一种气动肌肉机器人的有限时间同步运动控制方法及系统
- 国知局
- 2024-07-05 17:53:52
本发明涉及机器人控制,尤其涉及一种气动肌肉机器人的有限时间同步运动控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
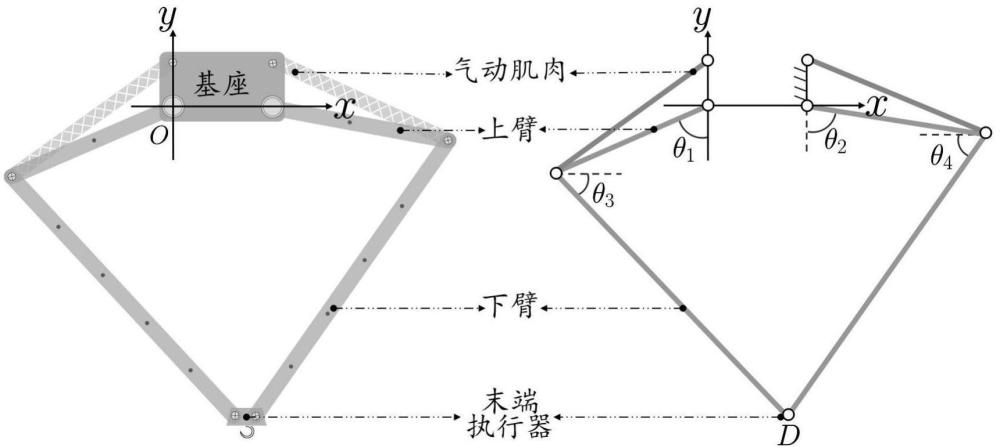
2、为了给生产、生活活动提供更便捷实用的服务,稳定性好、灵活性强的智能机器人越来越受欢迎。然而,传统刚性串联机器人的结构稳定性、柔韧性较差且存在累积误差,很难完成受限工作空间下的高性能运动。为此,气动肌肉驱动并联机器人得到了研究人员的广泛关注。这类机器人融合了气动肌肉这一仿生物骨骼肌驱动器和多运动链并联结构的双重特点,具有承载能力强、结构稳定性高、工作空间小、柔顺性好等特性,可以为医疗协作、康复治疗、环境勘探等兼具刚柔需求的应用提供助力。
3、由于气动肌肉驱动并联机器人的固定基座和末端执行器之间至少由两条运动链相连接,所以末端执行器的高效运动需要通过所有运动链协同配合来实现,这意味着并联机器人的高性能控制不仅取决于每一条运动链的控制性能,还与所有运动链间的同步性能密切相关。然而,大多数现有方法仅考虑了运动链的跟踪性能,忽略了并联结构同步性的影响,易导致控制精度下降。此外,现有同步运动控制方法大多是基于关节空间进行设计与分析,且需要模型信息或线性化操作,无法对末端执行器运动进行直接调节,工作效率不高,实际适用范围受限;基于笛卡尔空间的同步运动控制方法在参考轨迹平行于坐标轴的位置处会出现控制器奇异性问题,这会给驱动元件的正常使用造成严重威胁,不利于机器人系统的安全运行。
4、因此,如何设计合理的同步运动控制方法提高气动肌肉驱动并联机器人的运动性能,保证末端执行器可以快速、准确地跟踪参考轨迹是亟待解决的问题。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种气动肌肉机器人的有限时间同步运动控制方法及系统,直接以末端执行器为控制对象、以实现笛卡尔空间内的轨迹跟踪为目标,实现了高精度和高效率的气动肌肉机器人运动控制。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
3、本发明第一方面提供了一种气动肌肉机器人的有限时间同步运动控制方法,包括以下步骤:
4、获取气动肌肉驱动并联机器人的状态参数,并根据状态参数建立运动学模型和动力学模型;
5、获取气动肌肉驱动并联机器人需要跟踪的末端执行器参考轨迹,根据参考轨迹和实际运行轨迹的对比结果得到末端执行器的跟踪误差;
6、定义轮廓误差,根据末端执行器的跟踪误差和轮廓误差获得坐标轴方向上的同步误差,进而得到同步运动控制的等价目标;
7、基于末端执行器的跟踪误差和坐标轴方向上的同步误差定义耦合误差,并结合跟踪误差和耦合误差构造有限时间自适应同步运动控制器。
8、进一步的,结合几何分析和气动肌肉的三元素模型,建立运动学模型和以气压为输入的动力学模型。
9、进一步的,定义轮廓误差为:ε=x-xrs,
10、其中,ε为轮廓误差,x为实际位置d的位置坐标,xrs表示参考轨迹上距离实际位置d最近的点drs的位置坐标;
11、在控制器设计中对轮廓误差进行估计,即
12、
13、其中,为轮廓误差估计,xts表示参考位置dr处切线上距离实际位置d最近的点dts的位置坐标。
14、进一步的,气动肌肉驱动并联机器人的运动控制需要跟踪误差和轮廓误差估计收敛到原点。
15、进一步的,设计如下关于坐标轴方向上跟踪误差的同步误差:
16、
17、其中,es为同步误差,e为跟踪误差,是参考轨迹在点dr处的单位法向量。
18、更进一步的,定义如下耦合误差:
19、ec=e+λ0es=λe,
20、其中,ec为耦合误差,λ=i+λoφ为耦合增益,是正的常数,是单位矩阵。
21、进一步的,有限时间自适应同步运动控制器为:
22、
23、其中,p为有限时间自适应同步运动控制器,j为雅可比矩阵,θ为上臂转动角度,xr为末端执行器在笛卡尔空间内的参考轨迹,e为末端执行器的跟踪误差,为滤波器信号,λ为耦合增益,h0为标称值矩阵,υ1和υ2为要设计的正定对角矩阵,γ为满足的常数,γ1和γ2是正的奇数,α是正的常数,为正的常数,和分别为模糊逻辑系统中权重w和逼近误差界ρ的估计,和χ分别为模糊逻辑系统中的基函数向量和输入向量。
24、本发明第二方面提供了一种气动肌肉机器人的有限时间同步运动控制系统,包括:
25、模型构建模块,被配置为获取气动肌肉驱动并联机器人的状态参数,并根据状态参数建立运动学模型和动力学模型;
26、跟踪误差计算模块,被配置为获取气动肌肉驱动并联机器人需要跟踪的末端执行器参考轨迹,根据参考轨迹和实际运行轨迹的对比结果得到末端执行器的跟踪误差;
27、同步误差计算模块,被配置为定义轮廓误差,根据末端执行器的跟踪误差和轮廓误差获得坐标轴方向上的同步误差,进而得到同步运动控制的等价目标;
28、控制器设计模块,被配置为基于末端执行器的跟踪误差和坐标轴方向上的同步误差定义耦合误差,并结合跟踪误差和耦合误差构造有限时间自适应同步运动控制器。
29、本发明第三方面提供了一种介质,其上存储有程序,该程序被处理器执行时实现如本发明第一方面所述的气动肌肉机器人的有限时间同步运动控制方法中的步骤。
30、本发明第四方面提供了一种设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本发明第一方面所述的气动肌肉机器人的有限时间同步运动控制方法中的步骤。
31、以上一个或多个技术方案存在以下有益效果:
32、本发明公开了一种气动肌肉机器人的有限时间同步运动控制方法及系统,和现有技术相比,本发明充分考虑了机器人系统中直接与物体交互、完成任务的单元为末端执行器,进而在笛卡尔空间中对末端执行器进行运动分析与控制器设计,便于更直观地获得末端执行器的运动效果以及施加合适的控制量,提升了控制精度。
33、本发明中考虑了实际系统模型结构复杂、存在建模误差、系统参数难获得等不确定性问题,提出了一种不需要模型信息的同步运动控制器,且通过改进耦合误差,系统输入信号不会出现影响驱动元件使用的奇异性问题,提高了运行安全性。
34、本发明中考虑了气动肌肉驱动并联机器人的多运动链同步问题,并利用坐标轴方向上的跟踪误差进行了同步补偿,能够保证可调时间内的误差有界以及最终的误差渐近收敛,具有收敛速度快和跟踪精度高双重优点。
35、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种气动肌肉机器人的有限时间同步运动控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种气动肌肉机器人的有限时间同步运动控制方法,其特征在于,结合几何分析和气动肌肉的三元素模型,建立运动学模型和以气压为输入的动力学模型。
3.如权利要求1所述的一种气动肌肉机器人的有限时间同步运动控制方法,其特征在于,定义轮廓误差为:ε=x-xrs,
4.如权利要求3所述的一种气动肌肉机器人的有限时间同步运动控制方法,其特征在于,气动肌肉驱动并联机器人的运动控制需要跟踪误差和轮廓误差估计收敛到原点。
5.如权利要求1所述的一种气动肌肉机器人的有限时间同步运动控制方法,其特征在于,设计如下关于坐标轴方向上跟踪误差的同步误差:
6.如权利要求5所述的一种气动肌肉机器人的有限时间同步运动控制方法,其特征在于,定义如下耦合误差:
7.如权利要求1所述的一种气动肌肉机器人的有限时间同步运动控制方法,其特征在于,有限时间自适应同步运动控制器为:
8.一种气动肌肉机器人的有限时间同步运动控制系统,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,其中存储有多条指令,所述指令适于由终端设备的处理器加载并执行权利要求1-7中任一项所述的气动肌肉机器人的有限时间同步运动控制方法。
10.一种终端设备,其特征在于,包括处理器和计算机可读存储介质,处理器用于实现各指令;计算机可读存储介质用于存储多条指令,所述指令适于由处理器加载并执行权利要求1-7中任一项所述的气动肌肉机器人的有限时间同步运动控制方法。
技术总结本发明公开了一种气动肌肉机器人的有限时间同步运动控制方法及系统,涉及机器人控制技术领域。该方法包括步骤:获取气动肌肉驱动并联机器人的状态参数,并建立运动学模型和动力学模型;获取气动肌肉驱动并联机器人需要跟踪的末端执行器参考轨迹,得到末端执行器的跟踪误差;定义轮廓误差,根据末端执行器的跟踪误差和轮廓误差获得坐标轴方向上的同步误差,进而得到同步运动控制的等价目标;基于末端执行器的跟踪误差和坐标轴方向上的同步误差定义耦合误差,并结合跟踪误差和耦合误差构造有限时间自适应同步运动控制器。本发明直接以末端执行器为控制对象、以实现笛卡尔空间内的轨迹跟踪为目标,实现了高精度和高效率的气动肌肉机器人运动控制。技术研发人员:孙宁,刁淑贞,吴庆祥,杨桐受保护的技术使用者:南开大学技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49544.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表