一种三四五阶魔方的智能机器人的制作方法
- 国知局
- 2024-07-05 17:53:53
本发明涉及魔方智能机器人控制,具体为一种三四五阶魔方的智能机器人。
背景技术:
1、魔方又叫鲁比克方块,最早是由匈牙利布达佩斯建筑学院厄尔诺·鲁比克教授于1974年发明的机械益智玩具,魔方拥有竞速、盲拧、单拧等多种玩法,风靡程度经久未衰;通常意义下的魔方是指狭义的三阶魔方,三阶魔方形状通常是正方体,由有弹性的硬塑料制成,常规竞速玩法是将魔方打乱,然后在最短的时间内复原,广义的魔方指各类可以通过转动打乱和复原的几何体。
2、但现有技术中,市场上的魔方通常为三阶手动魔方,需要人为将其转动打乱和复原,而现阶段这种需手动转动的三阶魔方可为玩家提供的乐趣较低,且当玩家将魔方转动打乱后,由于玩家无法正确记忆起魔方的转动打乱顺序,玩家无法及时将魔方复原,从而无法更好的达到训练魔方技能及其益智的效果,针对上述问题,提出一种三四五阶魔方的智能机器人。
技术实现思路
1、本发明的目的在于提供一种三四五阶魔方的智能机器人,以解决上述背景技术提出的现有的三阶魔方在玩耍时,对于玩家所提供的乐趣及益智效果较差的问题。
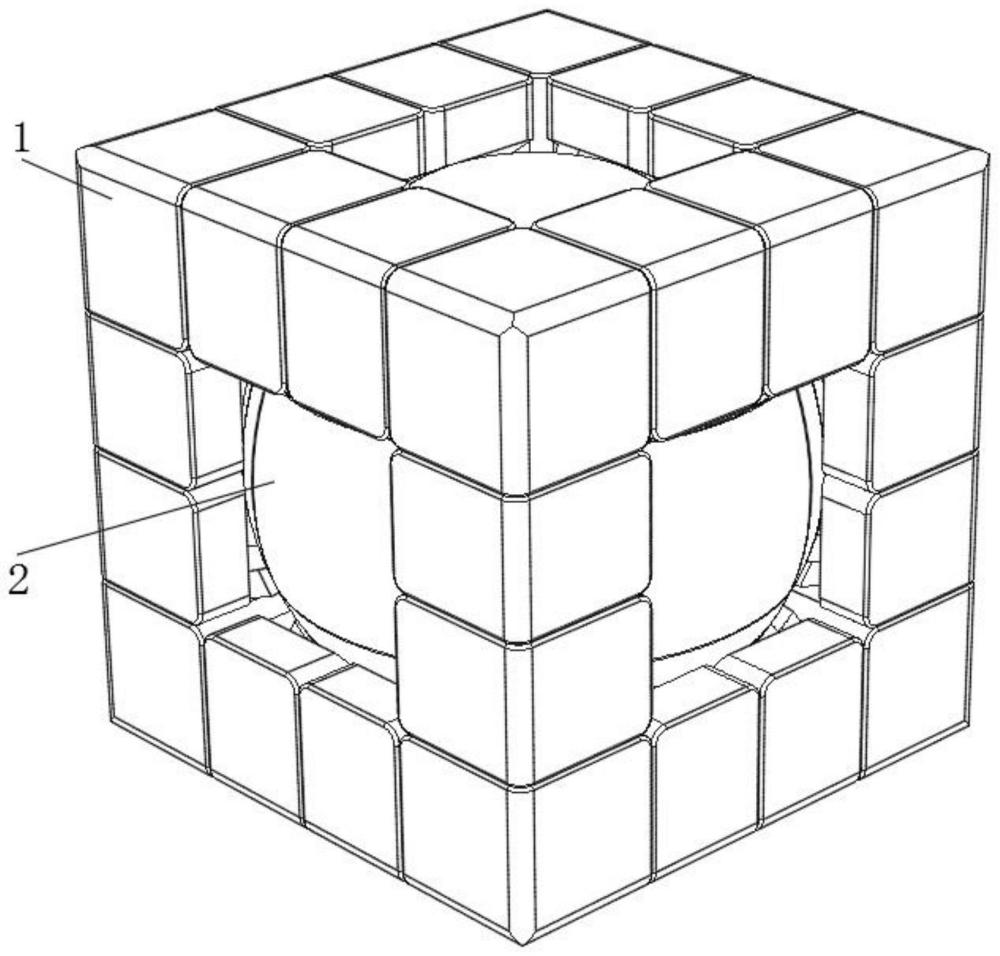
2、为实现上述目的,本发明提供如下技术方案:一种三四五阶魔方的智能机器人,包括控制组件和魔方组件,所述控制组件为球体状,所述魔方组件安装于控制组件的外表面,所述控制组件包括辅助连接件一、辅助连接件二、内轨道、驱动电机一、齿轮、侧棱块通讯连接线、中心块通讯连接线、四角块通讯连接线和中心组件,所述内轨道的数量为两个,且两个所述内轨道对称固定安装在中心组件的外表面,所述驱动电机一的输出端与齿轮的一端固定连接,所述齿轮的外壁与内轨道的外壁相啮合,所述中心组件包括控制体、驱动电机二和输出轴,所述控制体的内部设置有中央主板,且所述控制体的外侧固定连接有通讯主板,所述控制体的形状为正方体,所述控制体的六个面均安装有中心轴,所述驱动电机二的一端与中心轴的一端固定连接,且所述驱动电机二的输出端与输出轴的一端固定连接,所述驱动电机二的外侧套接有套筒,所述套筒的一端设置有固定件,所述输出轴的一端设置有顶块。
3、优选的,所述驱动电机一、驱动电机二、输出轴和套筒的数量均为六个,所述驱动电机二上安装有电源正极、电源负极、调速控制极、正反转控制极和转速信号输出控制极。
4、优选的,所述辅助连接件一的数量为十二个,所述辅助连接件二的数量为二十四个,所述辅助连接件二的一端内嵌于固定件的一侧。
5、优选的,所述魔方组件包括四角块、侧棱块和中心块,所述四角块的数量为八个,所述侧棱块的数量为二十四个,所述中心块的数量为二十四个。
6、优选的,所述中心块的一端内嵌于顶块的底部,所述侧棱块的一端内嵌于辅助连接件一的一端。
7、优选的,所述侧棱块通讯连接线的一端与侧棱块的内侧连接,且所述侧棱块通讯连接线的另一端与驱动电机二的外壁连接。
8、优选的,所述中心块通讯连接线的一端与中心块的内侧连接,且所述中心块通讯连接线的另一端与驱动电机二的外壁连接。
9、优选的,所述四角块通讯连接线的一端与四角块的内侧连接,且所述四角块通讯连接线的另一端与驱动电机二的外壁连接。
10、与现有技术相比,本发明的有益效果是:
11、本发明中,该四阶魔方由中心的控制组件和外围的魔方组件构成,控制体的内部安装有中央主板,且控制体的外壁安装有通讯主板,通讯主板中有多级电极组成的通讯模块,通讯主板的信号线与驱动电机二的各个极片连接,玩家通过控制端可依次控制各个驱动电机一和驱动电机二转动,当六个驱动电机二转动时,可以带动魔方各面的最外层转动,驱动电机一转动时,齿轮沿着内轨道转动,实现魔方内层转动,从而使四阶魔方的内层和外层转动将魔方打乱,玩家可以通过控制端实现该四阶魔方的转动,同时控制端可以自动记录多个驱动电机的转动顺序,当玩家无法将魔方复原时,可以通过控制端的记录辅助完成复原,增加玩魔方乐趣的同时提高益智程度,适合大范围推广。
技术特征:1.一种三四五阶魔方的智能机器人,其特征在于,包括控制组件(2)和魔方组件(1),所述控制组件(2)为球体状,所述魔方组件(1)安装于控制组件(2)的外表面,所述控制组件(2)包括辅助连接件一(21)、辅助连接件二(22)、内轨道(24)、驱动电机一(26)、齿轮(27)、侧棱块通讯连接线(28)、中心块通讯连接线(29)、四角块通讯连接线(30)和中心组件(31),所述内轨道(24)的数量为两个,且两个所述内轨道(24)对称固定安装在中心组件(31)的外表面,所述驱动电机一(26)的输出端与齿轮(27)的一端固定连接,所述齿轮(27)的外壁与内轨道(24)的外壁相啮合,所述中心组件(31)包括控制体(311)、驱动电机二(313)和输出轴(314),所述控制体(311)的内部设置有中央主板(316),且所述控制体(311)的外侧固定连接有通讯主板(312),所述控制体(311)的形状为正方体,所述控制体(311)的六个面均安装有中心轴(322),所述驱动电机二(313)的一端与中心轴(322)的一端固定连接,且所述驱动电机二(313)的输出端与输出轴(314)的一端固定连接,所述驱动电机二(313)的外侧套接有套筒(315),所述套筒(315)的一端设置有固定件(25),所述输出轴(314)的一端设置有顶块(23)。
2.根据权利要求1所述的一种三四五阶魔方的智能机器人,其特征在于:所述驱动电机一(26)、驱动电机二(313)、输出轴(314)和套筒(315)的数量均为六个,所述驱动电机二(313)上安装有电源正极(317)、电源负极(318)、调速控制极(319)、正反转控制极(320)和转速信号输出控制极(321)。
3.根据权利要求1所述的一种三四五阶魔方的智能机器人,其特征在于:所述辅助连接件一(21)的数量为十二个,所述辅助连接件二(22)的数量为二十四个,所述辅助连接件二(22)的一端内嵌于固定件(25)的一侧。
4.根据权利要求1所述的一种三四五阶魔方的智能机器人,其特征在于:所述魔方组件(1)包括四角块(11)、侧棱块(12)和中心块(13),所述四角块(11)的数量为八个,所述侧棱块(12)的数量为二十四个,所述中心块(13)的数量为二十四个。
5.根据权利要求4所述的一种三四五阶魔方的智能机器人,其特征在于:所述中心块(13)的一端内嵌于顶块(23)的底部,所述侧棱块(12)的一端内嵌于辅助连接件一(21)的一端。
6.根据权利要求4所述的一种三四五阶魔方的智能机器人,其特征在于:所述侧棱块通讯连接线(28)的一端与侧棱块(12)的内侧连接,且所述侧棱块通讯连接线(28)的另一端与驱动电机二(313)的外壁连接。
7.根据权利要求4所述的一种三四五阶魔方的智能机器人,其特征在于:所述中心块通讯连接线(29)的一端与中心块(13)的内侧连接,且所述中心块通讯连接线(29)的另一端与驱动电机二(313)的外壁连接。
8.根据权利要求4所述的一种三四五阶魔方的智能机器人,其特征在于:所述四角块通讯连接线(30)的一端与四角块(11)的内侧连接,且所述四角块通讯连接线(30)的另一端与驱动电机二(313)的外壁连接。
技术总结本发明公开了一种三四五阶魔方的智能机器人,涉及魔方智能机器人控制技术领域,包括控制组件和魔方组件,所述控制组件为球体状,所述魔方组件安装于控制组件的外表面,所述控制组件包括辅助连接件一、辅助连接件二、内轨道、驱动电机一、齿轮、侧棱块通讯连接线、中心块通讯连接线、四角块通讯连接线和中心组件。本发明中,该魔方由控制组件和魔方组件构成,玩家通过控制端可依次控制各个驱动电机一和驱动电机二转动,从而使四阶魔方的内层和外层转动将魔方打乱,同时控制端可以自动记录多个驱动电机的转动顺序,当玩家无法将魔方复原时,通过控制端的记录辅助完成复原,增加玩魔方乐趣的同时提高益智程度,适合大范围推广。技术研发人员:姜东良受保护的技术使用者:深圳市澳湾科技有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49545.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。