自主采矿车辆控制的制作方法
- 国知局
- 2024-07-09 17:26:46
本发明涉及控制自主操作的采矿车辆,并且特别是是涉及控制执行自主装载和运输循环的采矿车辆。
背景技术:
1、采矿或建筑挖掘工地(例如地下硬岩石或软岩石矿井)可包括用于采矿车辆(例如装载机和/或运输机器和钻凿设备,其也可以被称为(采矿)车辆)的自动操作的区域。这种车辆可以是无人驾驶的(例如从控制室远程控制的),或者是有人驾驶的采矿车辆(例如由车辆驾驶室中的操作员操作的车辆)。车辆可以被配置用以自主执行至少一些任务。在自动模式下操作的自动采矿车辆可以独立操作,并且至少对于工作任务或驾驶命令的某个(一些)部分没有外部控制,但是在某些操作区域或操作条件下(例如在紧急状态期间),可以在外部控制下进行操作。
2、一些采矿车辆(例如装载机或装载和运输设备(lhd))可以用于将挖掘出来的材料(例如矿石、岩石或沙子)从一个地方装载和运输到另一个地方,例如在挖掘之后从地下矿井装载位置到矿井外或到输送机运输设备或为卸载材料保留的场所。例如,采矿车辆可以被控制以执行自主装载和运输循环,该自主装载和运输循环可以包括将车辆驾驶到装载地点、装载车辆以及将车辆从装载地点驾驶到卸载地点。
3、完整的装载和运输循环的自动化是具有挑战性的。例如,由于铲斗-岩石相互作用的动态且不可预测的性质,研制在各种条件下都将会有效工作的自动化铲斗填充非常具有挑战性。装载控制器不仅需要管理挖掘臂的运动(例如吊臂和铲斗的位置),还需要基于装载设备平台的运动来管理穿透率。例如,当铲斗被致动以穿透岩石料堆时,作用在铲斗上的力可能会根据料堆中的岩石介质的性质、料堆的几何形状以及颗粒尺寸和几何形状的分布而显著变化。在自主装载和运输循环的某些阶段,例如当到达装载地点并且车辆的铲斗进入料堆时,采矿车辆的操作需要进行显著改变。
4、专利公开ep 3207187公开了一种控制自动铲斗装载的方法。从一组铲斗控制配置(profile)中选择铲斗控制配置,所述一组配置包括随采矿车辆相对于参考位置行进的距离而变的采矿车辆的吊臂的位置的指示。需要进一步改进对执行自主装载和运输循环的采矿车辆的控制。
技术实现思路
1、本发明由独立权利要求的特征限定。在从属权利要求中限定了一些特定实施例。
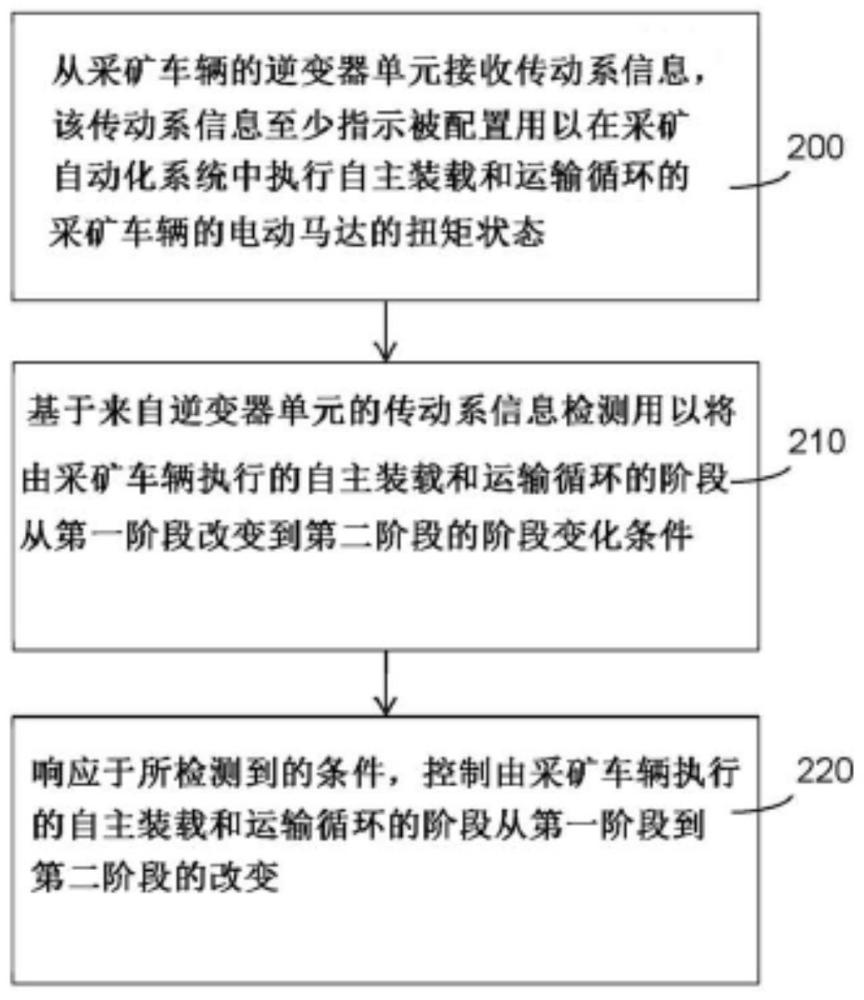
2、根据第一方面,提供了一种装置,该装置被配置用以执行以下操作或包括被配置用以执行以下操作的机构:从逆变器单元接收传动系信息,所述传动系信息至少指示被配置用以在采矿自动化系统中执行自主装载和运输循环的采矿车辆的电动马达的扭矩状态;基于来自逆变器单元的传动系信息,检测阶段变化条件,以用于将由采矿车辆执行的自主装载和运输循环的阶段从第一阶段改变到第二阶段;以及响应于所检测到的阶段变化条件,控制由采矿车辆执行的自主装载和运输循环的阶段从第一阶段到第二阶段的改变。
3、该机构可以包括一个或多个处理器和包含指令的存储器,所述指令在由所述一个或多个处理器执行时使得所述装置执行所述方法。
4、根据第二方面,提供了一种用于控制自主操作的采矿车辆的方法,该方法包括:从采矿车辆的逆变器单元接收传动系信息,所述传动系信息至少指示被配置用以在采矿自动化系统中执行自主装载和运输循环的采矿车辆的电动马达的扭矩状态;基于来自逆变器单元的传动系信息,检测阶段变化条件,以用于将由采矿车辆执行的自主装载和运输循环的阶段从第一阶段改变到第二阶段;以及响应于所检测到的阶段变化条件,控制由采矿车辆执行的自主装载和运输循环的阶段从第一阶段到第二阶段的改变。
5、根据第三方面,提供了一种装置,该装置包括至少一个处理器、包括计算机程序代码的至少一个存储器,所述至少一个存储器和所述计算机程序代码被配置用以与所述至少一个处理器核心一起使所述装置至少执行所述方法或所述方法的实施例。
6、根据第四方面,提供了一种计算机程序、计算机程序产品或(非有形的)计算机可读介质,其包括计算机程序代码,用于当在数据处理装置中执行时使所述装置执行所述方法或所述方法的实施例。
技术特征:1.一种用于控制采矿车辆(10)的装置,所述采矿车辆(10)被构造用以执行自主装载和运输循环,所述自主装载和运输循环包括在采矿自动化系统中以预定顺序执行的一序列操作阶段,所述装置包括至少一个处理器和至少一个存储器,所述至少一个存储器包括计算机程序代码,所述至少一个存储器和所述计算机程序代码被配置用以与所述至少一个处理器一起使所述装置至少执行以下操作:
2.根据权利要求1所述的装置,其中所述第一阶段和所述第二阶段包括自主驾驶阶段和自动装载阶段。
3.根据权利要求1或2所述的装置,其中所述至少一个存储器和所述计算机程序代码被配置用以与所述至少一个处理器一起使所述装置执行以下操作:响应于进入所述第二阶段,基于为所述自主装载和运输循环的所述第二阶段定义的一组控制参数来控制所述采矿车辆的吊臂(14)的位置、所述采矿车辆的铲斗的位置和/或所述采矿车辆的速度。
4.根据任一前述权利要求所述的装置,其中所述第一阶段和所述第二阶段是所述循环的或与所述循环相关联的自动自适应装载程序的阶段,所述自动自适应装载程序与一组控制配置相关联,以控制所述采矿车辆的铲斗(16)的和/或所述采矿车辆的吊臂(14)的位置,并且到所述第二阶段的改变导致执行从所述一组控制配置中选择出来的控制配置。
5.根据权利要求4所述的装置,其中所述至少一个存储器和所述计算机程序代码被配置用以与所述至少一个处理器一起使所述装置基于所述传动系信息来选择所述控制配置。
6.根据权利要求4或5所述的装置,其中所述控制配置包括扭矩参考数据,并且所述阶段变化条件是基于所述扭矩参考数据来检测的。
7.根据任一前述权利要求所述的装置,其中检测所述阶段变化条件包括检测到所述扭矩状态满足阈值,其中第一阈值被设置用以检测所述采矿车辆进入或接近料堆,并且第二阈值被设置用以检测所述采矿车辆进入驾驶停止元件。
8.根据任一前述权利要求所述的装置,其中来自所述逆变器单元(302)的所述传动系信息指示传动系转速和所述扭矩状态。
9.根据任一前述权利要求所述的装置,其中所述采矿车辆(10)包括至少两个电动马达,所述传动系信息包括至少两个扭矩状态输入,并且至少一个存储器和所述计算机程序代码被配置用以与所述至少一个处理器一起使所述装置执行以下操作:响应于所述扭矩状态输入中的至少一个扭矩状态输入满足阶段变化触发条件而检测所述状态变化条件。
10.根据任一前述权利要求所述的装置,其中检测所述变化条件还包括检测到轮打滑条件和/或时间阈值。
11.一种采矿车辆(10),包括任一前述权利要求所述的装置。
12.一种用于控制采矿车辆(10)的方法,所述采矿车辆(10)被构造用以执行自主装载和运输循环,所述自主装载和运输循环包括在采矿自动化系统中以预定顺序执行的一序列操作阶段,所述方法包括:
13.根据权利要求12所述的方法,还包括:响应于进入所述第二阶段,基于为所述自主装载和运输循环的所述第二阶段定义的一组控制参数来控制所述采矿车辆的吊臂(14)的位置、所述采矿车辆的铲斗的位置和/或所述采矿车辆的速度。
14.根据权利要求12或13所述的方法,其中所述第一阶段和所述第二阶段是所述循环的或与所述循环相关联的自动自适应装载程序的阶段,所述自动自适应装载程序与一组控制配置相关联,以控制所述采矿车辆的铲斗(16)的和/或所述采矿车辆的吊臂(14)的位置,并且到所述第二阶段的改变导致执行从所述一组控制配置中选择出来的控制配置。
15.一种计算机程序,包括代码,所述代码用于当在数据处理装置(500)中执行时使得执行根据权利要求12至14所述的方法。
技术总结根据本发明的一个示例方面,提供了一种方法,包括:从采矿车辆(10)的逆变器单元(302)接收(200)传动系信息,所述传动系信息至少指示被配置用以在采矿自动化系统中执行自主装载和运输循环的所述采矿车辆(10)的电动马达(304)的扭矩状态;基于来自所述逆变器单元的所述传动系信息,检测(210)阶段变化条件,以用于将由所述采矿车辆执行的所述自主装载和运输循环的阶段从第一阶段改变到第二阶段;以及响应于所检测到的所述阶段变化条件,控制(220)循环的阶段从所述第一阶段到所述第二阶段的改变。技术研发人员:贾里·贾苏,劳里·西沃恩受保护的技术使用者:山特维克矿山工程机械有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/58974.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。