基于自主感知后备运行级别列车追踪的方法及装置与流程
- 国知局
- 2024-08-01 08:40:17
本文件涉及计算机,尤其涉及一种基于自主感知后备运行级别列车追踪的方法及装置。
背景技术:
1、列车在车-地无线通信故障降级后,通过感知可视距离和障碍物信息计算感知移动授权ma,以后备级别运行至进路终端信号机前;当列车行进时前方出现信号机,列车根据感知设备识别状态机的信号去自主行车,以此提高信号系统的可用性。
2、在轨道交通技术的快速发展的今天,基于自主感知后备模式可以在无人驾驶的情况下提高对城轨车辆运行的安全性、可靠性、舒适性和高效性,能够降低运营成本,为促进我国城市轨道车辆无人驾驶技术的发展提供重要的理论意义和实际应用价值。
3、在现有技术中,以后备级别运行时,列车智能根据状态机信号进行信号机状态的识别,但是,从状态机到信号机中间的一段进路,列车是不能感知到信号机的变化的,如果在此期间信号机发生了变化,那么列车追踪就会出现问题。
技术实现思路
1、本发明的目的在于提供一种基于自主感知后备运行级别列车追踪的方法及装置,旨在解决现有技术中的上述问题。
2、本发明提供一种基于自主感知后备运行级别列车追踪的方法,包括:
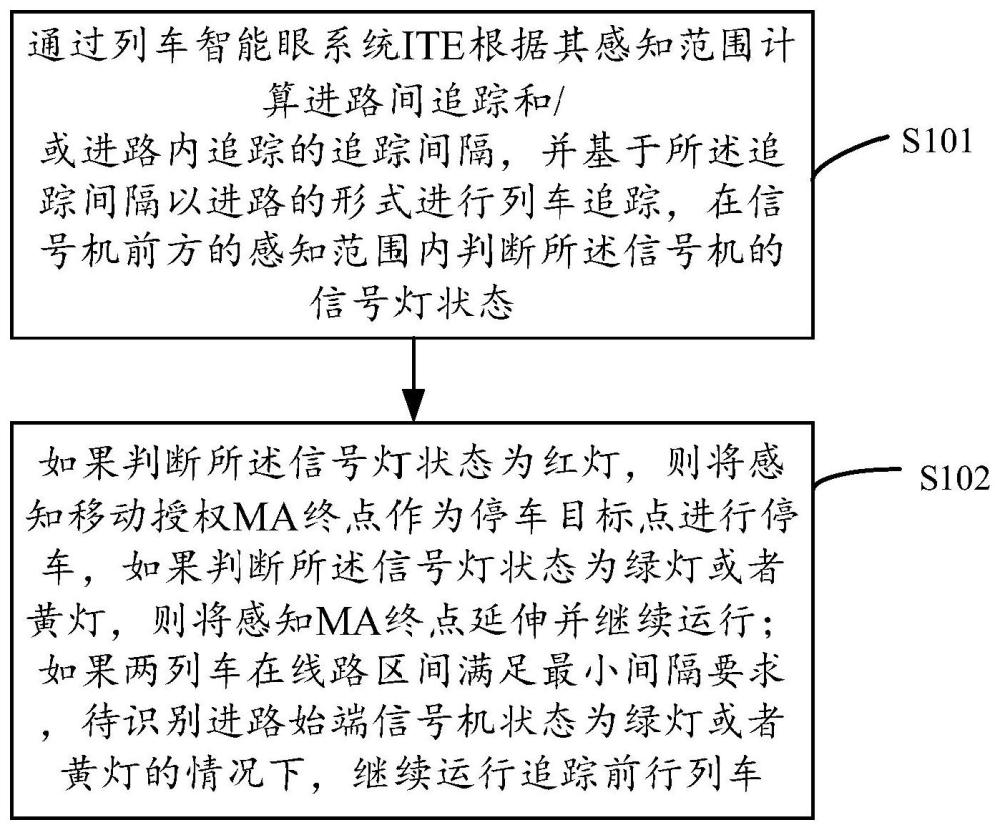
3、通过列车智能眼系统ite根据其感知范围计算进路间追踪和/或进路内追踪的追踪间隔,并基于所述追踪间隔以进路的形式进行列车追踪,在信号机前方的感知范围内判断所述信号机的信号灯状态;
4、如果判断所述信号灯状态为红灯,则将感知移动授权ma终点作为停车目标点进行停车,如果判断所述信号灯状态为绿灯或者黄灯,则将感知ma终点延伸并继续运行;如果两列车在线路区间满足最小间隔要求,待识别进路始端信号机状态为绿灯或者黄灯的情况下,继续运行追踪前行列车。
5、本发明提供一种基于自主感知后备运行级别列车追踪的装置,包括:
6、感知模块,用于通过列车智能眼系统ite根据其感知范围计算进路间追踪和/或进路内追踪的追踪间隔,并基于所述追踪间隔以进路的形式进行列车追踪,在信号机前方的感知范围内判断所述信号机的信号灯状态;
7、控制模块,用于如果判断所述信号灯状态为红灯,则将感知移动授权ma终点作为停车目标点进行停车,如果判断所述信号灯状态为绿灯或者黄灯,则将感知ma终点延伸并继续运行;如果两列车在线路区间满足最小间隔要求,待识别进路始端信号机状态为绿灯或者黄灯的情况下,继续运行追踪前行列车。
8、本发明实施例还提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述基于自主感知后备运行级别列车追踪的方法的步骤。
9、本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有信息传递的实现程序,所述程序被处理器执行时实现上述基于自主感知后备运行级别列车追踪的方法的步骤。
10、采用本发明实施例,列车在运营过程中,针对自主感知后备模式,通过列车智能眼系统ite在信号机前方的感知范围内判断所述信号机的信号灯状态,并根据信号灯状态确定停车或继续运行,实现在主用信号系统不可用的情况下,能够快速启用自主感知后备模式,达到提高运营效率的目的,由于能够近距离获取信号灯的状态,增加系统的可用性和灵活性,实现了灵活高效的列车追踪。
技术特征:1.一种基于自主感知后备运行级别列车追踪的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求1所述的方法,其特征在于,所述方法进一步包括:
4.根据权利要求1所述的方法,其特征在于,所述方法进一步包括:
5.根据权利要求1所述的方法,其特征在于,所述方法进一步包括:
6.根据权利要求5所述的方法,其特征在于,所述方法进一步包括:
7.根据权利要求5所述的方法,其特征在于,通过列车智能眼系统ite根据其感知范围计算进路间追踪和/或进路内追踪的追踪间隔具体包括:
8.一种基于自主感知后备运行级别列车追踪的装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至7中任一项所述的基于自主感知后备运行级别列车追踪的方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有信息传递的实现程序,所述程序被处理器执行时实现如权利要求1至7中任一项所述的基于自主感知后备运行级别列车追踪的方法的步骤。
技术总结本说明书实施例提供了一种基于自主感知后备运行级别列车追踪的方法及装置,其中,方法包括:通过列车智能眼系统ITE根据其感知范围计算进路间追踪和/或进路内追踪的追踪间隔,并基于所述追踪间隔以进路的形式进行列车追踪,在信号机前方的感知范围内判断所述信号机的信号灯状态;如果判断所述信号灯状态为红灯,则将感知移动授权MA终点作为停车目标点进行停车,如果判断所述信号灯状态为绿灯或者黄灯,则将感知MA终点延伸并继续运行;如果两列车在线路区间满足最小间隔要求,待识别进路始端信号机状态为绿灯或者黄灯的情况下,继续运行追踪前行列车。技术研发人员:李雪洁,王力明,迟盼盼受保护的技术使用者:交控科技股份有限公司技术研发日:技术公布日:2024/3/4本文地址:https://www.jishuxx.com/zhuanli/20240718/232762.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表