一种列车车载控制系统故障下的自动救援方法
- 国知局
- 2024-08-01 08:37:00
本发明涉及交通运输,特别是一种列车车载控制系统故障下的自动救援方法。
背景技术:
1、列车的车载控制系统发生故障时,往往会失去自主行驶能力,此时需要救援车通过连挂救援,人工连挂救援方式为司机凭经验驾驶救援车逼近故障车,通过救援车和故障车的撞击实现列车硬连挂。上述操作对司机的操作能力要求较高,救援中司机的业务能力也会影响救援效率及安全性;同时,硬连挂是通过车钩连接,当救援车因技术、人为或自然原因等因素意外出轨,被救援车也会随之出轨造成严重事故,这是一种非常危险的事件。因此,如何提升救援效率,缩短救援时间,避免站间闭塞区间的长时间堵塞,从而提高整条线路的运行效率,以及提高救援可靠性和安全性成为亟待解决的问题。
技术实现思路
1、针对背景技术的问题,本发明提供一种列车车载控制系统故障下的自动救援方法,以解决如何提高救援效率以及提高救援可靠性、安全性的问题。
2、为实现本发明的目的,本发明提供了一种列车车载控制系统故障下的自动救援方法,其创新点在于:包括运行列车、救援列车和地面列控中心;所述运行列车的车头和车尾以及救援列车上均设置有车载控制系统,所述车载控制系统包括车载监测模块、自动驾驶模块、安全保护模块、追踪模块、定位模块和通信模块;
3、所述车载监测模块能监测自动驾驶模块是否故障,并能在自动驾驶模块出现故障时生成故障信息并通过通信模块发送给地面列控中心;
4、所述安全保护模块用于所述自动驾驶模块出现故障后,控制车辆紧急制动;
5、所述自动驾驶模块包括曲线生成模块,所述曲线生成模块能生成自动驾驶速度曲线,自动驾驶模块能根据曲线生成模块生成的自动驾驶速度曲线控制车辆运行;
6、所述追踪模块能控制运行列车与救援列车在虚拟连挂模式下按设定的间距追踪救援列车运行;
7、所述自动救援方法包括:
8、设运行列车行驶于a站和b站两个相邻站之间,所述a站为出发站,所述b站为终到站,所述a站和b站均设置有救援列车,运行列车通过车头的车载控制系统控制运行列车自动行驶;当运行列车车头的车载控制系统的自动驾驶模块出现故障无法正常工作时:
9、一)运行列车车头的车载监测模块生成车头控制故障信息并通过通信模块发送给地面列控中心;然后地面列控中心生成紧急停车指令并通过运行列车的通信模块发送给车头的车载控制系统;然后车头的车载控制系统通过安全保护模块控制运行列车紧急停车直到完全停稳;然后运行列车车头的定位模块将当前的定位信息通过通信模块发送给地面控制中心;
10、二)运行列车车尾的车载监测模块对车尾的自动驾驶模块是否故障进行判断:如果车尾的自动驾驶模块未发生故障能正常工作,则进入步骤三);如果车尾自动驾驶模块故障无法正常工作,则进入步骤四);
11、三)运行列车车尾的车载监测模块生成车尾控制正常信息并通过通信模块发送给地面列控中心,然后地面列控中心生成从车尾到a站之间的第一闭塞区间信息,然后地面列控中心生成返回指令,然后地面列控中心通过运行列车的通信模块向车尾的车载控制系统发送返回指令和第一闭塞区间信息,然后车尾的自动驾驶模块通过曲线生成模块采用方法一生成第一自动驾驶速度曲线,然后车尾的自动驾驶模块根据第一自动驾驶速度曲线控制列车返回a站;程序结束;
12、四)地面列控中心根据收到的运行列车的定位信息分别计算运行列车与a站和b站两个站的距离,将距离运行列车距离更小的站记为返回站,将设置在返回站的救援列车记为施救车;然后地面列控中心生成从返回站到施救点的第二闭塞区间信息,同时地面列控中心生成从施救点到返回站的第三闭塞区间信息,然后地面列控中心生成救援指令,然后地面列控中心通过施救车的通信模块将救援指令、第二闭塞区间信息和第三闭塞区间信息发送给施救车的自动驾驶模块;然后施救车的曲线生成模块根据第二闭塞区间信息采用方法一生成第二自动驾驶速度曲线,同时施救车的曲线生成模块根据第三闭塞区间信息采用方法一生成第三自动驾驶速度曲线;
13、所述施救点为施救车与运行列车的虚拟连挂位置点,所述施救点到运行列车的距离为设定值;
14、五)然后施救车的自动驾驶模块根据第二自动驾驶速度曲线控制施救车行驶到施救点,然后施救车与运行列车实施虚拟连挂控制,然后施救车的自动驾驶模块根据第三自动驾驶速度曲线控制施救车驶回返回站,所述运行列车的车头或车尾的追踪模块按虚拟连挂的运行模式控制运行列车追踪施救车行驶到返回站;
15、所述方法一包括:
16、设置4个智能体,4个智能体分别按dqn(deep q-network深度q网络)、sac(softactor-critic最大熵强化学习算法)、ppo(proximal policy optimization近端策略优化算法)和ddpg(deep deterministic policy gradient深度确定性策略梯度算法)四种策略根据收到的闭塞区间信息进行强化学习,将奖励值最大的智能体生成的自动驾驶速度曲线作为输出结果;其中,强化学习中涉及的奖励函数ri根据公式一确定;
17、所述公式一为:
18、
19、其中,设车辆即将运行的路段由n个步进长度相等的步进区段组成,所述ri为车辆在第i个步进区段运行状态的奖励函数,所述i为1至n的整数;所述为准时性奖励函数,根据公式二确定;所述为乘坐舒适度奖励函数,根据公式三确定;所述w1和w2分别为和的权重系数,w1和w2为设定值,且w1+w2=1;
20、所述公式二为:
21、
22、其中,所述为车辆在第i个步进区段的实际运行时长;
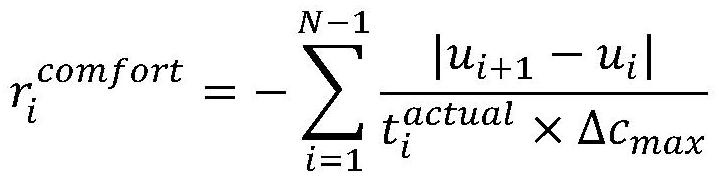
23、所述公式三为:
24、
25、其中,所述ui和ui+1分别为车辆在第i个步进区段和第i+1个步进区段的加速度;所述δcmax为列车的最大运行冲击率。
26、进一步地,所述方法一中强化学习所需的闭塞区间信息包括包括线路静态数据、列车静态数据和列车运行动态数据;所述线路静态数据包括线路坡度值和区间限速值;所述列车静态数据包括列车牵引和制动参数;列车运行动态数据包括列车当前的位置、速度、加速度和运行时刻。
27、本发明的原理如下:
28、首先,本发明通过在运行列车的车头和车尾均配置车载控制系统,两套控制系统形成备份关系,当车头的控制系统故障时,启用车尾的控制系统控制运行列车返回出发站,以最大限度提高运行列车其中一个控制系统故障后的处置效率。但是对于两套控制系统均故障的情况则控制救援车按后续方式进行救援(本发明的方法也适用于只配置一套车载控制系统且发生故障的运行列车):在出发站和终到站均配置救援车,根据运行列车的故障停驶位置,控制离运行列车最近的救援车参与救援,救援车通过与运行列车进行虚拟连挂的运行控制方式带领运行列车快速驶离闭塞区间到达最近站点进行处理。
29、而本发明的另一亮点在于:不管是运行列车的备用车载控制系统还是救援车的车载控制系统,在生成列车的自动驾驶速度曲线时,都采用了方法一即族群式的强化学习方法,该方法将多个智能体集合成一个联盟,但各个智能体采用不同的强化学习策略,可以保证探索过程多样性,这种训练方式相比于单个智能体对策略空间有更充分的探索,可获得更为优秀的节时驾驶速度曲线。另一方面,对于每个智能体来说,设计了准时性和舒适度两个奖励函数,并通过可调的权重系数将二者融合得到综合的奖励函数,通过上述奖励函数的设计,使智能体通过训练输出自动驾驶速度曲线,便能够满足列车的运行时间和乘客的乘坐舒适度达到最优的组合。
30、由此可见,本发明具有如下的有益效果:本发明所述的救援方法灵活、自动化、智能化,能最大限度的提高列车的救援效率;同时通过族群式的强化学习方法生成的自动驾驶速度曲线优化了列车自动驾驶时间,进一步提高了救援效率,并还保障了乘坐舒适性;此外,采用虚拟连挂的救援方式,避免了因救援车事故对有乘客的运行列车的影响,大大提高了救援的可靠性、安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232571.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表