一种白车身自动生产线地面保洁装置和方法与流程
- 国知局
- 2024-07-10 17:13:13
本发明属于生产线清洁,具体的说是一种白车身自动生产线地面保洁装置和方法。
背景技术:
1、焊装是汽车生产的重要环节,随着柔性化需求的增加,线体间转运形式对柔性的需求也随之提高。agv作为焊装线体车身转运的新载体,其使用具有自动、柔性等特点,但是,由于焊接飞溅产生焊渣,agv经过时,驱动轮极易出现打滑现象,无法精确启停。人工清理时需拉空线体,而清线,铺线都需要额外的工时、能源及存储空间,增加成本。因此,研究新型的agv传输车身的焊装自动生产线地面保洁方法,有助于保障线体正常运行。同时,该方法规避了保洁导致的线体拉空和铺线时间,有助于提高生产效率。
2、当前无相关专利针对agv在焊装传输车身时遇到的此问题进行解决。
技术实现思路
1、针对以上问题,本发明提供了一种白车身自动生产线地面保洁装置和方法,包括处理器、动力模块、运动模块、清洁模块、辅助模块、柔性对接单元和agv刚性连接装置,柔性对接单元包括:传感器感应板、连接块、第一精定位结构和接口,能够与agv刚性连接装置连接;连接块固定在清洁模块上,连接块一侧设有传感器感应板,连接块中部设有第一精定位结构,第一精定位结构为喇叭口型,第一精定位结构中部设有接口;清洁模块包括依次设置的前置清洁部、视觉识别部、干冰清理部和后置清洁部;本发明可有效对地面的粘接飞溅进行清理,保障线体agv的正常工作。同时,该方法避免了人工清理所需的线体拉空、铺线时间,提高了生产效率。
2、本发明技术方案如下,一种白车身自动生产线地面保洁装置,包括:
3、处理器:负责对清洁模块的行进路线进行记录,控制清洁模块在使用柔性对接单元与agv绑定后,实现同步启停,对前置清洁部清洁完后的效果进行确认并分析是否需要后置清洁部的再次清洁,对单线体的最大能源及干冰需求记录分析;
4、动力模块:包括电池、充电和供电线路,对装置的运行及清洁提供动力;
5、运动模块:包括电机和制动装置,负责装置的行进;
6、清洁模块:负责首次清洁,视觉识别清洁后信息及二次清洁,脏物和干冰的存储也在此模块;清洁模块上设有柔性对接单元,能够与agv刚性连接装置对接;
7、辅助模块:此模块主要有辅助调试人员操作的操作屏,输入输出接线口,与agv同步行动的传感装置,识别障碍物的安全装置;
8、agv刚性连接装置。
9、进一步的,柔性对接单元包括:传感器感应板、连接块、第一精定位结构和接口。
10、连接块固定在清洁模块上,连接块一侧设有传感器感应板,连接块中部设有第一精定位结构,第一精定位结构为喇叭口型,第一精定位结构中部设有接口。
11、进一步的,连接块两侧设有第一硬限位装置和第二硬限位装置,其中一个硬限位装置上设有传感器感应板。
12、进一步的,第一精定位结构通过z向浮动装置和y向浮动装置与连接块连接,z向浮动装置能够控制第一精定位结构沿z轴方向运动,y向浮动装置能够控制第一精定位结构沿y轴方向运动。
13、进一步的,agv刚性连接装置,包括:到位传感器、第三硬限位装置、第二精定位结构、伸缩杠、插头、连接板和第四硬限位装置;
14、连接板两侧设有第三硬限位装置和第四硬限位装置,其中一个硬限位装置上设有到位传感器;连接板中部设有第二精定位结构,第二精定位结构内部设有伸缩杠,端部设有插头,伸缩杠能够控制插头伸缩,第二精定位结构能够与第一精定位结构插接匹配。
15、进一步的,清洁模块包括依次设置的前置清洁部、视觉识别部、干冰清理部和后置清洁部;
16、前置清洁部,主要由外部的毛刷和中部的负压吸附装置组成,随agv前进,毛刷将驱动轮和码带处的未粘结焊渣扫至中间位置后,由负压装置进行吸附;
17、视觉识别部,通过拍照收集舵轮和色带码带的清理后状态,并反馈给处理器,由处理器对比调试初期的最初地面状态,确认出粘结焊渣并发出再清洁指令,如无粘结焊渣,择不进行再清洁指令输出;
18、干冰清理部,当收到再清洁指令后,由喷枪喷出干冰颗粒,附着的焊渣急速降温收缩脱离附着面,为后续的清洁提供条件;
19、后置清洁部,毛刷再次将焊渣扫至中间位置后,由负压装置进行吸附。
20、一种白车身自动自动生产线地面清洁方法,包括以下步骤:
21、s1当线体生产时,清洁装置在操作者发送信息后,从规划好的清洁装置存放区域出发,到达指定位置时,通过柔性对接单元与agv连接,进行清洁;
22、s2清洁装置与agv的行进信息绑定,同步启停,当驶出线体时,agv通过识别码带的特定信息,转弯时,清洁装置与agv会断开联开连接,通过识别码带完成转弯;
23、s3完成转弯动作后,agv识别转弯结束的特定码带,清洁装置与agv会重新对接并继续行进;
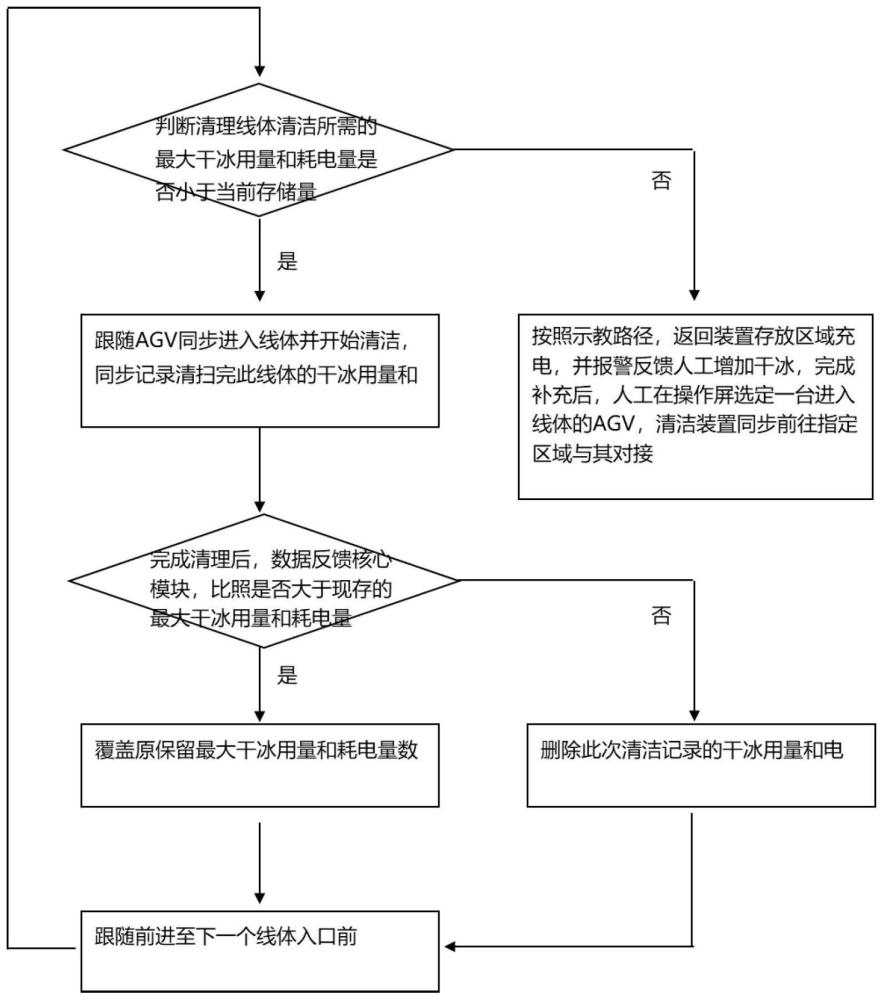
24、s4agv判断清理线体所需最大干冰用量和耗电量是否小于当前存储量,若是,则继续步骤s5;若否则按照示教路径,返回装置存放区域充电,并人工报警反馈干冰不足;
25、s5进入线体开始清洁,记录清扫完成此线体的干冰用量;
26、s6清理完成后,将数据反馈,对比此次清理是否大于现存的最大干冰用量和耗电量,若是,则覆盖原保留最大干冰用量和耗电量;若否,则删除此次清洁记录的干冰用量和耗电量。
27、本发明的有益效果为:
28、本发明可有效对地面的粘接飞溅进行清理,保障线体agv的正常工作。同时,该方法避免了人工清理所需的线体拉空、铺线时间,提高了生产效率。
技术特征:1.一种白车身自动生产线地面保洁装置,其特征在于,包括:处理器:负责对清洁模块的行进路线进行记录,控制清洁模块在使用柔性对接单元与agv绑定后,实现同步启停,对前置清洁部清洁完后的效果进行确认并分析是否需要后置清洁部的再次清洁,对单线体的最大能源及干冰需求记录分析;
2.根据权利要求1所述的一种白车身自动生产线地面保洁装置,其特征在于,柔性对接单元包括:传感器感应板、连接块、第一精定位结构和接口;
3.根据权利要求2所述的一种白车身自动生产线地面保洁装置,其特征在于,连接块两侧设有第一硬限位装置和第二硬限位装置,其中一个硬限位装置上设有传感器感应板。
4.根据权利要求3所述的一种白车身自动生产线地面保洁装置,其特征在于,第一精定位结构通过z向浮动装置和y向浮动装置与连接块连接,z向浮动装置能够控制第一精定位结构沿z轴方向运动,y向浮动装置能够控制第一精定位结构沿y轴方向运动。
5.根据权利要求4所述的一种白车身自动生产线地面保洁装置,其特征在于,agv刚性连接装置,包括:到位传感器、第三硬限位装置、第二精定位结构、伸缩杠、插头、连接板和第四硬限位装置;
6.根据权利要求1至5任一项所述的一种白车身自动生产线地面保洁装置,其特征在于,清洁模块包括依次设置的前置清洁部、视觉识别部、干冰清理部和后置清洁部;
7.一种白车身自动自动生产线地面清洁方法,其特征在于,包括以下步骤:
技术总结本发明公开了一种白车身自动生产线地面保洁装置和方法,属于生产线清洁技术领域,包括处理器、动力模块、运动模块、清洁模块、辅助模块、柔性对接单元和AGV刚性连接装置,柔性对接单元包括:传感器感应板、连接块、第一精定位结构和接口,能够与AGV刚性连接装置连接;连接块固定在清洁模块上,连接块一侧设有传感器感应板,连接块中部设有第一精定位结构,第一精定位结构为喇叭口型,第一精定位结构中部设有接口;清洁模块包括依次设置的前置清洁部、视觉识别部、干冰清理部和后置清洁部;本发明可有效对地面的粘接飞溅进行清理,保障线体AGV的正常工作。同时,该方法避免了人工清理所需的线体拉空、铺线时间,提高了生产效率。技术研发人员:周牧,周川川,李金宝,张洪羽,张星,陈明,姜一帆,宋思源,刘宝峰,蔡金生受保护的技术使用者:中国第一汽车股份有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240615/61976.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。