一种可自动调平的农机作业平台
- 国知局
- 2024-07-17 13:37:51
本技术属于农业机械,具体涉及一种可自动调平的农机作业平台。
背景技术:
1、丘陵山区地带,受到自然条件的限制,地形复杂,相对于平原地区,在丘陵地带的耕地面积小而散,同时地块不规则且坡陡坎高,道路环境十分恶劣。因此,为了不浪费耕地面积,在陡坡上进行种植是十分重要事情。传统的农业机械设备无法很好的进行丘陵山区地带的农业作业,大量的坡地和不平整地形使得农业作业的人力成本十分高昂,为了保证农业作业的成功,导致劳动强度大还效率十分低下。
2、在农业作业机械设备中,采用自调平的作业平台,不仅可以很好在陡坡、坑地等进行高效率、高质量的农业作业,而且还可以在丘陵山地的不平整地形上保持稳定,降低翻倒的风险,提高效率和作业质量的同时,可以提高作业车辆的稳定性和安全性,具有重要意义。
技术实现思路
1、针对上述现有技术的缺点,本实用新型提出一种可自动调平的农机作业平台。其目的是为了解决现有农业作业机械设备,在丘陵山地及斜坡等地形环境下,作业平台无法保持水平的问题,从而提升作业质量,保持作业车辆的稳定性和安全性。
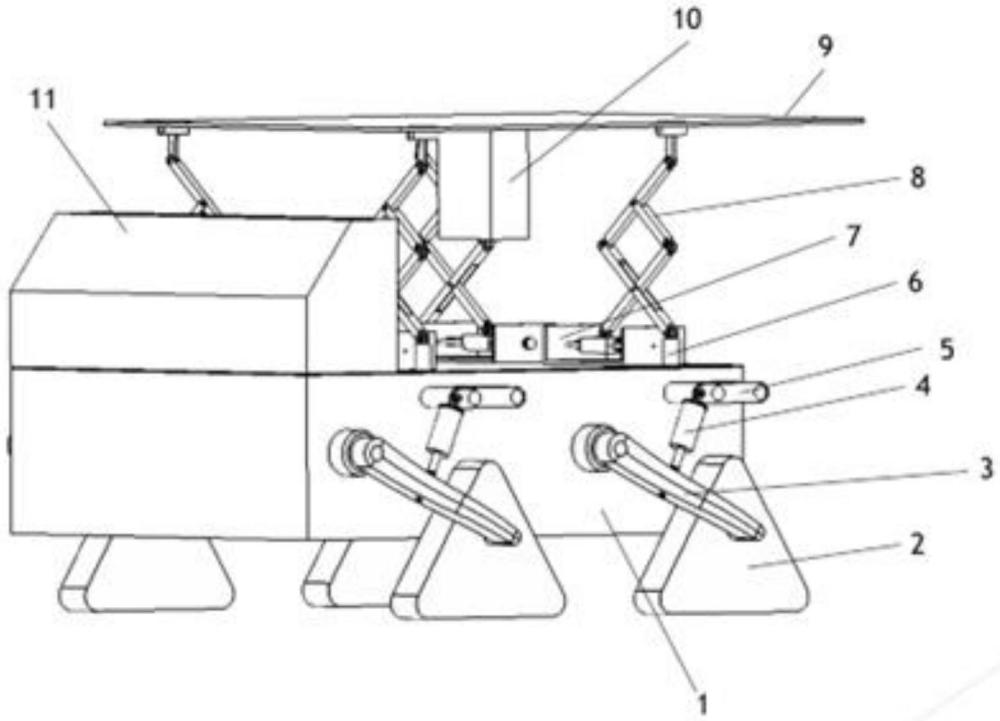
2、为实现上述目的,本实用新型采取的技术方案为:一种可自动调平的农机作业平台,包括:车体1、移动机构2、悬挂装置、作业平台调平装置、姿态检测装置10、驾驶室11;驾驶室11固定安装在车体1行驶方向的前端;
3、悬挂装置包括纵臂3、减震器4、减震器横架5;移动机构2和悬挂装置均有四组,安装在车体1的行进方向两侧,以每侧两个移动机构2分别各对称设置在车体1外侧,并通过纵臂3与车体1相连接,减震器4由减震器横架5和纵臂3连接在悬挂装置中,减震器横架5固定在车体1两侧;
4、作业平台调平装置固定在车体1上方,包括支撑底座6、行星滚珠丝杠7、支撑杆组8、作业平台9;作业平台9的四个方位分别设置一套支撑杆组8,用于控制作业平台9的调平,每组支撑杆组8均与行星滚珠丝杠7和支撑底座6连接;姿态检测装置10固定在作业平台9下方。
5、作为本实用新型的优选实施方案,所述移动机构2为四履带移动机构、双履带移动机构或四轮式移动机构,但不限于上述移动机构2,能够与悬挂装置连接实现带动车体1移动即可。移动机构均采用独立悬挂安装在车体1上。移动机构的驱动电机安装在移动机构之中或者安装在车体1中通过传动机构驱动移动机构前进。
6、作为本实用新型的优选实施方案,所述支撑底座6和行星滚珠丝杠7均固定在车体1上方。
7、作为本实用新型的优选实施方案,所述行星滚珠丝杠7包括平台701、底座702、驱动电机703、导向杆704和丝杠705;平台701通过两个导向杆704与丝杠705相连接,两个导向杆704与底座702两侧固定连接,丝杠705通过底座702两侧的孔洞与驱动电机703相连接。
8、作为本实用新型的优选实施方案,所述平台701内设置有行星滚珠丝杠内轴706、轴承707和套盘708;丝杠705穿过行星滚珠丝杠内轴706,与行星滚珠丝杠内轴706配合,平台701通过行星滚珠丝杠内轴706与丝杠705进行运动,行星滚珠丝杠内轴706的两端套有相互配合的轴承707和套盘708。
9、更优选的,所述行星滚珠丝杠内轴706共有14根,其上设置有螺纹线和齿轮,螺纹线与丝杠705啮合,14根行星滚珠丝杠内轴通过齿轮相互啮合运动,行星滚珠丝杠内轴706的两端套有相互配合的轴承707和套盘708,可以使得整个行星滚珠丝杠7在运动过程中保持足够顺滑。
10、丝杠705表面设置有螺纹与平台701中的行星滚珠丝杠内轴706通过螺纹铰接。导向杆704为光滑的钢柱,其贯穿平台701上设置的孔,并且与平台701通过孔固定连接,保证平台701不会乱动。设置在丝杠705两侧分别设置一根导向杆704形成对称结构能够保证平台701的稳定性。
11、14根行星滚珠丝杠内轴围绕丝杠705,与丝杠705螺纹连接,在丝杠705周围形成一个圆。平台701内壁设置有螺纹,借助内壁的螺纹与行星滚珠丝杠内轴706与丝杠705配合,实现整个机构的运动。
12、作为本实用新型的优选实施方案,支撑杆组8由多个支撑杆组成,分别为支撑杆ⅰ801、支撑杆ⅱ802、支撑杆ⅲ803、支撑杆ⅳ804、支撑杆ⅴ805;支撑杆ⅱ802的一端固定在行星滚珠丝杠平台701上,另一端与支撑杆ⅲ803一端相连;支撑杆ⅰ801一端固定在支撑底座6上,另一端与支撑杆ⅳ804一端相连;支撑杆ⅱ802与支撑杆ⅰ801交叉连接,支撑杆ⅲ803另一端固定在支撑杆ⅳ804的中间部分;支撑杆ⅳ804另一端与支撑杆ⅴ805相连;支撑杆ⅴ805另一端与作业平台9相连。
13、多个支撑杆通过销连接,保证连杆能转动。
14、更优选的,所述支撑杆ⅱ802和支撑杆ⅳ804为长实心杆,支撑杆ⅰ801为长空心杆,支撑杆ⅲ803为短实心杆,支撑杆ⅴ805为短实心杆。长空心杆和短实心杆的长度是相对的。
15、作为本实用新型的优选实施方案,姿态检测装置10包括装置外壳1002、阻尼转轴1001、负重指针1003、滑槽1004、阻挡块1005、负重块1006、指针尖1007、指针弹簧1008;装置外壳1002与作业平台9固定连接,负重指针1003通过阻尼转轴1001与装置外壳1002的上方内壁固定连接,负重块1006采用焊接或可拆卸的方式连接在负重指针1003下方位置;装置外壳1002的内壁里设置滑槽1004,滑槽1004以负重指针1003长度为半径,负重指针1003与装置外壳1002连接处为圆心;滑槽1004内设置有阻挡块1005,阻挡块1005对称设置在滑槽1004中线两侧,两个阻挡块1005的距离为负重指针1003从一个阻挡块1005转动4°到另一个阻挡块1005的距离;指针尖1007与负重指针1003中间设置有指针弹簧1008,用来保证指针尖1007与滑槽1004始终接触。
16、更优选的,所述装置外壳1002为长方体或正方体。控制电路安装在姿态检测装置的10的装置外壳1002中。
17、作为本实用新型的优选实施方案,所述负重块1006的质量要满足整个调平过程中负重指针1003越过阻挡块1005。
18、作为本实用新型的优选实施方案,本实用新型所述可自动调平的农机作业平台还包括行星滚珠丝杠控制电路,所述行星滚珠丝杠控制电路包括两个继电器20、控制开关21和供电装置22;两个继电器20的电磁线圈、供电端并联连接,供电装置22与其中一个继电器20的供电端串联连接,两个继电器20的输出端与驱动电机703连接,控制开关21分别与两个继电器20的电磁线圈端连接,再分别与姿态检测装置10的滑槽1004和负重指针1003连接,形成一个完整回路。
19、滑槽1004和负重指针1003、指针尖1007均为金属材质,均可导电。
20、更优选的,所述控制开关21为单刀双掷开关,利用两个继电器20来实现行星滚珠丝杠驱动电机703的正转和反转。
21、所述负重指针1003在两个阻挡块1005中间无法与行星滚珠丝杠控制电路相连,负重指针1003在两个阻挡块1005的靠外两侧可以控制控制开关21与行星滚珠丝杠控制电路相连。所述行星滚珠丝杠控制电路连接至行星滚珠丝杠7的控制驱动电机703,当作业平台9处于水平状态时,控制电路为断开,驱动电机703不转动。
22、一种可自动调平的农机作业平台的调平方法,包括:
23、(1)指针1003与滑槽1004分别通过导线与行星滚珠丝杠控制电路连接,当作业平台9往一侧倾斜时,负重指针1003由于重力的作用处于阻挡块1005的外侧,带动控制开关21使得控制电路连通,控制电路控制驱动电机703转动。
24、(2)驱动电机703转动,带动行星滚珠丝杠平台701移动,控制支撑杆组8对作业平台9进行调平。当车身倾斜时,控制整体高度较低的一侧驱动电机703转动抬高作业平台9一侧的同时控制另一侧的驱动电机703转动降低对应一侧的作业平台9,两侧驱动电机703同时转动,一侧升高一侧降低,协同调平作业平台9。
25、(3)当作业平台9逐渐恢复到水平状态的时候,负重指针1003也因为重力的作用逐渐回到阻挡块1005中间,当回到阻挡块1005中间后,负重指针1003带动控制开关21与控制电路断开,驱动电机703停止转动,作业平台9保持水平状态。
26、与现有技术相比,本实用新型的有益效果为:本实用新型公开了一种可自动调平的农机作业平台,包括车体、移动机构、悬挂装置、作业平台调平装置、姿态检测装置和行星滚珠丝杠控制电路。所述车体、移动机构和悬挂装置为主体;作业平台调平装置安装于车体上;姿态检测装置安装在作业平台调平装置上,用于检测作业平台倾斜姿态;当作业平台发生倾斜时,姿态检测装置可以激活行星滚珠丝杠控制电路控制调平农机作业平台,实现农机作业平台的自动调平。本实用新型提供的农机作业平台,可以满足作业平台上的作业工具在非水平的地方实现水平作业的特殊要求;并且其结构设计具有良好的稳定性,经过障碍物时也能做到作业平台的稳定,能满足丘陵山区地带的特殊的农业作业需要。
本文地址:https://www.jishuxx.com/zhuanli/20240711/110789.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表