用于控制具有可变外科部位进入轨迹的协同外科器械的系统的制作方法
- 国知局
- 2024-07-12 10:23:14
背景技术:
1、一些外科手术需要使用多个外科器械同时在组织的区域或部分上操作以成功地执行手术。在一些情况下,由于解剖限制和/或手术的性质,多个外科器械不可能位于相同的解剖空间中。例如,在封闭的组织结构的区域(例如,食管的壁)上进行操作的手术期间,为了成功地执行该手术,可能需要多个外科器械中的一个外科器械位于封闭的组织结构内,并且可能需要多个外科器械中的另一个外科器械位于封闭的组织结构之外。
2、然而,在一些实施方式中,用于在从第一解剖空间接近组织的区域的组织的区域上操作的第一外科器械可以独立于用于在从不相关的第二解剖空间接近组织的区域的组织的区域上操作的第二外科器械操作。在这样的场景下,在需要第一外科器械和第二外科器械的协调操作来成功地执行手术的情况下,可能很难或不可能一起操纵第一外科器械和第二外科器械来实现成功的外科结果。
3、此外,外科系统通常结合有成像系统,该成像系统可允许医疗从业者在一个或多个显示器(例如,监视器、平板电脑屏幕等)上查看外科部位和/或其一个或多个部分。成像系统可包括具有相机的观察镜,该观察镜观察外科部位并且将视图传输到可由医疗从业者查看的一个或多个显示器。
4、成像系统可受到它们能够识别和/或传达给医疗从业者的信息的限制。例如,某些成像系统可能无法在术中识别三维空间内的某些隐蔽结构、物理轮廓和/或尺寸。又如,某些成像系统可能无法在术中将某些信息传送和/或传达给医疗从业者。
5、因此,仍然需要用于控制具有可变外科部位进入轨迹的协同外科器械以及用于改进的外科成像的改进的方法和系统。还需要用于控制具有可变外科部位进入轨迹的协同外科器械的改进的方法和系统。
技术实现思路
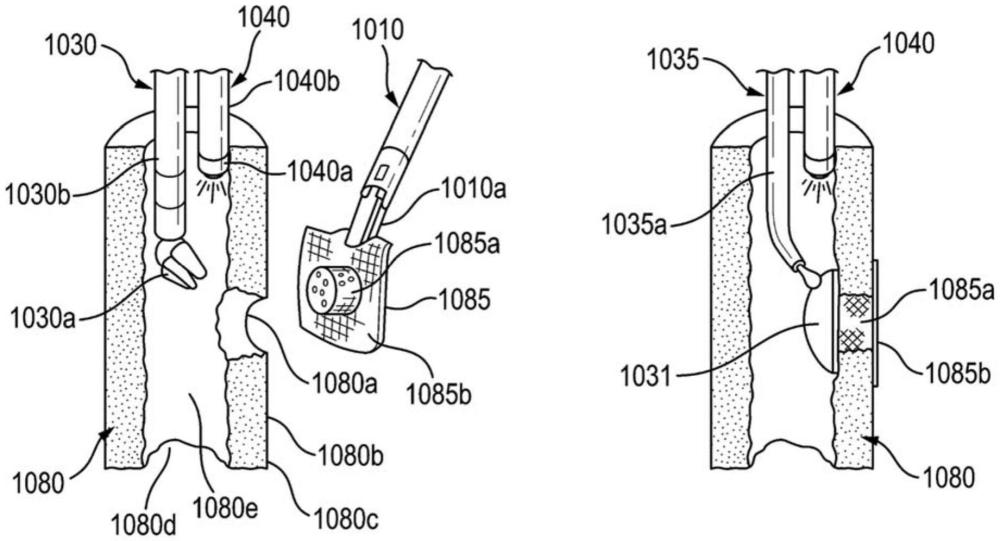
1、在一个方面,提供了一种系统,并且该系统可包括:第一外科器械,该第一外科器械被构造成能够插入到患者的第一体腔中,第一体腔位于患者的管腔结构之外;第二外科器械,该第二外科器械被构造成能够插入到管腔结构中;第一内窥镜,该第一内窥镜具有第一图像传感器,该第一图像传感器被配置为能够获取第一外科器械在第一体腔内的第一图像并且被定位成使得第二外科器械不在第一图像传感器的视场内;第二内窥镜,该第二内窥镜具有第二图像传感器,该第二图像传感器被配置为能够获取第二外科器械在管腔结构内的第二图像并且被定位成使得第一外科器械不在第二图像传感器的视场内;和控制器,该控制器被配置为能够接收第一图像和第二图像、能够基于所接收的第一图像和第二图像来确定第一外科器械和第二外科器械相对于彼此的第一位置和第二位置、并且能够基于所确定的第一位置和第二位置来协调第一外科器械和第二外科器械的协同运动。第一外科器械可被构造成能够将附属物递送到位于管腔结构处的目标区域,并且第二外科器械可被构造成能够将协同固定植入物从管腔结构内递送到外科部位,使得协同固定植入物有助于将附属物在目标区域处保持就位。
2、在一些实施方案中,附属物可被配置为需要来自第一外科器械和第二外科器械中的每一者的相互作用,以能够植入附属物。在一些实施方案中,附属物可被配置为需要来自位于患者的管腔结构之外的第一体腔内的相互作用以及来自管腔结构内的相互作用,以能够植入附属物。
3、在另一方面,提供了一种系统,并且该系统可包括数据处理器和存储被配置为能够使得数据处理器执行操作的指令的存储器。操作可包括:从第一内窥镜的第一图像传感器实时地接收表征第一外科器械的第一图像的第一图像数据,第一外科器械设置在患者的第一体腔内并且位于患者的管腔结构之外,第一外科器械被构造成能够将附属物递送到位于管腔结构处的目标区域;从第二内窥镜的第二图像传感器实时地接收表征设置在管腔结构内的第二外科器械的第二图像的第二图像数据,第二外科器械被配置为能够将协同固定植入物从管腔结构内递送到目标区域,使得协同固定植入物有助于在目标区域处保持就位,第二外科器械位于第一内窥镜的视场之外,并且第一外科器械位于第二内窥镜的视场之外;基于所接收的第一图像数据来确定第一外科器械的第一位置;基于所接收的第二图像数据来确定第二外科器械的第二位置;以及基于所确定的第一位置和第二位置来协调第一外科器械和第二外科器械之间的协同运动。
4、在一些实施方案中,附属物可被配置为需要来自第一外科器械和第二外科器械中的每一者的相互作用,以能够植入附属物。在一些实施方案中,附属物可被配置为需要来自位于患者的管腔结构之外的第一体腔内的相互作用以及来自管腔结构内的相互作用,以能够植入附属物。
5、在另一方面,提供了一种方法,该方法可包括:由控制器从第一内窥镜的第一图像传感器实时地接收表征第一外科器械的第一图像的第一图像数据,第一外科器械设置在患者的第一体腔内并且位于患者的管腔结构之外,第一外科器械被构造成能够将附属物递送到位于管腔结构处的目标区域;由控制器从第二内窥镜的第二图像传感器实时地接收表征设置在管腔结构内的第二外科器械的第二图像的第二图像数据,第二外科器械被构造成能够将协同固定植入物从管腔结构内递送到目标区域,使得附属物由协同固定植入物在目标区域处保持就位,第二外科器械位于第一内窥镜的视场之外,并且第一外科器械位于第二内窥镜的视场之外;由控制器基于所接收的第一图像数据来确定第一外科器械的第一位置;由控制器基于所接收的第二图像数据来确定第二外科器械相对于第一外科器械的第一位置的第二位置;以及由控制器基于所确定的第一位置和第二位置来协调第一外科器械和第二外科器械之间的协同运动。
6、在一些实施方案中,附属物可能需要来自第一外科器械和第二外科器械中的每一者的相互作用,以用于将附属物植入到目标区域处。在一些实施方案中,附属物可能需要来自位于患者的管腔结构之外的第一体腔内的相互作用以及来自管腔结构内的相互作用,以用于将附属物植入到目标区域处。
7、在另一方面,提供了一种系统,并且该系统可包括:第一外科器械,该第一外科器械被构造成能够插入到患者的胸部体腔中并且在位于患者体内的组织的第一表面上操作;第二外科器械,该第二外科器械被构造成能够插入到患者的腹部体腔中并且在组织的第二表面上操作,第二表面与第一表面不同地定向;第一内窥镜,该第一内窥镜具有第一图像传感器,该第一图像传感器被配置为能够获取第一外科器械在胸部体腔内的第一图像,并且被定位成使得第二外科器械不在第一图像传感器的视场内;第二内窥镜,该第二内窥镜具有第二图像传感器,该第二图像传感器被配置为能够获取第二外科器械在腹部体腔内的第二图像,并且被定位成使得第一外科器械不在第二图像传感器的视场内;和控制器,该控制器被配置为能够接收第一图像和第二图像,以确定第一外科器械和第二外科器械相对于彼此的第一位置和第二位置,以及通过基于所确定的第一位置和第二位置在彼此不同的方向上对第一外科器械和第二外科器械的致动器施加相互关联的限制来协调第一外科器械和第二外科器械之间的协同治疗。
8、在一些实施方案中,控制器可被配置为能够控制针对第一外科器械和第二外科器械之间的协同力和运动的运动。在一些实施方案中,组织可以至少部分地锚定到相邻的解剖结构,使得成比例量的协同力被传递到与相邻的解剖结构连接的组织中。在一些实施方案中,组织可以被锚定到周围的解剖结构。在一些实施方案中,组织可以是将第一胸部体腔和第二腹部体腔分开的共同的组织壁。在一些实施方案中,控制器可被配置为能够基于来自第二外科器械在共同组织上施加的力和运动来限制来自第一外科器械在共同组织上施加的力和运动。
9、在另一方面,提供了一种系统,并且该系统可包括数据处理器和存储被配置为能够使得数据处理器执行操作的指令的存储器。操作可包括:从第一内窥镜的第一图像传感器实时地接收表征第一外科器械的第一图像的第一图像数据,第一外科器械设置在患者的胸部体腔内并且被构造成能够在位于患者体内的组织的第一表面上操作;从第二内窥镜的第二图像传感器实时地接收表征第二外科器械的第二图像的第二图像数据,第二外科器械设置在患者的腹部体腔内并且在组织的第二表面上操作,第二表面与第一表面不同地定向,第二外科器械位于第一内窥镜的视场之外,并且第一外科器械位于第二内窥镜的视场之外;基于所接收的第一图像数据来确定第一外科器械的第一位置;基于所接收的第二图像数据来确定第二外科器械相对于第一外科器械的第一位置的第二位置;以及协调第一外科器械和第二外科器械之间的协同治疗以在组织上实现共同的外科目的,其中组织的协同治疗包括基于所确定的第一位置和第二位置在彼此不同的方向上对第一外科器械和第二外科器械的致动器施加相互关联的限制。
10、在一些实施方案中,操作还可以包括控制针对第一外科器械和第二外科器械之间的协同力和运动的运动。在一些实施方案中,组织可以至少部分地锚定到相邻的解剖结构,使得成比例量的协同力被传递到与相邻的解剖结构连接的组织中。在一些实施方案中,组织可以被锚定到周围的解剖结构。在一些实施方案中,组织可以是将第一胸部体腔和第二腹部体腔分开的共同的组织壁。在一些实施方案中,至少一个数据处理器可被配置为能够基于来自第二外科器械在共同组织上施加的力和运动来限制来自第一外科器械在共同组织上施加的力和运动。
11、在另一方面,提供了一种方法,该方法可包括:由控制器从第一内窥镜的第一图像传感器实时地接收表征第一外科器械的第一图像的第一图像数据,第一外科器械设置在患者的第一胸部体腔内并且被构造成能够在位于患者体内的组织的第一表面上操作;由控制器从第二内窥镜的第二图像传感器实时地接收表征第二外科器械的第二图像的第二图像数据,第二外科器械设置在患者的第二腹部体腔内并且在组织的第二表面上操作,第二表面与第一表面不同地定向,第二外科器械位于第一内窥镜的视场之外,并且第一外科器械位于第二内窥镜的视场之外,第二腹部体腔与第一胸部体腔不同;由控制器基于所接收的第一图像数据来确定第一外科器械的第一位置;由控制器基于所接收的第二图像数据来确定第二外科器械相对于第一外科器械的第一位置的第二位置;以及由控制器协调第一外科器械和第二外科器械之间的协同治疗以在组织上实现共同的外科目的,其中组织的协同治疗包括基于所确定的第一位置和第二位置在彼此不同的方向上对第一外科器械和第二外科器械的致动器施加相互关联的限制。
12、在一些实施方案中,可以控制针对第一外科器械和第二外科器械之间的协同力和运动的运动。在一些实施方案中,组织可以至少部分地锚定到相邻的解剖结构,使得成比例量的协同力被传递到与相邻的解剖结构连接的组织中。在一些实施方案中,组织可以被锚定到周围的解剖结构。在一些实施方案中,组织可以是将胸部体腔和腹部体腔分开的共同的组织壁。在一些实施方案中,可基于来自第二外科器械在共同组织上施加的力和运动来限制来自第一外科器械在共同组织上施加的力和运动。
13、在另一方面,提供了一种系统,并且该系统可包括:第一外科器械,该第一外科器械被构造成能够插入到患者的第一体腔中并且能够在位于患者体内的组织的第一表面上操作;该第二外科器械,该第二外科器械被构造成能够插入到患者的第二体腔中并且能够在组织的第二表面上操作,第二表面与第一表面不同地定向;第一内窥镜,该第一内窥镜具有第一图像传感器,第一图像传感器被配置为能够获取第一外科器械在第一体腔内的第一图像,并且被定位成使得第二外科器械不在第一图像传感器的视场内;第二内窥镜,该第二内窥镜具有第二图像传感器,该第二图像传感器被配置为能够获取第二外科器械在第二体腔内的第二图像,并且被定位成使得第一外科器械不在第二图像传感器的视场内,第二体腔与第一体腔不同;和控制器,控制器被配置为能够接收第一图像和第二图像,以基于接收到的第一图像确定第一外科器械的第一位置,根据第二图像确定第二外科器械的第二位置,以及通过由第一外科器械或第二外科器械在第一方向上操纵共同组织,基于所确定的第一位置和第二位置协调第一外科器械和第二外科器械之间的协同治疗,使得当在第一方向上操纵组织时,第一外科器械或第二外科器械中的另一者治疗组织。
14、在一些实施方案中,第一外科器械和第二外科器械之间的力可被控制以在两者之间产生预定义的运动或力中的至少一者。在一些实施方案中,第一体腔可在患者体内的第一中空器官内,第一外科器械可被构造成能够在中空器官内在第一方向上操纵共同组织,并且第二体腔可在中空器官之外。在一些实施方案中,第一外科器械可被构造成能够提供共同组织的组织偏转、回缩或移动中的至少一种,使得第二外科器械能够进入以解剖共同组织的一部分。在一些实施方案中,通过第一内窥镜的第一图像传感器对共同组织的可视化可被配置为能够允许通过第二外科器械解剖共同组织的至少一部分。
15、在另一方面,提供了一种系统,并且该系统可包括数据处理器和存储被配置为能够使得数据处理器执行操作的指令的存储器。操作可包括:从第一内窥镜的第一图像传感器实时地接收表征第一外科器械的第一图像的第一图像数据,第一外科器械设置在患者的第一体腔内并且被构造成能够在位于患者体内的组织的第一表面上进行操作;从第二内窥镜的第二图像传感器实时地接收表征第二外科器械的第二图像的第二图像数据,第二外科器械设置在患者的第二体腔内并且在组织的第二表面上进行操作,第二表面与第一表面不同地定向,第二外科器械位于第一内窥镜的视场之外,并且第一外科器械位于第二内窥镜的视场之外,第二体腔与第一体腔不同;基于所接收的第一图像数据来确定第一外科器械的第一位置;基于所接收的第二图像数据来确定第二外科器械的第二位置;以及基于所确定的第一位置和第二位置,协调第一外科器械和第二外科器械之间的协同治疗以在组织上实现共同的外科目的,其中组织的协同治疗包括通过第一外科器械或第二外科器械在第一方向上操纵共同组织,使得当在第一方向上操纵共同组织时,第一外科器械或第二外科器械中的另一者治疗共同组织。
16、在一些实施方案中,第一外科器械和第二外科器械之间的力可被控制以在两者之间产生预定义的运动或力中的至少一者。在一些实施方案中,第一体腔可在患者体内的第一中空器官内,第一外科器械可被构造成能够在中空器官内在第一方向上操纵共同组织,并且第二体腔可在中空器官之外。在一些实施方案中,第一外科器械可被构造成能够提供共同组织的组织偏转、回缩或移动中的至少一种,使得第二外科器械能够进入以解剖共同组织的一部分。在一些实施方案中,通过第一内窥镜的第一图像传感器对共同组织的可视化可被配置为能够允许通过第二外科器械解剖共同组织的至少一部分。
17、在另一方面,提供了一种方法,该方法可包括:由控制器从第一内窥镜的第一图像传感器实时地接收表征第一外科器械的第一图像的第一图像数据,第一外科器械设置在患者的第一体腔内并且被构造成能够在位于患者体内的组织的第一表面上进行操作;由控制器从第二内窥镜的第二图像传感器实时地接收表征第二外科器械的第二图像的第二图像数据,第二外科器械设置在患者的第二体腔内并且在组织的第二表面上进行操作,第二表面与第一表面不同地定向,第二外科器械位于第一内窥镜的视场之外,并且第一外科器械位于第二内窥镜的视场之外,第二体腔与第一体腔不同;由控制器基于所接收的第一图像数据来确定第一外科器械的第一位置;由控制器基于所接收的第二图像数据来确定第二外科器械的第二位置;以及由控制器基于所确定的第一位置和第二位置来协调第一外科器械和第二外科器械之间的协同治疗,以在组织上实现共同的外科目的,包括通过第一外科器械或第二外科器械在第一方向上操纵共同组织,使得当在第一方向上操纵共同组织时,第一外科器械或第二外科器械中的另一者治疗共同组织。
18、在一些实施方案中,第一外科器械和第二外科器械之间的力可被控制以在两者之间产生预定义的运动或力中的至少一者。在一些实施方案中,第一体腔可在患者体内的第一中空器官内,第一外科器械可在中空器官内在第一方向上操纵共同组织,并且第二体腔可在中空器官之外。在一些实施方案中,第一外科器械可提供共同组织的组织偏转、回缩或移动中的至少一种,使得第二外科器械能够进入以解剖共同组织的一部分。在一些实施方案中,通过第一内窥镜的第一图像传感器对共同组织的可视化可被配置为能够允许通过第二外科器械解剖共同组织的至少一部分。
本文地址:https://www.jishuxx.com/zhuanli/20240614/86609.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表