一种烟草行业喂料机提升带无定量管速度控制方法与流程
- 国知局
- 2025-01-10 13:42:20
本发明属于烟草生产,具体涉及一种烟草行业喂料机提升带无定量管速度控制方法。
背景技术:
1、烟草行业喂料机是保证连接生产、物料均匀的重要设备,是烟草行业使用最为频繁的设备之一,喂料机一般与定量管配合使用,当下游电子秤上物料堆积较多时,定量管高料位被遮挡,喂料机提升带停止运行,防止物料堆积堵塞,当下游电子秤上物料缺少时,定量管低料位露出,喂料机提升带加快运行速度,防止下游设备断料。但在实际运行时,会出现由于烟片过轻下落缓慢,遮挡住高料位,导致下游电子秤物料缺乏情况下喂料机的电子皮带秤停止运行,造成断流。同时定量管内壁脏乱,或其料位检测光电有污渍时都会出现误动作情况,影响正常生产。
技术实现思路
1、本发明的目的在于提供一种烟草行业喂料机提升带无定量管速度控制方法,以解决上述背景技术中所存在的问题。
2、为实现上述目的,本申请是通过以下技术方案实现的:
3、一种烟草行业喂料机提升带无定量管速度控制方法,包括以下步骤:
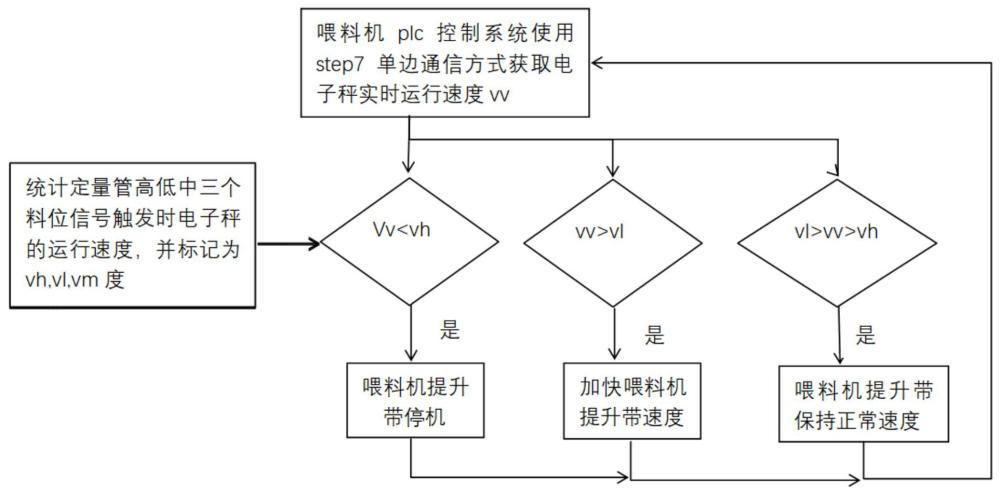
4、s1、通过在第一设定时间内,对设置有定量管配合的喂料机提升带的定量管进行统计,统计定量管在高料位、中料位及低料位三个料位信号触发时的电子秤的运行速度,并分别标记为vh,vm,vl;
5、s2、喂料机系统控制器获取电子秤的即时运行速度数据,标记为vv;
6、s3、喂料机系统控制器判断,若vv>vl时,表明此时电子秤上堆积物料少于规定数量的底限,喂料机系统控制器控制喂料机提升带提高速度;若vv<vh时,表明此时电子秤上堆积物料大于规定数据的上限,喂料机系统控制器控制喂料机提升带降低速度或停止运行。
7、进一步的,步骤s1中,高料位时电子秤的运行速度vh,中料位时电子秤的运行速度vm,低料位时电子秤的运行速度vl均为第一设定时间内的平均速度。
8、进一步的,在步骤s1中,还包括在第一设定时间内,统计定量管位于高料位与低料位之间时的喂料机提升带的平均速度vt,统计定量管达到高料位时的喂料机提升带的即时平均速度vp,统计定量管降到低料位时喂料机提升带的即时平均速度vd。
9、进一步的,步骤s3中,若vv>vl时,喂料机系统控制器控制喂料机提升带的速度提高到vp(1+n%),然后每隔第二设定时间,喂料机系统控制器控制喂料机提升带的速度降低vp(1+n%)速度的k%,直到降低到vt后并保持该速度。
10、进一步的,步骤s3中,若vv<vh时,喂料机系统控制器控制喂料机提升带的速度降低到vd(1+ n%),然后每隔第二设定时间,喂料机系统控制器控制喂料机提升带的速度提高vd(1+n%)速度的k%,直到提高到vt后并保持该速度。
11、进一步的,喂料机系统控制器及电子秤控制器电信号连接,且均为plc控制器。
12、本发明的有益效果是:
13、通过本技术方案,在不增加任何其他设备的情况下,直接去除定量管,仍能实现喂料机提升带自动速度控制,提高生产稳定性,保证了生产质量,也降低了设备成本,具有良好的推广价值。
技术特征:1.一种烟草行业喂料机提升带无定量管速度控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的烟草行业喂料机提升带无定量管速度控制方法,其特征在于,步骤s1中,高料位时电子秤的运行速度vh,中料位时电子秤的运行速度vm,低料位时电子秤的运行速度vl均为第一设定时间内的平均速度。
3.根据权利要求1所述的烟草行业喂料机提升带无定量管速度控制方法,其特征在于,在步骤s1中,还包括在第一设定时间内,统计定量管位于高料位与低料位之间时的喂料机提升带的平均速度vt,统计定量管达到高料位时的喂料机提升带的即时平均速度vp,统计定量管降到低料位时喂料机提升带的即时平均速度vd。
4.根据权利要求3所述的烟草行业喂料机提升带无定量管速度控制方法,其特征在于,步骤s3中,若vv>vl时,喂料机系统控制器控制喂料机提升带的速度提高到vp(1+n%),然后每隔第二设定时间,喂料机系统控制器控制喂料机提升带的速度降低vp(1+n%)速度的k%,直到降低到vt后并保持该速度。
5.根据权利要求4所述的烟草行业喂料机提升带无定量管速度控制方法,其特征在于,步骤s3中,若vv<vh时,喂料机系统控制器控制喂料机提升带的速度降低到vd(1+ n%),然后每隔第二设定时间,喂料机系统控制器控制喂料机提升带的速度提高vd(1+n%)速度的k%,直到提高到vt后并保持该速度。
6.根据权利要求1所述的烟草行业喂料机提升带无定量管速度控制方法,其特征在于,喂料机系统控制器及电子秤控制器电信号连接,且均为plc控制器。
技术总结本发明属于烟草生产技术领域,具体涉及一种烟草行业喂料机提升带无定量管速度控制方法,具体步骤为:对设置有定量管配合的喂料机提升带的定量管进行统计,统计定量管在高料位、中料位及低料位三个料位信号触发时的电子秤的运行速度;喂料机系统控制器获取电子秤的即时运行速度数据;喂料机系统控制器判断,若电子秤的即时速度大于统计的低料位电子秤速度,喂料机系统控制器控制喂料机提升带提高速度;若电子秤的即时速度小于统计的高料位电子秤速度,喂料机系统控制器控制喂料机提升带降低速度或停止运行。本技术方案在不增加任何其他设备的情况下,直接去除定量管,仍能实现喂料机提升带自动速度控制,提高生产稳定性,保证了生产质量。技术研发人员:李明伟,左体勇,崔廷,杨金初,高尊华,张伟峰,杨光露,李果馨,孟瑾,闫俊清,杨常勇,郭华诚,周政伟,姜克森,兑幸福,王翼,曹兴强受保护的技术使用者:河南中烟工业有限责任公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/354817.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种前推供料器的制作方法
下一篇
返回列表