用于触觉刺激器的精确多维移动的系统和方法与流程
- 国知局
- 2024-07-08 10:50:20
本发明涉及触觉刺激装置。
背景技术:
1、已知多种触觉刺激装置。这些装置可以用于多种目的。在一些情况下,这些装置具有通用目的,而在其他情况下,这些装置则具有特定目的。例如,这样的装置可以具有通用目的,诸如配置为用于缓解疼痛或进行治疗,诸如以治疗肌肉疲劳或酸痛,从而改善血液循环等。这些装置也可以具有特定目的。
2、在一些情况下,触觉刺激器可以包括不具有移动部件的物体。在这种情况下,用户通常需要手动操纵刺激器。例如,触觉刺激器可以是简单的球。用户可以用手在他们的身体上按压和滚动球,诸如在肌肉拉伤部位的皮肤上按压和滚动球。
3、其他触觉刺激器具有移动元件。移动元件可以诸如由用户手动移动,也可以自动。例如,用户经常在酸痛的肌肉上使用滚动杆,方法是握住滚动杆的每端处的把手,然后在受影响的肌肉区域上来回移动中间可滚动部分。另一个示例是,组织枪可以由电力驱动,并且包括一个或多个用于移动枪的头部部分的马达,诸如以使头部部分振动。然后,用户仍需手动握住枪,并且将枪的头部手动放置成与期望的区域接触。
4、其他机动触觉刺激装置也是已知的,诸如在uspn8,936,544中公开的装置。该装置包括用于移动环并且收缩或放松环的马达驱动的致动器。然而,该装置仍然必须手动定位,而且该装置的动力运动或移动受到限制。
5、期望一种改进的方法和装置来精确地移动触觉刺激器。
技术实现思路
1、本发明的各个方面包括用于控制触觉刺激装置的位置、包括自动移动触觉刺激装置的系统和方法。
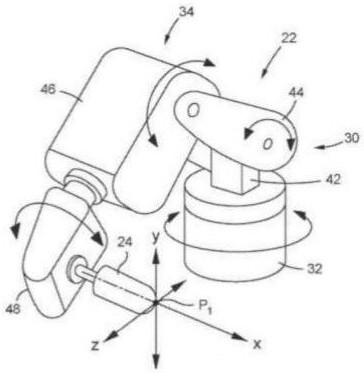
2、在一个实施例中,机器人触觉刺激器包括机器人支架,该支架被配置为移动触觉刺激装置。优选地,所述机器人支架能够优选地在三维空间中移动所述触觉刺激装置。在x、y和/或z方向上的移动可以被独立地控制,并且可以参照指定点或指定位置被独立地控制。
3、在一个实施例中,可以由机器人触觉刺激器的控制器利用包含与时间相关的x、y和z坐标的数据组的程序来控制机器人支架的移动,并且因此控制触觉刺激装置。所述数据组可以由独立的x、y和z函数生成。在一个实施例中,这些函数可以具有不同的持续时间,其中这些函数中的一个或多个可以被重复,从而导致机器人支架的运动随时间发生变化。
4、在一个实施例中,机器人支架的移动相对于指定点或指定位置(诸如参考点)被控制。例如,参考点可以包括用户身体上的位置。
5、为了确定参考点,可以使用激光雷达或类似技术获取有关用户的一个或多个部位的位置/距离的信息。用户可以从其身体(或其部分)的激光雷达图中选择位置。可以使用位置函数来生成相对于指定参考点的x、y和z位置数据。
6、在一些实施例中,触觉刺激装置的移动可以模拟其他物体的移动,并且/或者与视频或声音同步。
7、机器人触觉刺激器可以与一个或多个外部装置或网络进行通信。例如,在一个实施例中,用户可以通过移动通信装置与机器人触觉刺激器通信。例如,用户可以利用由该装置和移动通信装置的一个或多个输入装置显示的图形用户界面来选择所期望的移动程序、修改或创建新的移动程序等。
8、本发明的其他方面包括机器人触觉刺激装置停止或冻结功能,以及用户认证和/或同意功能。
9、机器人触觉刺激器可以用于控制各种触觉刺激装置的移动,包括那些本身被设计为可移动的装置。例如,机器人触觉刺激器可以用于移动一个或多个触觉刺激装置,以治疗肌肉或用于医疗原因,或者用于提供快感。
10、当结合附图考虑时,与现有技术相比,本发明的其它目的、特征和优点将从以下附图的详细描述中变得显而易见。
技术特征:1.一种机器人触觉刺激器,该机器人触觉刺激器包括:
2.根据权利要求1所述的机器人触觉刺激器,其中,所述机器人支架包括6轴机器人。
3.根据权利要求1所述的机器人触觉刺激器,其中,所述触觉刺激装置包括性刺激装置。
4.根据权利要求1所述的机器人触觉刺激器,其中,所述触觉刺激装置可拆卸地连接到所述机器人支架的所述头部。
5.根据权利要求1所述的机器人触觉刺激器,其中,所述x位置坐标由第一函数限定,所述y位置坐标由第二函数限定,并且所述z位置坐标由第三函数限定。
6.根据权利要求5所述的机器人触觉刺激器,其中,所述第一函数具有第一持续时间,所述第二函数具有第二持续时间,并且所述第三函数具有第三持续时间。
7.根据权利要求1所述的机器人触觉刺激器,其中,所述参考点使用光检测和测距装置确定。
8.根据权利要求1所述的机器人触觉刺激器,其中,在所述触觉刺激器通过所述机器人支架移动期间,所述数据组将x、y和z位置坐标限定为与由音频装置呈现的音频同步和/或与由至少一个视频显示器呈现的视频同步。
9.一种移动触觉刺激器的方法,该方法包括以下步骤:
10.根据权利要求9所述的方法,该方法还包括以下步骤:确定物体的一个或多个部分的位置,所述参考点与所述物体相关联。
11.根据权利要求10所述的方法,其中,使用光检测和测距装置确定所述位置。
12.根据权利要求9所述的方法,其中,所述x、y和z函数中的一个或多个函数是震荡函数。
13.根据权利要求9所述的方法,该方法还包括将所述x、y和z值存储在与所述控制器相关联的存储器中。
14.根据权利要求9所述的方法,其中,定义所述x函数、所述y函数和所述z函数的所述步骤包括接收从用户到移动通信装置的至少一个输入。
15.一种机器人触觉刺激器,该机器人触觉刺激器包括:
16.一种机器人触觉刺激器,该机器人触觉刺激器包括:
17.根据权利要求16所述的机器人触觉刺激器,其中,所述第一函数、所述第二函数和所述第三函数均具有振幅特征和时间特征中的至少一个,所述振幅特征和所述时间特征被配置为由用户修改。
18.根据权利要求17所述的机器人触觉刺激器,其中,所述第一函数、所述第二函数和所述第三函数均具有振幅特征和时间特征。
19.根据权利要求16所述的机器人触觉刺激器,其中,所述第一函数具有第一时间持续时间,所述第二函数具有第二时间持续时间,并且所述第三函数具有第三时间持续时间,并且其中所述第一、第二和第三时间持续时间彼此不同。
20.根据权利要求19所述的机器人触觉刺激器,其中,所述第一函数、所述第二函数和所述第三函数中的至少一个被配置为能够重复,由此使所述可移动支座的运动随时间发生变化。
21.根据权利要求16所述的机器人触觉刺激器,其中,所述第一函数、所述第二函数和所述第三函数中的每一个均选自由正弦函数、方波函数、修正方波函数和斜坡函数组成的组。
22.根据权利要求16所述的机器人触觉刺激器,其中,所述第一函数、所述第二函数和所述第三函数中的至少一个具有冻结位置,在该冻结位置中,所述控制器使所述可移动支座在当前位置立即停止移动,由此防止从期望位置到不期望位置的不期望运动。
23.根据权利要求16所述的机器人触觉刺激器,其中,所述第一函数、所述第二函数和所述第三函数存储在所述存储器中,其中,所述一个或多个数据组由所述控制器执行所述第一、第二和第三函数而生成,并且其中,所述控制器被配置为接收用户输入,该用户输入改变所述第一、第二和/或第三函数中的至少一个函数的至少一个特性。
24.一种移动触觉刺激器的方法,该方法包括以下步骤:
25.根据权利要求24所述的方法,其中,所述x、y和z方向控制函数中的一个或多个是震荡函数。
26.根据权利要求24所述的方法,该方法还包括接收来自用户的输入以修改所述x方向控制函数、所述y方向控制函数和所述z方向控制函数中的至少一个方向控制函数的步骤。
27.根据权利要求24所述的方法,其中,所述x方向控制函数、所述y方向控制函数和所述z方向控制函数均具有振幅特征和时间特征中的至少一个,所述振幅特征和所述时间特征中的至少一个被配置为由用户修改。
28.根据权利要求27所述的方法,其中,所述x方向控制函数、所述y方向控制函数和所述z方向控制函数均具有振幅特征和时间特征。
29.根据权利要求24所述的方法,其中,所述x方向控制函数具有第一持续时间,所述y方向控制函数具有第二持续时间,并且所述z方向控制函数具有第三持续时间,并且其中,所述第一、第二和第三时间持续时间彼此不同。
30.根据权利要求29所述的方法,其中,所述x方向控制函数、所述y方向控制函数和所述z方向控制函数中的至少一个被配置为能够重复,由此使所述可移动支座的运动随时间发生变化。
31.根据权利要求24所述的方法,其中,所述x方向控制函数、所述y方向控制函数和所述z方向控制函数中的每一个都选自由正弦函数、方波函数、修正方波函数和斜坡函数组成的组。
32.一种经由机器人支架对触觉刺激器的移动进行用户控制的方法,该方法包括以下步骤:
33.根据权利要求32所述的方法,其中,接收输入的所述步骤包括接收来自用户的移动装置的输入。
34.根据权利要求33所述的方法,该方法还包括使所述用户的移动装置显示所述x、y和/或z方向控制函数的图形表示的步骤。
35.根据权利要求34所述的方法,其中,所述输入包括触碰输入,所述触碰输入用于拖动所述图形表示中的一个的至少一部分。
技术总结一种机器人触觉刺激器,该机器人触觉刺激器包括被配置为移动触觉刺激装置的机器人支架。机器人支架可以优选地在三维空间中移动触觉刺激装置。在x、y和/或z方向上的移动可以被独立地控制,并且可以参考可以与人体相关联的指定点或位置。可以使用激光雷达来获取关于用户的一个或多个部位的位置/距离的信息,以用于控制触觉刺激装置的位置。触觉刺激装置的移动可以模拟其他物体的移动和/或可以与视频或声音同步。技术研发人员:A·弗莱萨斯受保护的技术使用者:A·弗莱萨斯技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50512.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表