一种列车随动装置的轨迹规划方法
- 国知局
- 2024-08-01 09:01:22
本发明涉及列车智能感知,尤其涉及一种列车随动装置的轨迹规划方法。
背景技术:
1、铁路事故给人民生命财产安全造成了巨大损失。这些事故都具有随机性强、处理时间紧、信息传递滞后等特点,给铁路安全带来了严峻挑战。
2、为了防止事故的发生,提高铁路安全水平,必须采取有效的应对措施。针对自然灾害和异物侵入高铁安全限界的情况,需要采取措施让列车能够快速主动感知危险并及时制动,进一步提高列车安全高效和自主运行能力。
3、列车随动装置是一种利用电机、传感器和控制器等组件,实现感知仪器的自动旋转和倾斜的装置,可以根据列车的速度等参数,以及线路的坡度、缓和曲线等静态特征,计算出感知仪器的最佳指向和视野,并通过控制电机的转速和角度,实现感知仪器的随动调节,从而保证感知仪器的高效工作。列车随动装置可以使得感知仪器能够根据列车的运行姿态和线路环境,自动调整其姿态和视野,以便及时发现线路上的潜在危险,从而保障高铁高精度主动感知仪器的有效工作。
4、高铁感知仪器和列车随动装置的开发和应用,是高铁安全运行的重要保障,也是高铁智能化和自主化的重要标志。它们能够有效地提高高铁的运行效率和安全性,为铁路事故的预防和减少提供了一种新的技术手段,也为高铁的未来发展创造了更多的可能性。在高铁感知仪器的设计中,除了考虑感知仪器的性能和精度外,还需要考虑其与列车的安装方式和位置,以及其与列车运行状态的协调性
5、列车在运行过程中,会遇到各种复杂的线路条件,如坡度、曲线、隧道和桥梁等,这些条件会影响感知仪器的工作效果,使感知仪器无法直接按照固定方向采集信息。因此,对于感知仪器,如何在复杂的线路条件和运行工况下,实时、精准地捕获感知视野,是一项亟待解决的难题。
技术实现思路
1、本发明的实施例提供了一种列车随动装置的轨迹规划方法,以实现有效地为列车危情感知仪提供实时最优感知视野,进而保障列车运行安全。
2、为了实现上述目的,本发明采取了如下技术方案。
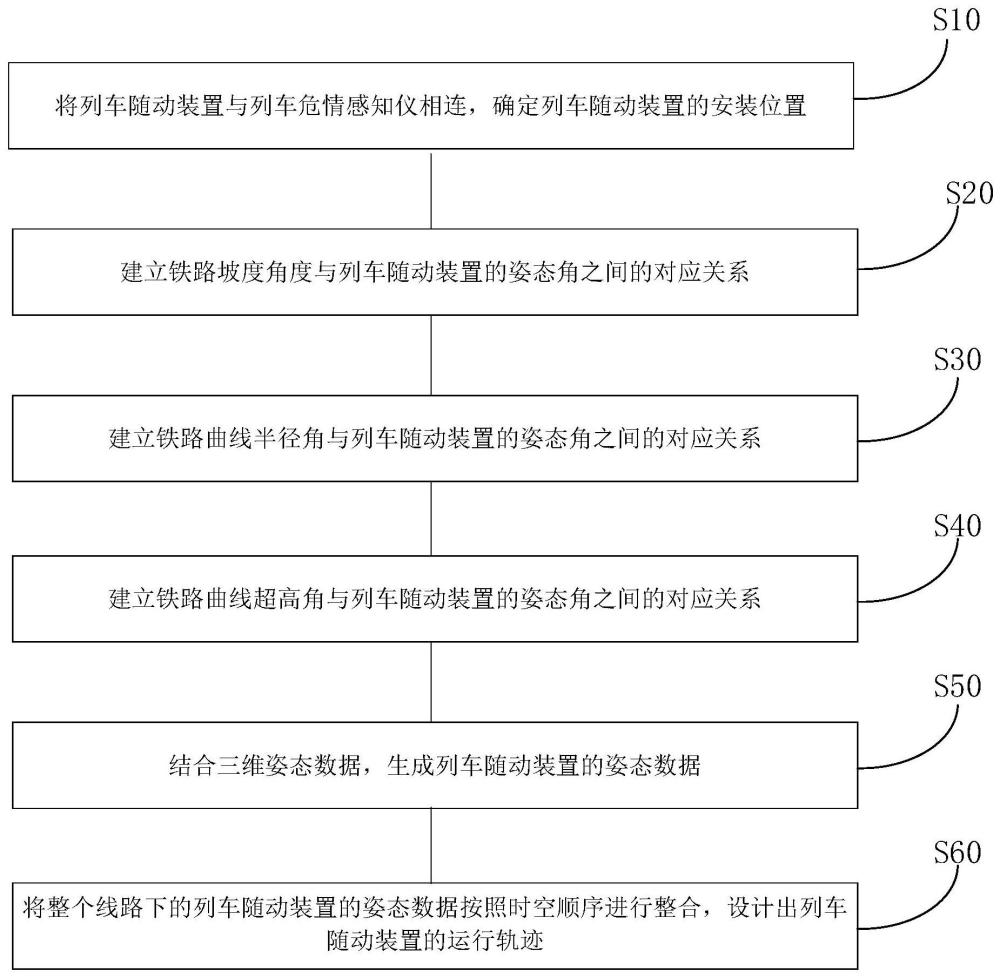
3、一种列车随动装置的轨迹规划方法,包括:
4、将列车随动装置与列车危情感知仪相连,确定所述列车随动装置的安装位置;
5、获取列车运行过程中的线路坡度角度、线路曲线半径角和线路曲线超高角,根据线路坡度角度、线路曲线半径角和线路曲线超高角对所述列车随动装置的姿态角进行实时调整;
6、结合三维姿态数据,生成列车随动装置的姿态数据,将整个线路下的列车随动装置的姿态数据按照时空顺序进行整合,获取所述列车随动装置的运行轨迹。
7、优选地,所述的将列车随动装置与列车危情感知仪相连,确定所述列车随动装置的安装位置,包括:
8、确定列车运行的线路,采集线路的静态信息,该静态信息包括长度、宽度、坡度、曲线半径和超高参数;
9、将列车随动装置固定设置于列车头部的列车车顶的位置,将带显示界面的工控机放置于列车内部的机箱当中,在列车内部安装倾角传感器,利用倾角传感器对列车随动装置的姿态进行实时监测和补偿;
10、列车随动装置由静平台和动平台组成,静平台与列车顶部相连接,在动平台上放置列车危情感知仪,以静平台与列车顶部共同建立的b-xyz平面为基准,以动平台的p-xyz平面为目标,建立坐标系,列车随动装置y轴与列车顶部中心线对齐。
11、优选地,所述的获取列车运行过程中的线路坡度角度、线路曲线半径角和线路曲线超高角,根据线路坡度角度、线路曲线半径角和线路曲线超高角对所述列车随动装置的姿态角进行实时调整,包括:
12、在列车中设置处理器,该处理器与所述倾角传感器连接,在处理器中存储线路坡度角度与列车随动装置的姿态角之间的对应关系、线路曲线半径角与列车随动装置的姿态角之间的对应关系和线路曲线超高角与列车随动装置的姿态角之间的对应关系;
13、所述处理器实时计算出列车运行过程中的线路坡度角度、线路曲线半径角和线路曲线超高角,根据存储的所述对应关系计算出对应的列车随动装置的目标姿态角,将目标姿态角实时传输给倾角传感器,倾角传感器根据接收到的目标姿态角对列车随动装置的姿态角进行实时调整。
14、优选地,所述的线路坡度角度与列车随动装置的姿态角之间的对应关系,包括:
15、假设列车经过的线路坡度为g,则列车随动装置需要绕x轴转动的角度为g;
16、处理器使用以下公式计算线路坡度角度g:
17、
18、其中,δh是高度差,δx是水平距离,坡度的单位通常是百分比,表示每100米水平距离的高度变化。
19、优选地,所述的线路曲线半径角与列车随动装置的姿态角之间的对应关系,包括:
20、当列车经过的线路曲线为圆曲线时,列车随动装置绕z轴转动的角度α的计算公式为:
21、α=2arcsin(l/2r) (2)
22、其中,l为线路曲线长度,r为线路曲线半径;
23、当列车经过的线路曲线为缓和曲线时,线路缓和曲线半径ψ的计算公式为:
24、
25、列车随动装置绕z轴转动的角度为α。
26、优选地,所述的线路曲线超高角与列车随动装置的姿态角之间的对应关系,包括:
27、设列车经过的线路曲线超高角为γ,则列车随动装置绕x轴转动的角度为γ;
28、处理器实时计算线路曲线超高角的公式如下:
29、
30、其中,γ表示线路曲线超高角度,h表示超高,s为钢轨中心距。
31、优选地,所述的结合三维姿态数据,生成列车随动装置的姿态数据,包括:
32、根据列车运行线路,将线路分为若干段,每段线路的地形特征包括平直段、上坡段、下坡段和曲线段;
33、对于每段线路,处理器计算出列车随动装置的目标姿态角;
34、根据列车的运行速度vm和线路的长度s,计算出列车通过每段线路的时间,即t;
35、
36、假设列车随动装置从当前姿态角转动到目标姿态角所需的时间为δt,δt<t,列车随动装置在列车通过该段线路的时间内完成随动,并保持目标姿态角不变,直到进入下一段线路,将目标姿态角和对应的时间点记录为列车随动装置的姿态数据。
37、优选地,所述的结合三维姿态数据,生成列车随动装置的姿态数据,将整个线路下的列车随动装置的姿态数据按照时空顺序进行整合,获取所述列车随动装置的运行轨迹,包括:
38、将列车随动装置的姿态数据按照空间顺序排列,得到一个由姿态角和时间点组成的序列,即{(θi,αi,γi,si)}n i=1,其中n为线路段的数量,si表示线路段的序号,θi表示列车随动装置在第i路段绕x轴转动的角度,αi表示列车随动装置在第i路段绕z轴转动的角度,γi表示列车随动装置在第i路段绕y轴转动的角度;
39、根据列车的运行速度,计算出列车的位置坐标,即(xi,yi,zi),其中xi为列车沿着线路方向的坐标,yi为列车垂直于线路方向的坐标,zi为列车的高度坐标,同时获得列车通过每段线路的时间,即ti;
40、将列车随动装置的姿态角和列车的位置坐标、时间约束组合起来,得到一个由列车随动装置的姿态和位置组成的序列,即{(θi,αi,γi,xi,yi,zi,ti)}n i=1,将所述序列作为列车随动装置的运行轨迹。
41、由上述本发明的实施例提供的技术方案可以看出,本发明实施例提供的列车随动装置的轨迹规划方法能够提前规划列车随动装置的随动姿态,方便实时有效地为列车危情感知仪提供实时最优感知视野,进而保障列车运行安全,提高感知仪器的工作效率和准确性,降低感知仪器的工作负荷和能耗,延长感知仪器的使用寿命,减少感知仪器的维护成本。
42、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240718/234485.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表