一种绳驱动外肢体机械臂碰撞力检测反馈系统及方法
- 国知局
- 2024-07-05 17:53:55
本技术涉及机器人,尤其涉及一种绳驱动外肢体机械臂碰撞力检测反馈系统及方法。
背景技术:
1、中国专利《械臂碰撞力检测系统、方法、电子设备和存储介质》(公开号:cn114043477a),公开了一种机械臂碰撞力检测系统,其根据力检测单元的受力检测结果,获取机械臂的碰撞力的检测结果。能够在不影响机械臂的灵活性的前提下,有效检测出机械臂所受到的碰撞力以及碰撞发生的位置。但是,该系统通过力检测传感器矩阵式排列,用力检测传感器单元对外部碰撞和机械臂之间碰撞力和位置进行检测,力检测传感器较多,系统复杂;当机械臂与机械臂之间发生碰撞时,机械臂重新规划当前机械臂的轨迹躲避其余机械臂,当检测到外部碰撞信息后,通过碰撞力的检测结果停止机械臂并采用界面显示等方式提示医生,并没有将力的位置和大小反馈至人体,不能够快速得到碰撞信息,人机交互性较低。
技术实现思路
1、本技术的实施例提供一种绳驱动外肢体机械臂碰撞力检测反馈系统及方法,不仅能够减少机械臂单面上的传感器数量,而且可以将碰撞信息反馈至人体手部,使机械臂和操作者进行交互,实现人机合一。
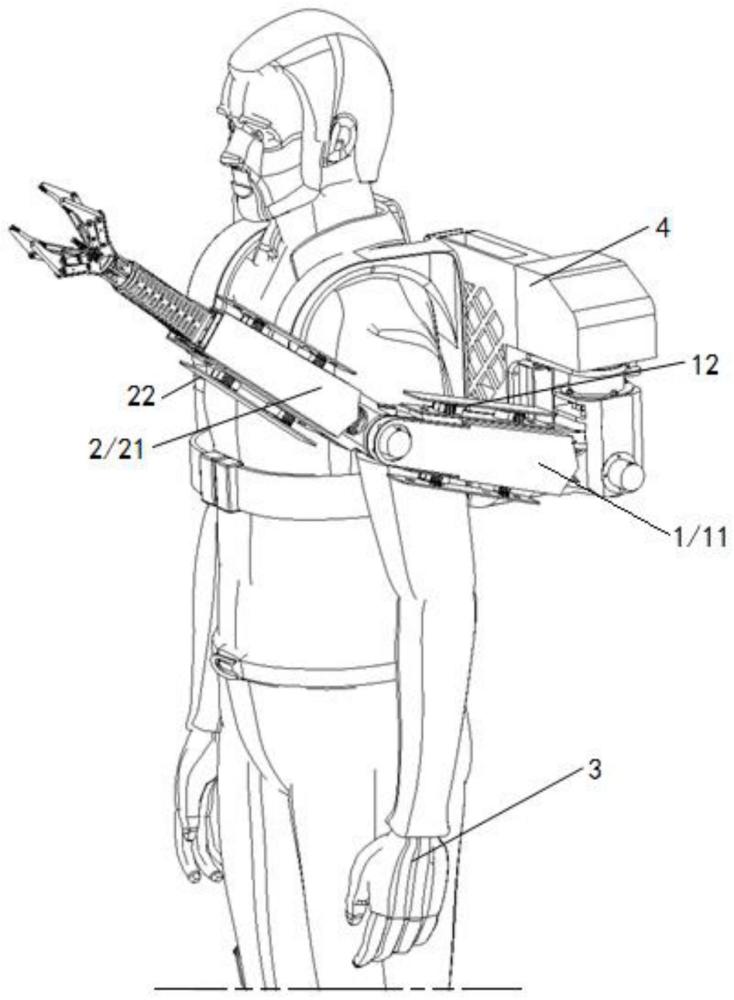
2、为达到上述目的,一方面,本技术的实施例提供了一种绳驱动外肢体机械臂碰撞力检测反馈系统,包括大臂碰撞检测装置、小臂碰撞检测装置、振动反馈智能手套和控制单元;所述大臂碰撞检测装置设置在所述绳驱动外肢体机械臂的大臂外侧;所述小臂碰撞检测装置设置在所述绳驱动外肢体机械臂的小臂外侧;所述大臂碰撞检测装置能够检测所述大臂受到的撞击力;所述小臂碰撞检测装置能够检测所述小臂受到的撞击力;所述振动反馈智能手套穿戴在操作者的手上;所述振动反馈智能手套内设有振动电机组;所述控制单元与所述大臂碰撞检测装置、所述小臂碰撞检测装置和所述振动电机组均通信连接;所述控制单元被配置为:接收所述大臂碰撞检测装置和所述小臂碰撞检测装置检测到的压力值;将压力值输入碰撞压力方程中,得到机械臂碰撞外力值;判断机械臂碰撞外力值是否大于阈值;若是,则将压力值输入碰撞位置方程中得到机械臂碰撞位置值;根据机械臂碰撞外力值和机械臂碰撞位置值调节振动电机组中对应的振动电机的振动频率和振动幅度并控制其振动。
3、进一步地,所述大臂碰撞检测装置包括大臂左右碰撞检测机构和大臂上下碰撞检测机构;所述大臂左右碰撞检测机构能够检测大臂左右方向上的撞击力;所述大臂上下碰撞检测机构能够检测大臂上下方向上的撞击力;所述小臂碰撞检测装置包括小臂左右碰撞检测机构和小臂上下碰撞检测机构;所述小臂左右碰撞检测机构能够检测小臂左右方向上的撞击力;所述小臂上下碰撞检测机构能够检测小臂上下方向上的撞击力。
4、进一步地,所述大臂左右碰撞检测机构包括左右扣合的大臂左右侧碰撞顶壳和大臂左右侧碰撞底壳;所述大臂左右侧碰撞顶壳和大臂左右侧碰撞底壳的前端均铰接在机械臂的肘关节处所述大臂左右侧碰撞顶壳和大臂左右侧碰撞底壳之间形成第一安装腔;所述第一安装腔内设有两个第一压力传感器;两个第一压力传感器分别靠近所述第一安装腔的前后两端设置;所述第一安装腔内还设有第一弹簧组;所述第一弹簧组的两端分别低接大臂左右侧碰撞顶壳和大臂左右侧碰撞底壳;所述大臂上下碰撞检测机构包括上下扣合的大臂上侧碰撞板和大臂下侧碰撞板;所述大臂上侧碰撞板和大臂下侧碰撞板之间形成第二安装腔;所述第二安装腔内设有两个第二压力传感器;两个第二压力传感器分别靠近所述第二安装腔的前后两端设置;所述第二安装腔内还设有第二弹簧组;所述第二弹簧的两端分别连接大臂上侧碰撞板和大臂下侧碰撞板。
5、进一步地,所述第一压力传感器包括传感器上盖、传感器按压机构、橡胶垫、传感器外壳和传感器本体;所述传感器外壳为圆桶状;所述传感器外壳的侧壁下端开设凹槽;所述传感器上盖与所述传感器外壳相互扣合;所述传感器本体的一端固连在所述传感器外壳的底面上,另一端经所述凹槽伸出所述传感器外壳后与控制单元连接;所述传感器按压机构的下端位于所述传感器外壳内,上端穿过所述传感器上盖上的通孔;所述橡胶垫固连在所述传感器按压机构的下表面上;所述第二压力传感器与所述第一压力传感器的结构相同。
6、进一步地,所述所述大臂左右侧碰撞底壳上设有两个第一传感器安装槽,所述第一压力传感器装在对应的所述第一传感器安装槽内,且两个所述第一压力传感器相向设置;所述大臂左右侧碰撞顶壳上设有两个第一压力杆;所述第一压力杆位于所述第一压力传感器的上方;所述大臂下侧碰撞板上设有两个第二传感器安装槽,所述第二压力传感器装在对应的所述第二传感器安装槽内,且两个所述第二压力传感器相向设置;所述大臂上侧碰撞板上设有两个第二压力杆;所述第二压力杆位于所述第二压力传感器的上方。
7、进一步地,所述小臂左右碰撞检测机构包括左右扣合的小臂左右侧碰撞顶壳和小臂左右侧碰撞底壳;所述小臂左右侧碰撞顶壳和小臂左右侧碰撞底壳之间形成第三安装腔;所述第三安装腔内设有两个第三压力传感器;两个第三压力传感器分别靠近所述第三安装腔的前后两端设置;所述第三安装腔内还设有第三弹簧组;所述第三弹簧组的两端分别连接小臂左右侧碰撞顶壳和小臂左右侧碰撞底壳;所述第三压力传感器与所述第一压力传感器的结构相同。
8、进一步地,所述小臂上下碰撞检测机构的结构与所述大臂上下碰撞检测机构的结构相同。
9、进一步地,所述振动电机组包括八个振动电机;八个振动电机沿左右方向依次排列;八个振动电机分别可以反馈大臂左右撞击力、大臂上下撞击力、小臂左右撞击力和小臂上下撞击力的大小和位置。
10、进一步地,所述碰撞压力方程和所述碰撞位置方程通过matlab数学软件采用多项式拟合得出。
11、另一方面,本技术实施例还提供了一种基于上述绳驱动外肢体机械臂碰撞力检测反馈系统的碰撞力检测反馈方法,包括以下步骤:大臂碰撞检测装置和所述小臂碰撞检测装置检测到压力值;控制单元接收所述大臂碰撞检测装置和所述小臂碰撞检测装置检测到的压力值;控制单元将压力值输入碰撞压力方程中,得到机械臂碰撞外力值;控制单元判断机械臂碰撞外力值是否大于阈值;若是,则将压力值输入碰撞位置方程中得到机械臂碰撞位置值;控制单元根据机械臂碰撞外力值和机械臂碰撞位置值调节振动电机组中对应的振动电机的振动频率和振动幅度并控制其振动。
12、本技术相比现有技术具有以下有益效果:
13、1、本技术实施例绳驱动外肢体机械臂碰撞力检测反馈系统,通过在机械臂单面上设置两个压力传感器,并将两个压力传感器的检测结果输入通过matlab数学软件采用多项式拟合得出的碰撞压力方程和碰撞位置方程中,从而实现对机械臂的碰撞力和碰撞位置的检测,并通过设置智能振动反馈手套,将碰撞力大小和碰撞位置信息通过振动电机振动强度和振动模式传递至人体手部,使机械臂和操作者进行交互,实现人机合一。
14、2、本技术实施例绳驱动外肢体机械臂碰撞力检测反馈系统通过对压力传感器的触发装置进行改进,解决了现有薄膜式压力传感器接触面接触不充分,容易导致压力传感器接触不良的问题。
15、3、本技术实施例绳驱动外肢体机械臂碰撞力检测反馈系统通过设置定位杆和定位槽,使压力杆能够准确的压在传感器槽中的压力传感器上,并通过设置弹簧确保在无碰撞力情况下,压力杆与压力传感器始终分离,降低了碰撞误检率。
16、4、本技术实施例绳驱动外肢体机械臂碰撞力检测反馈系统解决了传统的基于力观测器的无传感器碰撞检测方法,由于绳驱动外肢体机器人机械臂的驱动电机集中在背包内,通过绳索驱动,存在较大摩擦,而无法对其进行检测的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49547.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表