铁水运输动力车和铁水运输动力车编组的制作方法
- 国知局
- 2024-08-01 08:30:54
本公开涉及冶金运输设备,尤其涉及一种铁水运输动力车和铁水运输动力车编组。
背景技术:
1、炉前铁水运输作业是冶金企业核心生产工艺线,目前多采用内燃机车牵引混铁车(多为鱼雷型混铁车或敞口式混铁车)的方式。其生产作业现场普遍存在运输装备老旧、油耗高、排放指标差、人工作业效率低、劳动强度大等方面的问题。
2、现有技术提出了一种全智能无人操控蓄电式牵引机车运转系统(cn113665377a),包括蓄电式的牵引机车、轨道,还包括无人驾驶机构和远程监控机构;轨道为智能轨道,包括行驶区和等待区;行驶区轨道上有光伏发电板;等待区的轨道上铺设无线充电线圈;无人驾驶机构包括机车控制模块,以及设置在机车头内部并与机车控制模块连接的gps模块、故障诊断模块、蓝牙遥控模块和到位识别模块;无人驾驶机构中的gps模块和故障诊断模块均与所述控制中心连接受控,电池管理系统与控制中心连接受控。该发明在钢厂从高炉向转炉转运铁水的过程中,在轨道上分别铺设光伏发电板和动态无线充电板,光伏发电板用于太阳能发电,充分利用清洁能源。但存在以下缺点:
3、1)投资成本高:光伏系统及其配套设施占地面积大、投资成本高,短期内难以收回成本,不适用于大部分企业用户,难以实现技术落地及推广应用;
4、2)运维成本高:该方案系统硬件及软件维护所需人力、物力资源成本较高;
5、3)可靠性较低:光伏充电系统方案只能在白天工作,且受气候影响较大,长期的雨、雪、雾等天气情况将大幅影响光伏系统的可靠性,且不适用于冶金企业高温、高粉尘的作业环境;
6、4)充电效率低:该方案需在轨道上铺设光伏发电板和动态无线充电板,由于材质及技术的限制,目前这两种充电方案的充电效率较低,无法满足大功率、快速充电的要求;特别是在铁水运输作业现场7x24频繁作业的场景下,难以满足运用需求;
7、5)定位精度低:该方案采用gps模块实现机车定位,其定位精度通常为≥±10cm,若在厂房等封闭区间内则精度更低,且不具有其他冗余定位系统设计,无法满足出铁口与混铁车罐口的高精度对位要求,容易发生事故。
8、因此,现有技术有待改进。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种铁水运输动力车,通过供电系统、地面管控系统和无人驾驶系统,解决了现有技术铁水运输作业效率低、劳动强度大、人为安全风险高、能耗大等问题。
2、为解决上述技术问题,本发明采用以下技术方案:
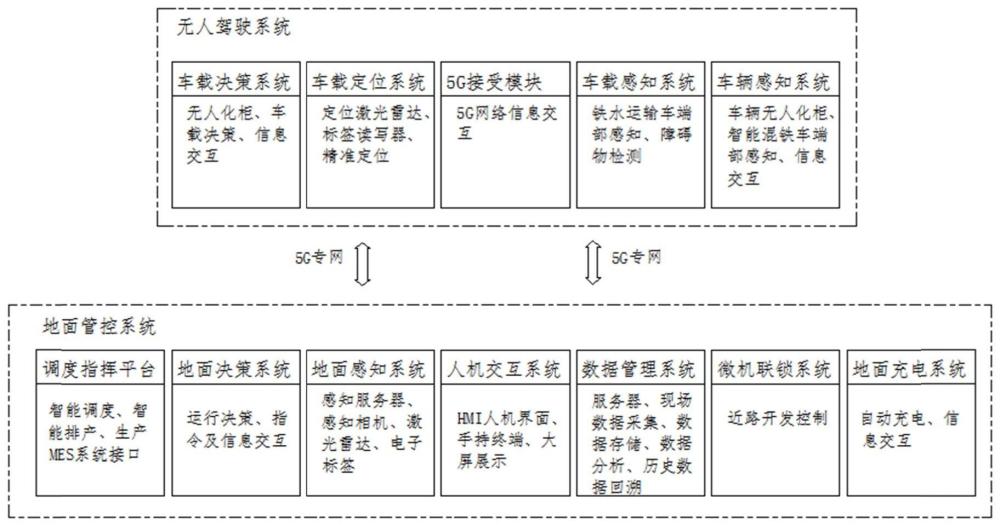
3、根据本发明的方面,提供了一种铁水运输动力车,包括:智慧铁水运输系统,智慧铁水运输系统包括:超级电容,超级电容用于为铁水运输动力车的牵引逆变器供电;地面管控系统,地面管控系统包括地面决策系统和地面充电系统,地面充电系统用于为超级电容进行大功率快速充电;无人驾驶系统,无人驾驶系统包括车载决策系统、车载定位系统和车载感知系统,车载决策系统基于车载定位系统对铁水运输动力车的定位信息、以及车载感知系统采集的铁水运输动力车前方的障碍物类型、轮廓、距离等信息并接受地面决策系统的运行决策向铁水运输动力车发出相应运行指令;其中,车载定位系统包括定位激光雷达和标签读写器,车载定位系统基于定位激光雷达反馈的位置信息,并结合标签读写器感应到的地面电子标签位置信息以对铁水运水动力车进行融合定位以及进行精准停车。
4、在本发明的一个实施例中,智慧铁水运输系统还包括人工驾驶系统,人工驾驶系统包括操作箱,以用于在人工驾驶模式下实现铁水运输动力车的牵引、制动、方向设定、紧急停车以及人工驾驶和自动驾驶切换。
5、在本发明的一个实施例中,智慧铁水运输系统还包括智能状态显示器,以实现铁水运输动力车的运行速度、运行方向、驾驶模式、安全警示等状态显示功能。
6、在本发明的一个实施例中,智慧铁水运输系统还包括脱轨检测系统,脱轨检测系统依据铁水运输动力车的轮轨状态信息进行脱轨判断,并在铁水运输动力车发生脱轨时发出报警。
7、在本发明的一个实施例中,智慧铁水运输系统还包括5g专网,地面管控系统与无人驾驶系统通过5g专网进行信号传输。
8、在本发明的一个实施例中,地面管控系统还包括地面感知系统以用于配合车载感知系统采集铁水运输动力车前方的障碍物类型、轮廓、距离等信息。
9、在本发明的一个实施例中,地面管控系统还包括调度指挥平台、人机交换系统、数据管理系统和微机联锁系统。
10、另一方面,本发明还给出了一种铁水运输动力车编组,包括:智能混铁车,以及上述的铁水运输动力车,智能混铁车上设置有铁水罐、变频控制柜、车辆无人化柜和感知模块,铁水运输动力车为智能混铁车提供牵引动力及制动力。
11、在本发明的一个实施例中,智慧铁水运输系统还包括自动倾翻系统,自动倾翻系统用于实现铁水罐的自动倾翻。
12、在本发明的一个实施例中,无人驾驶系统还包括车辆感知系统,车辆感知系统设置在智能混铁车上以用于辅助车载感知系统采集的铁水运输动力车前方的障碍物类型、轮廓、距离等信息。
13、通过采用上述技术方案,本发明相比现有技术具有如下优点:实现了铁水运输作业全过程无人值守,并进一步保证了安全生产;具有智能感知、智能调度、无人驾驶、自动充电等功能,实现集中调度和数字化控制;实现作业现场零排放、零油耗;作业现场无需司机、调度员等,大幅缩减人力成本,实现减员增效。
技术特征:1.一种铁水运输动力车,其特征在于,包括:智慧铁水运输系统,所述智慧铁水运输系统包括:
2.根据权利要求1所述的铁水运输动力车,其特征在于,所述智慧铁水运输系统还包括人工驾驶系统,所述人工驾驶系统包括操作箱,以用于在人工驾驶模式下实现铁水运输动力车的牵引、制动、方向设定、紧急停车以及人工驾驶和自动驾驶切换。
3.根据权利要求1所述的铁水运输动力车,其特征在于,所述智慧铁水运输系统还包括智能状态显示器,以实现铁水运输动力车的运行速度、运行方向、驾驶模式、安全警示等状态显示功能。
4.根据权利要求1所述的铁水运输动力车,其特征在于,所述智慧铁水运输系统还包括脱轨检测系统,所述脱轨检测系统依据铁水运输动力车的轮轨状态信息进行脱轨判断,并在铁水运输动力车发生脱轨时发出报警。
5.根据权利要求1所述的铁水运输动力车,其特征在于,所述智慧铁水运输系统还包括5g专网,所述地面管控系统与所述无人驾驶系统通过所述5g专网进行信号传输。
6.根据权利要求1所述的铁水运输动力车,其特征在于,所述地面管控系统还包括地面感知系统以用于配合所述车载感知系统采集铁水运输动力车前方的障碍物类型、轮廓、距离等信息。
7.根据权利要求1所述的铁水运输动力车,其特征在于,所述地面管控系统还包括调度指挥平台、人机交换系统、数据管理系统和微机联锁系统。
8.一种铁水运输动力车编组,其特征在于,包括:智能混铁车,以及权利要求1-7任意一项所述的铁水运输动力车,所述智能混铁车上设置有铁水罐、变频控制柜、车辆无人化柜和感知模块,所述铁水运输动力车为所述智能混铁车提供牵引动力及制动力。
9.根据权利要求8所述的铁水运输动力车编组,其特征在于,所述智慧铁水运输系统还包括自动倾翻系统,所述自动倾翻系统用于实现所述铁水罐的自动倾翻。
10.根据权利要求8所述的铁水运输动力车编组,其特征在于,所述无人驾驶系统还包括车辆感知系统,所述车辆感知系统设置在所述智能混铁车上以用于辅助所述车载感知系统采集的铁水运输动力车前方的障碍物类型、轮廓、距离等信息。
技术总结本公开提供了一种铁水运输动力车和铁水运输动力车编组,铁水运输动力车包括:智慧铁水运输系统,智慧铁水运输系统包括:超级电容,用于为铁水运输动力车的牵引逆变器供电;地面管控系统包括地面决策系统和地面充电系统,地面充电系统用于为超级电容进行大功率快速充电;无人驾驶系统包括车载决策系统、车载定位系统和车载感知系统,车载决策系统基于车载定位系统对铁水运输动力车的定位信息和车载感知系统采集的铁水运输动力车前方的障碍物类型、轮廓、距离等信息并接受地面决策系统的运行决策向铁水运输动力车发出相应运行指令。本公开具有智能感知、智能调度、无人驾驶、自动充电等功能,实现集中调度和数字化控制;实现作业现场零排放零油耗。技术研发人员:王秀岩,蔡志伟,冀文轩,高磊,贾峰,宋杨,任子豪,王运宽受保护的技术使用者:中车大连机车车辆有限公司技术研发日:技术公布日:2024/1/22本文地址:https://www.jishuxx.com/zhuanli/20240718/232057.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。