一种复杂环境下的鲁棒视觉SLAM系统的制作方法
- 国知局
- 2025-01-17 13:11:27
本发明涉及同步定位与地图构建,具体涉及一种复杂环境下的鲁棒视觉slam系统。
背景技术:
1、随着自动驾驶技术的快速发展,视觉slam系统作为实现自动驾驶车辆精确定位与地图构建的关键技术,得到了广泛应用。申请号为cn202310195225.6的专利公开了一种面向自动驾驶汽车的视觉slam系统及方法,所述系统包括图像预处理模块、多目标跟踪模块、视觉里程计模块、物体状态更新模块以及后端优化模块。所述方法包括:步骤s1,通过实例分割网络对图像进行预处理;步骤s2,判别物体的动静态;步骤s3,估计初始相机的位姿;步骤s4,去除动态物体;步骤s5,对图像关键帧执行优化策略。该发明的有益效果:在视觉图像中,可以实现高效地动态物体滤除,有效降低建图鬼影,提高定位的准确性和鲁棒性,以及能够提高自动驾驶车辆在动态环境下的适用性,但仍然存在以下不足之处:在复杂环境下,传统视觉slam系统往往难以保持较高的定位精度和地图构建质量,难以发现驾驶路线中的障碍物,从而影响了驾驶安全性。因此,开发一种能够在复杂环境下实现鲁棒性视觉slam系统,对于提高驾驶安全性具有重要意义。
2、在此部分中描述的方法不一定是之前已经设想到或采用的方法。除非另有指明,否则不应假定此部分中描述的任何方法仅因其包括在此部分中就被认为是现有技术。类似地,除非另有指明,否则此部分中提及的问题不应认为在任何现有技术中已被公认。
技术实现思路
1、为了克服上述的技术问题,本发明的目的在于提供一种复杂环境下的鲁棒视觉slam系统,解决了传统视觉slam系统在复杂环境下往往难以保持较高的定位精度和地图构建质量,难以发现驾驶路线中的障碍物,从而影响了驾驶安全性的问题。
2、本发明的目的可以通过以下技术方案实现:
3、一种复杂环境下的鲁棒视觉slam系统,包括:
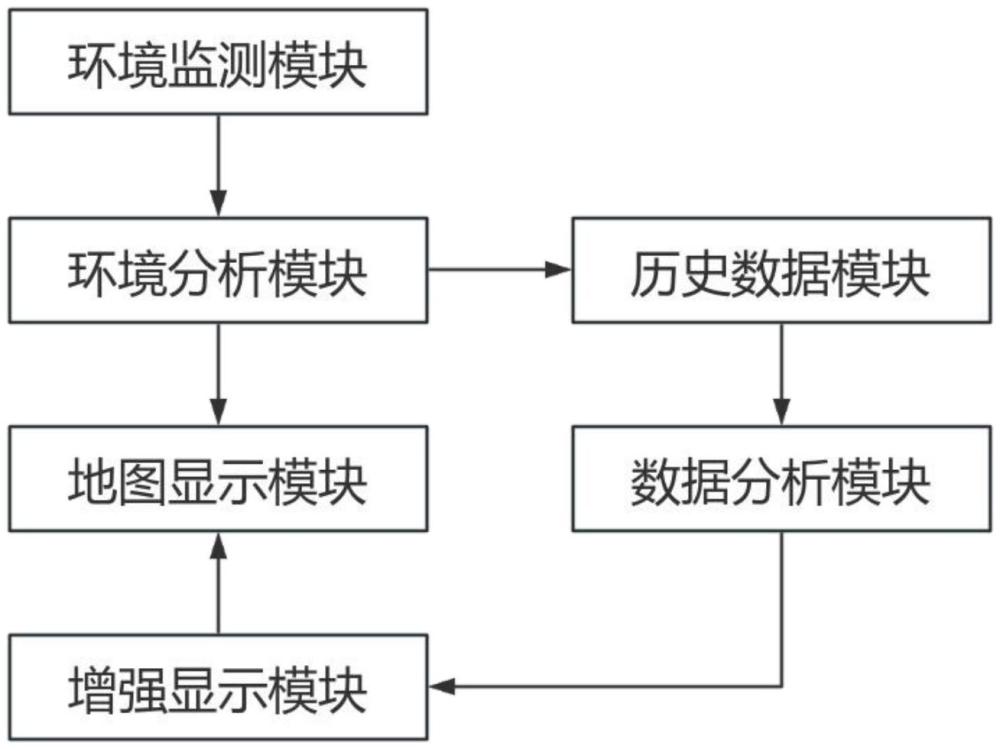
4、环境监测模块,用于对当前环境进行监测,获取环境监测参数,并将环境监测参数发送至环境分析模块;其中,环境监测参数包括光照信息gx、风速信息fs以及灰尘信息hc;
5、环境分析模块,用于根据环境监测参数获得环境监测系数hj,并根据环境监测系数hj生成正常显示指令或者历史数据分析指令,并将正常显示指令发送至地图显示模块,将历史数据分析指令发送至历史数据模块;
6、地图显示模块,用于接收到正常显示指令后直接利用slam技术构建局部地图并显示;
7、历史数据模块,用于接收到历史数据分析指令后根据参考路线和历史数据获得分析路线i,并将分析路线i发送至数据分析模块;
8、数据分析模块,用于获取分析路线i的数据分析参数,并根据数据分析参数获得数据分析系数sf,并根据数据分析系数sf获得增强路线,并将增强路线发送至增强显示模块;其中,数据分析参数包括时间信息sj、环境监测系数hj;
9、所述数据分析模块获得增强路线的具体过程如下:
10、将时间信息sj、环境监测系数hj进行量化处理,提取时间信息sj、环境监测系数hj的数值,并将其代入公式中计算,依据公式得到数据分析系数sf,其中,ε为预设的误差调节因子,取ε=0.915,s1、s2分别为设定的时间信息sj、环境监测系数hj对应的预设权重因子,s1、s2满足s2>s1>1.159,取s1=1.31,s2=1.76;
11、将所有的分析路线i按照数据分析系数sf从小到大的顺序进行排序,并将位于首位的分析路线i标记为增强路线,并将增强路线发送至增强显示模块;
12、增强显示模块,用于根据增强路线获得障碍物信息,并将障碍物信息发送至地图显示模块;
13、地图显示模块,用于利用slam技术构建局部地图,并根据障碍物信息对局部地图进行显示增强,形成增强地图并显示。
14、作为本发明进一步的方案:所述环境监测模块获取光照信息gx的具体过程如下:
15、获取当前环境中的光照强度,并将其标记为光强值,获取光强值与预设的标准光照强度之间的光照强度差值,并将其标记为光照值gz,获取光照方向与图像采集点之间的夹角,并将其标记为夹角值,获取夹角值与预设的标准夹角之间的角度差值,并将其标记为角度值jd,将光照值gz、角度值jd进行量化处理,提取光照值gz、角度值jd的数值,并将其代入公式中计算,依据公式得到光照信息gx,其中,g1、g2分别为设定的光照值gz、角度值jd对应的预设比例系数,g1、g2满足g1+g2=1,0<g2<g1<1,取g1=0.68,g2=0.32。
16、作为本发明进一步的方案:所述环境监测模块获取风速信息fs的具体过程如下:
17、获取当前环境中的风速,并将其标记为风速信息fs。
18、作为本发明进一步的方案:所述环境监测模块获取灰尘信息hc的具体过程如下:
19、获取当前环境中的空气中的灰尘含量,并将其标记为灰尘信息hc。
20、作为本发明进一步的方案:所述环境分析模块获得环境监测系数hj的具体过程如下:
21、将光照信息gx、风速信息fs以及灰尘信息hc进行量化处理,提取光照信息gx、风速信息fs以及灰尘信息hc的数值,并将其代入公式中计算,依据公式得到环境监测系数hj,其中,π为数学常数,h1、h2以及h3分别为设定的光照信息gx、风速信息fs以及灰尘信息hc对应的预设权重因子,h1、h2以及h3满足h1>h3>h2>1.68,取h1=2.93,h2=1.85,h3=2.21。
22、作为本发明进一步的方案:所述环境分析模块生成正常显示指令的具体过程如下:
23、将环境监测系数hj与预设的环境监测阈值hjy进行比较:
24、如果环境监测系数hj<环境监测阈值hjy,则生成正常显示指令,并将正常显示指令发送至地图显示模块。
25、作为本发明进一步的方案:所述环境分析模块生成历史数据分析指令的具体过程如下:
26、将环境监测系数hj与预设的环境监测阈值hjy进行比较:
27、如果环境监测系数hj≥环境监测阈值hjy,则生成历史数据分析指令,并将历史数据分析指令发送至历史数据模块。
28、作为本发明进一步的方案:所述历史数据模块获得分析路线i的具体过程如下:
29、获取用户的行驶路线,并将其标记为参考路线;
30、接收到历史数据分析指令后从历史数据中获取与参考路线相同的路线的所有完成行程的行驶路线,并将其标记为分析路线i,i=1、……、n,n的取值为正整数,n表示为分析路线的总数,i为其中任意一个分析路线的编号;
31、将分析路线i发送至数据分析模块。
32、作为本发明进一步的方案:所述数据分析模块获取数据分析参数的具体过程如下:
33、获取分析路线i的行程开始时刻和当前时刻,获得两者之间的时间差值,并将其标记为时间信息sj;
34、获取分析路线i的环境监测系数hj,并将其标记为环境信息hx。
35、作为本发明进一步的方案:所述地图显示模块获得增强地图的具体过程如下:
36、利用slam技术构建局部地图,并根据障碍物信息构建障碍物模型,并根据障碍物的位置将障碍物模型在构建的局部地图上进行重叠,之后形成增强地图并显示,且达到障碍物的位置周围预设距离时,并利用障碍物信息进行语音播报提示。
37、本发明的有益效果:
38、本发明的一种复杂环境下的鲁棒视觉slam系统,该系统首先对所在环境进行数据采集和分析,获取环境监测参数,根据环境监测参数获得的环境监测系数能够综合衡量环境的复杂程度,且环境监测系数越大表示复杂程度越高,对同步定位与地图构建影响程度越高,当环境监测系数小时表示影响程度低,可以直接进行构建地图,当环境监测系数大时表示影响程度高,无法直接进行构建地图并显示,首先对历史数据进行数据采集和分析,获取数据分析参数,根据数据分析参数获得数据分析系数能够衡量分析路线的可靠程度,且数据分析系数越小表示分析路线的可靠程度越高,并根据增强路线获取障碍物信息对局部地图进行显示增强,形成增强地图并显示,能够将复杂环境下难以监测到的障碍物进行有效显示,提高构建的地图可靠性,进而提高用户驾驶的安全性;
39、本发明的鲁棒视觉slam系统,首先对环境因素进行准确判断,并根据历史数据的信息对构建的地图进行匹配,从而对复杂环境下难以监测到的情况进行补充显示,实现了在复杂环境下的高精度定位与地图构建,对复杂环境造成的不利影响进行消除以及改善,使其具有更强的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20250117/356386.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表