一种电力机车牵引力多轴协同分配的控制方法和系统与流程
- 国知局
- 2024-08-01 08:40:14
本技术涉及轨道交通列车,特别涉及一种电力机车牵引力多轴协同分配的控制方法和系统。
背景技术:
1、大功率交流传动电力机车具有载运量大、速度高、维修量少和节能环保等一系列优点,已成为我国各大铁路干线上客货运输的主力担当,在国民经济的发展中起到了不可替代的作用。然而,对于复杂地形和复杂气候区域,特别是艰险山区的铁路干线不可避免设置许多小半径曲线、长大坡道以及曲线和坡道的叠加线路等,且一些线路上,钢轨表面不可避免存在油污、雨水、树叶、泥土等各种污染物,这些污染物会显著降低轮轨之间的粘着系数,导致车轮频繁发生打滑或空转的问题。特别是存在同一机车不同轮对粘着系数差异大而导致个别轮对容易打滑或空转的问题。
2、现有的技术中,通常通过计算机车各个轴的轴重转移量,并依据各个轴的法向载荷,对其扭矩进行适当的电气补偿。比如某一轮对作为导向轮对时,牵引工况下该轮对的法向载荷最少,则适当降低该轮对的给定扭矩;而在电制动时该轮对的法向载荷最大,则适当增加该轮对的给定扭矩。但该技术方案未考虑轨面状态对轮轨粘着的影响,具有较大的局限性,无法有效地减少机车特定轮对的打滑或空转频次。
技术实现思路
1、本技术的目的在于提供一种电力机车牵引力多轴协同分配的控制方法和系统,其能够改善上述问题。
2、本技术的实施例是这样实现的:
3、第一方面,本技术提供一种电力机车牵引力多轴协同分配的控制方法,用于合理分配目标电力机车中各个轮对的牵引力,该牵引力控制方法包括:
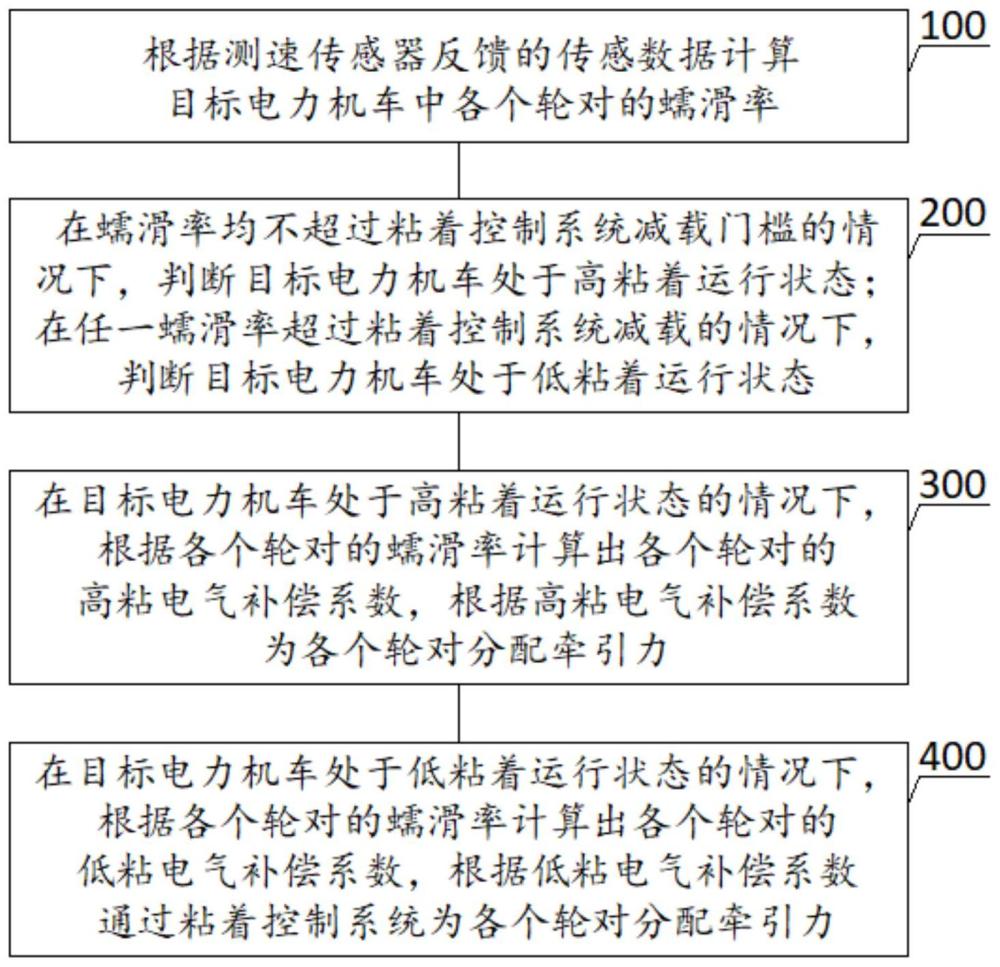
4、根据测速雷达、传感器反馈的传感数据计算所述目标电力机车中各个轮对的蠕滑率;
5、在所述蠕滑率均不触发粘着控制系统减载的情况下,判断所述目标电力机车处于高粘着运行状态;在任一所述蠕滑率触发粘着控制系统减载的情况下,判断所述目标电力机车处于低粘着运行状态;
6、在所述目标电力机车处于高粘着运行状态的情况下,根据各个轮对的所述蠕滑率计算出各个轮对的高粘电气补偿系数,根据所述高粘电气补偿系数为各个轮对分配牵引力;
7、在所述目标电力机车处于低粘着运行状态的情况下,触发粘着控制系统减载的轮对,其牵引力由粘着控制系统提供,计算未触发粘着控制系统减载的轮对的所述蠕滑率,由此计算出对应的低粘电气补偿系数,根据所述低粘电气补偿系数通过为对应的轮对分配牵引力。
8、可以理解,本技术公开了一种电力机车牵引力多轴协同分配的控制方法,用于合理分配目标电力机车中各个轮对的牵引力。该方法实时计算目标电力机车中各个轮对的蠕滑率,基于该蠕滑率实时判断目标电力机车处于高粘或低粘运行状态,且动态调整目标电力机车的各个轮对的电气补偿系数,从而合理地分配各个轮对的牵引力。由于蠕滑率是机车的轴重转移、轨面粘着、线路激励等综合影响后的结果,因此本技术所公开的牵引力控制方法基于该蠕滑率进行牵引力分配,摒弃了以往仅通过轴重转移量计算电气补偿的牵引力分配方案,更加有效地减少了同一机车中特定轮对的打滑或空转频次。
9、在本技术可选的实施例中,根据各个轮对的所述蠕滑率计算出各个轮对的高粘电气补偿系数,根据所述高粘电气补偿系数为各个轮对分配牵引力,包括:
10、将目标电力机车内所有轮对的所述蠕滑率ηi的平均值作为第一参考蠕滑率ηref1;
11、根据下式计算出所述目标电力机车内各个轮对的第一高粘电气补偿系数ai1:
12、其中,ai1代表第i组轮对的所述第一高粘电气补偿系数;
13、根据下式为所述目标电力机车内各个轮对分配牵引力:
14、
15、其中,fsum为所述目标电力机车总牵引力;f'i1为第i组轮对分配的牵引力,n为目标电力机车内轮对的组数。
16、可以理解,对于处于高粘运行状态的目标电力机车,其中各个轮对的牵引力即为按照第一高粘电气补偿系数ai1所分配的牵引力。蠕滑率越大,则电气补偿系数越小,分配的牵引力也越小,而蠕滑率越小,相应的电气补偿系数越大,则分配的牵引力也越大,可见,基于蠕滑率的电气补偿系数的计算完全将轨面粘着、轴重转移、轨面粗糙度以及轮轨廓形等其它因素考虑在内,实现了真正意义上的多轴协同控制,相比仅通过轴重转移计算电气补偿的局限性,本发明的优越性非常明显。
17、在本技术可选的实施例中,所述根据各个轮对的所述蠕滑率计算出各个轮对的低粘电气补偿系数,根据所述低粘电气补偿系数通过粘着控制系统为各个轮对分配牵引力,包括:
18、将触发粘着控制系统减载的轮对作为低粘目标轮对;
19、根据所述蠕滑率为所述目标机车内除所述低粘目标轮对以外的其他轮对计算低粘电气补偿系数a'i;
20、根据所述低粘电气补偿系数a'i为除所述低粘目标轮对以外的其他轮对分配牵引力f″i;
21、将除所述低粘目标轮对以外的其他轮对中牵引力最低值分配给所述低粘目标轮对。
22、可以理解,对于处于低粘运行状态的目标电力机车,低粘目标轮对的纵向蠕滑率过大,需要机车的粘着控制系统降低该轴的牵引力,此时,打滑或空转轮对的实际牵引力由粘着控制系统输出。比如,机车牵引运行时,导向轮对最先接触到低粘着轨面,其空转的发生概率最大,当导向轮对发生空转时,此时机车的粘着控制系统介入,导向轮对的实际牵引力由粘着控制系统调节,采用本发明提出的多轴协同控制后,导向轮对发生空转后,其被分配的给定牵引力最小,有利于粘着控制系统更早恢复该轮对的牵引力,减小其空转时长。
23、第二方面,本技术公开了一种电力机车牵引力多轴协同分配的控制系统,用于合理分配目标电力机车中各个轮对的牵引力,该牵引力控制系统包括:测速传感器、粘着控制系统和牵引力分配装置。
24、所述牵引力分配装置包括处理器、输入设备、输出设备和存储器,所述处理器、输入设备、输出设备和存储器相互连接,其中,所述存储器用于存储计算机程序,所述计算机程序包括程序指令,所述处理器被配置用于调用所述程序指令,执行如第一方面任一项所述的方法。
25、其中,测速传感器可以是转速传感器或多个测速雷达。
26、有益效果:
27、本技术公开了一种电力机车牵引力多轴协同分配的控制方法和系统,用于合理分配多轴协同运行的目标电力机车中各个轮对的牵引力。该方法实时计算目标电力机车中各个轮对的蠕滑率,基于该蠕滑率实时判断目标电力机车处于高粘或低粘运行状态,且动态调整目标电力机车的各个轮对的电气补偿系数,从而合理地分配各个轮对的牵引力。由于蠕滑率是机车的轴重转移、轨面粘着、线路激励等综合影响后的结果,因此本技术所公开的牵引力控制方法基于该蠕滑率进行牵引力分配,摒弃了以往仅通过轴重转移量计算电气补偿的牵引力分配方案,更加有效地减少了同一机车中特定轮对的打滑或空转频次。
28、对于处于高粘运行状态的目标电力机车,其中各个轮对的牵引力即为按照第一高粘电气补偿系数ai1所分配的牵引力。蠕滑率越大,则电气补偿系数越小,分配的牵引力也越小,而蠕滑率越小,相应的电气补偿系数越大,则分配的牵引力也越大,可见,基于蠕滑率的电气补偿系数的计算完全将轨面粘着、轴重转移、轨面粗糙度以及轮轨廓形等其它因素考虑在内,实现了真正意义上的多轴协同控制,相比仅通过轴重转移计算电气补偿的局限性,本发明的优越性非常明显。
29、对于处于低粘运行状态的目标电力机车,低粘目标轮对的纵向蠕滑率过大,需要机车的粘着控制系统动态调节其牵引力,此时,打滑或空转轮对的实际实际力由粘着控制系统输出,小于其给定力,计算未触发粘着控制系统减载轮对的电气补偿系数,然后分配牵引力,并将最低牵引力作为打滑/空转轮对的给定牵引力。
30、为使本技术的上述目的、特征和优点能更明显易懂,下文特举可选实施例,并配合所附附图,作详细说明如下。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232759.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表