一种导轨式巡检机器人的复合定位系统的制作方法
- 国知局
- 2024-08-01 08:58:22
本技术涉及,具体涉及一种导轨式巡检机器人的复合定位系统。
背景技术:
1、目前隧道和管廊内部的轨道巡检机器人得到快速发展,替代人工巡视工作,减少人员安全,减轻作业人员工作负担。机器人巡检过程中,机器的定位精度至关重要,现有轨道巡检机器人的定位系统主要有超声、激光、红外测距等距离传感器定位、电磁传感定位、卫星定位(gps)等。这些定位方法都会受到诸如环境、气候、光照等因素的影响,使用范围受到限制。超声、激光、红外测距等距离传感器的定位方法受传感器精度影响较大;电磁传感器定位需要在机器人需定位的道路上铺设磁条,工程量巨大,而且磁条在湿热天气下退磁较快,有些环境还不允许铺设磁条;gps定位准确,但是不能出现遮挡情况,不适合室内环境中的定位。
2、rfid(radio frequency identification)射频识别是一种非接触式的自动识别技术,它通过射频信号自动识别目标对象并获取相关数据,识别工作无须人工干预,可工作于各种恶劣环境,rfid技术可识别高速运动物体并可同时识别多个标签,操作快捷方便。
技术实现思路
1、本实用新型的目的在于克服现有技术的不足,提供一种导轨式巡检机器人的复合定位系统,其基于rfid自动识别技术,可实现封闭环境内机器人精准定位。
2、本实用新型的技术方案如下:
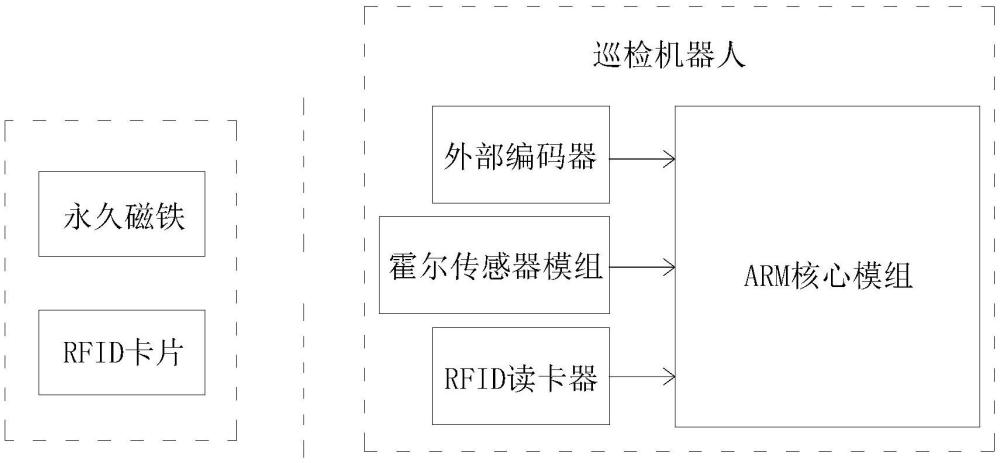
3、一种导轨式巡检机器人的复合定位系统,包括巡检机器人及设置在机器人行驶导轨上的永久磁铁和rfid卡片,所述巡检机器人设置有arm核心模组、外部编码器、霍尔传感器模组和rfid读卡器,所述外部编码器、霍尔传感器模组、rfid读卡器分别与arm核心模组的信号输入端连接;
4、所述外部编码器,用于将轮子行走的距离转换为脉冲数,通过can收发电路送入arm核心模组,arm核心模组再根据轮子的尺寸和外部编码器的脉冲数计算出巡检机器人行走的距离和速度;
5、所述霍尔传感器模组,当巡检机器人行驶到永久磁铁和rfid卡片的位置时触发,输出高电平;
6、所述rfid读卡器,在霍尔传感器模组触发时读取rfid卡片内部提前写入的里程和rfid卡片的id号,经过rfid_485电路送入arm核心模组,修正当前巡检机器人的位置信息。
7、进一步的,所述can收发电路包括can隔离收发器和气体放电管,所述气体放电管电连接在电机与can隔离收发器之间。
8、进一步的,所述霍尔传感器模组包括2个3线npn常闭型霍尔传感器,输出经隔离芯片进行电气隔离,且将5v开关信号转为3.3v开关量信号后送入arm核心模组检测霍尔开关状态。
9、进一步的,所述rfid_485电路包括串口隔离芯片、rs485收发器和rs485接口保护电路,所述串口隔离芯片、rs485收发器、rs485接口保护电路依次电连接,所述rs485接口保护电路通过接插件外接rfid读卡器。
10、相对于现有技术,本实用新型的有益效果在于:本实用新型提供的一种导轨式巡检机器人的复合定位系统,通过在机器人行驶导轨上设置永久磁铁和rfid卡片,在巡检机器人设置有arm核心模组、外部编码器、霍尔传感器模组和rfid读卡器,通过外部编码器和arm核心模组计算出巡检机器人行走的距离和速度,霍尔传感器模组在巡检机器人行驶到永久磁铁和rfid卡片的位置时触发,rfid读卡器在霍尔传感器模组触发时,读取机器人当前的里程和位置。该导轨式巡检机器人的复合定位系统可实现封闭环境内机器人精准定位,定位速度快,定位精度高。
技术特征:1.一种导轨式巡检机器人的复合定位系统,其特征在于:包括巡检机器人及设置在机器人行驶导轨上的永久磁铁和rfid卡片,所述巡检机器人设置有arm核心模组、外部编码器、霍尔传感器模组和rfid读卡器,所述外部编码器、霍尔传感器模组、rfid读卡器分别与arm核心模组的信号输入端连接;
2.根据权利要求1所述的一种导轨式巡检机器人的复合定位系统,其特征在于:所述can收发电路包括can隔离收发器和气体放电管,所述气体放电管电连接在电机与can隔离收发器之间。
3.根据权利要求1所述的一种导轨式巡检机器人的复合定位系统,其特征在于:所述霍尔传感器模组包括2个3线npn常闭型霍尔传感器,输出经隔离芯片进行电气隔离,且将5v开关信号转为3.3v开关量信号后送入arm核心模组检测霍尔开关状态。
4.根据权利要求1所述的一种导轨式巡检机器人的复合定位系统,其特征在于:所述rfid_485电路包括串口隔离芯片、rs485收发器和rs485接口保护电路,所述串口隔离芯片、rs485收发器、rs485接口保护电路依次电连接,所述rs485接口保护电路通过接插件外接rfid读卡器。
技术总结本技术公开一种导轨式巡检机器人的复合定位系统,包括巡检机器人及设置在机器人行驶导轨上的永久磁铁和RFID卡片,巡检机器人设置有ARM核心模组、外部编码器、霍尔传感器模组和RFID读卡器,所述外部编码器、霍尔传感器模组、RFID读卡器分别与ARM核心模组的信号输入端连接;通过外部编码器和ARM核心模组计算出巡检机器人行走的距离和速度,霍尔传感器模组在巡检机器人行驶到永久磁铁和RFID卡片的位置时触发,RFID读卡器在霍尔传感器模组触发时,读取机器人当前的里程和位置。该导轨式巡检机器人的复合定位系统可实现封闭环境内机器人精准定位,定位速度快,定位精度高。技术研发人员:欧阳开一,王齐受保护的技术使用者:中科开创(广州)智能科技发展有限公司技术研发日:20231130技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240718/234275.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表