置固定在发射器尾部;
3、所述圆柱形体固定架包含多个圆柱形体台架,每个圆柱形体台架包括托架和至少二个锁定装置,所述锁定装置将圆柱形体固定并锁紧;
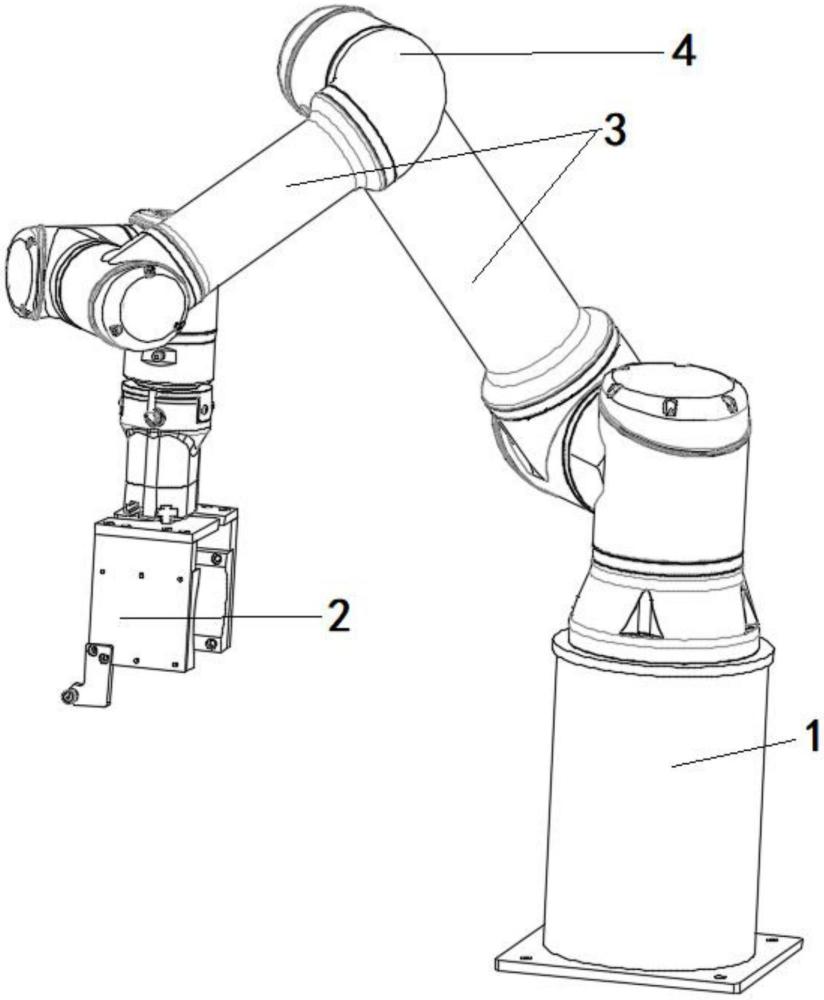
4、所述装载机械臂包括:基座、圆柱形体夹持具、多个连接筒臂和多个能够转动的肘节;
5、所述基座、所述多个连接筒臂和所述圆柱形体夹持具依次连接;所述基座与所述连接筒臂之间由至少一个肘节连接;
6、任意两个所述连接筒臂之间由至少一个肘节连接;
7、至少一个肘节连接在所述圆柱形体夹持具与末节连接筒臂之间。
8、如本发明的第一方面所述的自动装载机器人,所述能够转动的肘节包括能够360度旋转的万向节,所述肘节的数量大于等于4个。
9、如本发明的第一方面所述的自动装载机器人,多个连接筒臂之间通过多个能够转动的肘节的连接,使得圆柱形体夹持具能够在至少4个平面内的每一个平面上做360度旋转。
10、如本发明的第一方面所述的自动装载机器人,所述基座被固定在发射器战斗仓的底板上;所述基座内部设置控制所述装载机械臂的中央控制系统。
11、如本发明的第一方面所述的自动装载机器人,所述中央控制系统通信连接至少四个传感器,所述传感器包括:圆柱形体固定架上的圆柱形体加载传感器、圆柱形体固定架上的第一圆柱形体锁定传感器、圆柱形体夹持具上的种类监测传感器及圆柱形体夹持具上的第二圆柱形体锁定传感器。
12、如本发明的第一方面所述的自动装载机器人,中央控制系统根据传感器的检测信息和输入的指挥命令生成控制信息,所述控制信息控制装载机械臂转向指定的圆柱形体固定架,圆柱形体夹持具抓取指定的圆柱形体固定架上预定种类的圆柱形体,将所述预定种类的圆柱形体提取并传送到所述圆柱形体推送装置上。
13、如本发明的第一方面所述的自动装载机器人,所述的圆柱形体夹持具采用钳形夹持构型;
14、所述的圆柱形体夹持具上设置机械开锁装置,所述的机械开锁装置与所述锁定装置配合用以解除对待提取的圆柱形体的锁定;所述钳形夹持构型夹持并锁定待提取的圆柱形体;所述圆柱形体夹持具上还设置第二圆柱形体类型传感器。
15、如本发明的第一方面所述的自动装载机器人,所述钳形夹持构型包括:偶数个夹具,每两个夹具构成一对抱紧装置用于夹持圆柱形体弹体;至少一个夹具上安装机械开锁装置。
16、本发明的第二方面提供一种自动装载机器人操作方法,用于操作前述的自动装载机器人,所述方法包括以下步骤:
17、自动装载机器人的中央控制系统接收提取圆柱形体指令,所述指令包括:种类选择,连续发射次数;
18、中央控制系统通过通信连接的传感器获取圆柱形体固定架的各台架的圆柱形体信息,所述圆柱形体信息包括:台架上圆柱形体有无、台架上圆柱形体的类型;
19、中央控制系统选定符合指令要求的台架,驱动装载机械臂转动到所述符合指令要求的台架侧,抓取圆柱形体并将圆柱形体装载到所述圆柱形体推送装置上;
20、中央控制系统确定装载机械臂离开所述圆柱形体推送装置,且所述圆柱形体被加载到推送装置上后,中央控制系统驱动所述圆柱形体推送装置将圆柱形体推入发射器。
21、如本发明第二方面是所述的自动装载机器人操作方法,所述驱动装载机械臂转动到所述符合指令要求的台架侧,抓取圆柱形体的步骤包括:使用所述圆柱形体夹持具上的第二圆柱形体类型传感器检测该圆柱形体的种类,并将检测结果传输的到中央控制系统。
22、本发明具有如下优点:本发明的机器人主体结构使用更多的机械构造,中央控制器部分用于根据圆柱形体的类型选择和发射指令提供机器人的运行控制操作,圆柱形体的固定,锁紧完全依靠机械锁构成。以机械结构为主要组成的机器人在整体上抗干扰性更好,稳定性更高。在复杂干扰环境下具有更好的自动保护性质。适于具有有爆炸风险的环境。
23、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:1.一种带有类型选择装置的自动装载机器人,其特征在于,所述的自动装载机器人包括:圆柱形体固定架、装载机械臂和圆柱形体推送装置;
2.如权利要求1所述的自动装载机器人,其特征在于,所述能够转动的肘节包括能够360度旋转的万向节,所述肘节的数量大于等于4个。
3.如权利要求2所述的自动装载机器人,其特征在于,多个连接筒臂之间通过多个能够转动的肘节的连接,使得圆柱形体夹持具能够在至少4个平面内的每一个平面上做360度旋转。
4.如权利要求1所述的自动装载机器人,其特征在于,所述基座被固定在载具密闭仓的底板上;所述基座内部设置控制所述装载机械臂的中央控制系统。
5.如权利要求4所述的自动装载机器人,其特征在于,所述中央控制系统通信连接至少四个传感器,所述传感器包括:圆柱形体固定架上的圆柱形体加载传感器、圆柱形体固定架上的第一圆柱形体锁定传感器、圆柱形体夹持具上的种类监测传感器及圆柱形体夹持具上的第二圆柱形体锁定传感器。
6.如权利要求5所述的自动装载机器人,其特征在于,中央控制系统根据传感器的检测信息和输入的指挥命令生成控制信息,所述控制信息控制装载机械臂转向指定的圆柱形体固定架,圆柱形体夹持具抓取指定的圆柱形体固定架上预定种类的圆柱形体,将所述预定种类的圆柱形体提取并传送到所述圆柱形体推送装置上。
7.如权利要求1所述的自动装载机器人,其特征在于,所述的圆柱形体夹持具采用钳形夹持构型;
8.如权利要求7所述的自动装载机器人,其特征在于,所述钳形夹持构型包括:偶数个夹具,每两个夹具构成一对抱紧装置用于夹持圆柱形体本体;至少一个夹具上安装机械开锁装置。
9.一种自动装载机器人操作方法,用于操作如权利要求1-8中任一项所述的自动装载机器人,其特征在于,所述方法包括以下步骤:
10.如权利要求9所述的自动装载机器人操作方法,,其特征在于,所述驱动装载机械臂转动到所述符合指令要求的台架侧,抓取圆柱形体的步骤包括:使用所述圆柱形体夹持具上的圆柱形体类型传感器检测该圆柱形体的种类,并将检测结果传输的到中央控制系统。
技术总结本发明公开了一种带有类型选择装置的自动装载机器人,包括:圆柱形体固定架、装载机械臂和圆柱形体推送装置;圆柱形体推送装置固定在发射器尾部;圆柱形体固定架包含多个圆柱形体台架,每个圆柱形体台架包括托架和至少二个锁定装置;装载机械臂包括依次连接的基座、多个连接筒臂和圆柱形体夹持具;基座与连接筒臂之间由至少一个肘节连接;任意两个连接筒臂之间由至少一个肘节连接;至少一个肘节连接在圆柱形体夹持具与末节连接筒臂之间。本发明的主体结构使用更多的机械构造,圆柱形体的固定,锁紧完全依靠机械锁构成。该机器人在整体上抗干扰性好,稳定性高。适于具有爆炸风险的环境。技术研发人员:徐达,黄海,李华,白向华,苏忠亭,周诚,王兆阳,戴国云,张耿受保护的技术使用者:中国人民解放军陆军装甲兵学院技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/354043.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表