一种基于电机驱动的机器人关节结构
- 国知局
- 2024-07-08 10:58:21
本技术涉及机器人关节,特别是一种基于电机驱动的机器人关节结构。
背景技术:
1、现有的机器人关节,大多只能进行弯曲动作--其通过旋转的电机来带动实现,例如公告号为cn115519581b的专利便是此类结构。
2、但如上述专利的这类关节结构只能实现两个臂节的弯曲,而无法实现两个臂节之间的轴向旋转(例如仿生机器人手肘处只能弯曲、脚肘部只能完全,依靠腰部处的旋转来实现转向),可真实人类在手肘、脚肘处是能进行一定程度的轴向转动的。
3、目前有一些大型机器人的关节既能弯曲、也能转动,但结构通常都比较复杂,类似的结构不适用于小型机器人关节。
4、为此,本方案设计一种结构简单、且灵巧的机器人关节结构,既能适用于小型机器人关节、又能适用于大型机器人关节。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供一种结构简单、在一个关节处既能进行弯曲又能转动、具有优异支撑力和提升力的基于电机驱动的机器人关节结构。
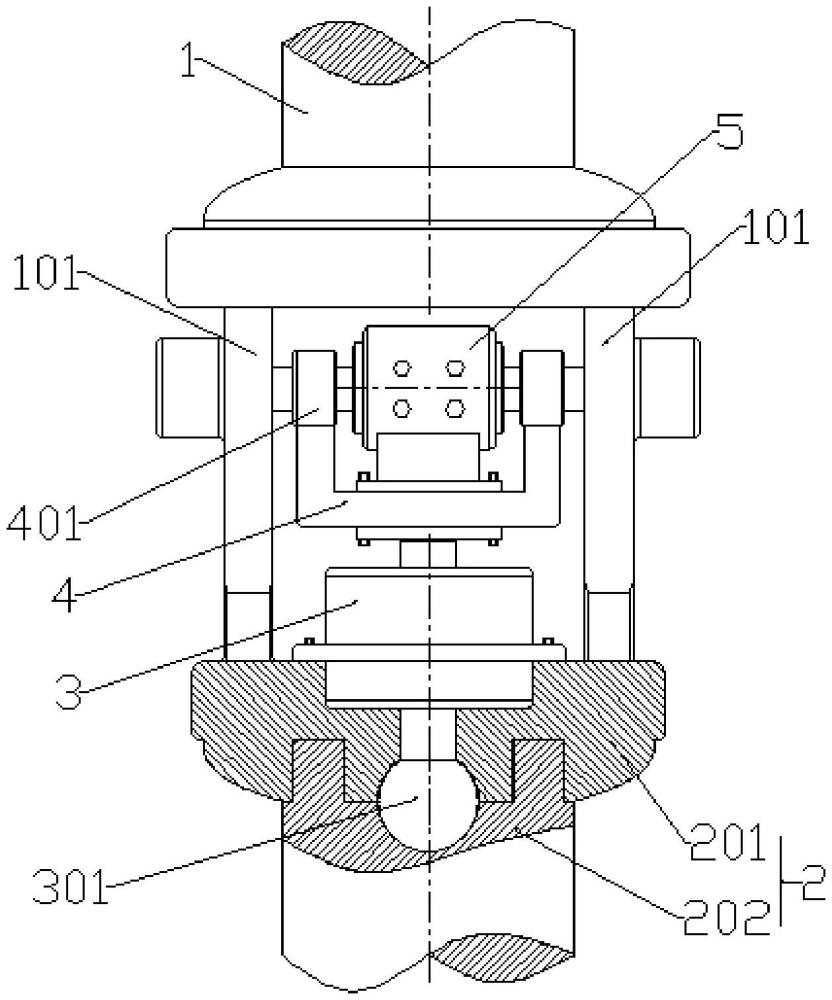
2、本实用新型的目的通过以下技术方案来实现:一种基于电机驱动的机器人关节结构,包括相互连接的第一节臂、第二节臂;
3、所述第一节臂的下端面具有左右位置相对的两个侧耳;
4、所述第二节臂的上端面处固定有电机a,电机a的输出轴上固定有u型拨件;
5、所述u型拨件上固定有电机b,电机b的输出轴与对应的侧耳相连;所述u型拨件具有两个伸出臂,电机b的输出轴能转动地从伸出臂穿过后与对应的侧耳固定相连;
6、当第一节臂与第二节臂进行弯曲动作时:电机a保持锁紧,电机b经侧耳带动第一节臂转动作;当第一节臂与第二节臂进行相互转动时:电机b保持锁紧,电机a经u型拨件作用在电机b的输出轴上,电机b的输出轴作用在侧耳上让第一节臂动作。
7、作为本申请优选的技术方案,所述电机b为双出轴自锁步进电机,其两端伸出的输出轴与两个侧耳相连。
8、作为本申请优选的技术方案,所述电机b的输出轴的两端为多棱柱状,侧耳上具有相应的多棱孔。
9、作为本申请优选的技术方案,所述第二节臂的上端面为平面;所述侧耳的下端面为圆弧面,该圆弧面以电机b的输出轴所处轴线位置为圆心;所述侧耳抵在第二节臂的上端面处,形成支撑结构;当第一节臂与第二节臂进行弯曲动作时,侧耳的下端面的弧形面的不同部位与第二节臂的上端面接触。这种设计利于第二节臂对第一节臂进行良好的支撑。
10、作为本申请优选的技术方案,所述电机a为盘式双出轴自锁步进电机,其输出轴的下端具有球头;所述第二节臂包括节帽、节杆,节帽螺纹拧在节杆的上端;所述节帽的下表面开有半球腔,节杆的上表面具有另一半球腔,当两者拧和后形成球形腔;电机a的输出轴的下端的球头位于该球形腔处。当第一节臂带动第二节臂向上提起时,第一节臂经侧耳、电机b的输出轴、u型拨件、电机a的输出轴作用在第二节臂上向上提起。这种设计利于第一节臂对第二节臂进行良好的提起。
11、作为本申请优选的技术方案,所述电机a固定在节帽上时,将电机a的机壳与输出轴拆开,该输出轴从下至上穿过节帽后伸入相应的机壳内。
12、作为本申请优选的技术方案,所述第二节臂中,当节帽与节杆螺纹配合后还经螺钉沿径向锁紧。
13、本方案的大致原理为:(1)通过电机b带动侧耳转动,侧耳带动第一节臂转动,实现第一节臂和第二节臂的弯曲;(2)通过电机a带动u型拨件转动,u型拨件经电机a的输出轴带动侧耳动作,实现了两个节臂的转动;(3)当两个节臂弯曲动作时侧耳的下端面的圆弧面在节帽的上表面滑动,当两个节臂进行转动时侧耳的下端面的圆弧边在节帽的上表面转动,即本方案的关节能同时进行弯曲、转动--灵活度高,并且在弯曲和转动的过程中节帽始终为侧耳提供向上的支撑力--支撑力道强;(4)当第一节臂将第二节臂向上提起时,经侧耳、电机b的输出轴、u型拨件、电机a的输出轴、球头作用在节帽上,这样的结构能提供较强的竖直方向的提升力。
14、本实用新型具有以下优点:
15、(1)结构集中、简单,缩小关节体积,利于应用于小型机器人;
16、实现两个节臂之间进行弯曲的结构、实现两个节臂之间的转动结构,是相互关联的(现有的为分离设计),这样能让结构更集中,能减小关节的体积,从而适用于小型机器人;
17、(2)结构巧妙、动作灵活;
18、现有的设计中,之所以将实现两个节臂之间弯曲的结构、实现两个节臂之间转动的结构通过不同位置来进行设计,是因为无法保证弯折动作、转动动作之间不会产生相互干扰;或者说即便能不互相干扰,也无法保证关节处的强度;
19、本方案中,两个节臂能同时进行弯曲、转动,动作灵活;并且在弯曲、转动的过程中,侧耳始终是与节帽的上表面接触的,这样能为关节处提供足够的支撑强度(例如本方案仿生机器人的脚肘处,仿生机器人上身具有一定重量,那么该关节结构无论是在弯曲还是在转动时,都能为上身提供足够的支撑力)。
20、(3)能提供足够的支撑力、提升力;
21、上段已提及能提供足够的支撑力--此处不再赘述;
22、由于第二节臂的下方可能负载一定重量,因此本方案中第一节臂经侧耳、电机b的输出轴、u型拨件、电机a的输出轴、球头作用在节帽上来向上提起第二节臂,则能保证足够的提升力(即本方案不依赖于输出轴与相应电机机壳的安装强度来提供提升力--这类结构的提升力有限,而是直接通过轴来传递提升力--提升力更强)。
技术特征:1.一种基于电机驱动的机器人关节结构,包括相互连接的第一节臂(1)、第二节臂(2),其特征在于:
2.根据权利要求1所述一种基于电机驱动的机器人关节结构,其特征在于:所述电机b(5)为双出轴自锁步进电机,其两端伸出的输出轴与两个侧耳(101)相连。
3.根据权利要求2所述一种基于电机驱动的机器人关节结构,其特征在于:所述电机b(5)的输出轴的两端为多棱柱状,侧耳(101)上具有相应的多棱孔。
4.根据权利要求1所述一种基于电机驱动的机器人关节结构,其特征在于:所述第二节臂(2)的上端面为平面;所述侧耳(101)的下端面为圆弧面,该圆弧面以电机b(5)的输出轴所处轴线位置为圆心;
5.根据权利要求1所述一种基于电机驱动的机器人关节结构,其特征在于:所述电机a(3)为盘式双出轴自锁步进电机,其输出轴的下端具有球头(301);
6.根据权利要求5所述一种基于电机驱动的机器人关节结构,其特征在于:所述电机a(3)固定在节帽(201)上时,将电机a(3)的机壳与输出轴拆开,该输出轴从下至上穿过节帽(201)后伸入相应的机壳内。
7.根据权利要求5所述一种基于电机驱动的机器人关节结构,其特征在于:所述第二节臂(2)中,当节帽(201)与节杆(202)螺纹配合后还经螺钉沿径向锁紧。
技术总结本技术涉及一种基于电机驱动的机器人关节结构,包括相互连接的第一节臂、第二节臂;所述第一节臂的下端面具有左右位置相对的两个侧耳;所述第二节臂的上端面处固定有电机A,电机A的输出轴上固定有U型拨件;所述U型拨件上固定有电机B,电机B的输出轴与对应的侧耳相连;所述U型拨件具有两个伸出臂,电机B的输出轴能转动地从伸出臂穿过后与对应的侧耳固定相连。本技术达到的有益效果是:结构简单;在一个关节处既能进行弯曲又能转动,既适用于小型机器人又适用于大型机器人;具有优于的支撑力、以及提升力。技术研发人员:李昀澄,孙明明受保护的技术使用者:西华大学技术研发日:20231115技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51314.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表