一种基于虚拟连挂的智能网联跨座式单轨系统
- 国知局
- 2024-08-01 09:08:00
本发明涉及轨道交通领域,具体公开了一种基于虚拟连挂的智能网联跨座式单轨系统。
背景技术:
1、当前,新一代信息技术的发展给传统城市轨道交通建设、运营、服务方式带来了冲击,同时也带来新的发展契机。在此时代背景下,城市轨道交通建设领域推行信息化管理与数字化转型是必然发展趋势。
2、传统的轨道交通整体系统复杂、各类设施设备的规模庞大、运营成本极高;且车辆编组唯一,无法根据不同时段、客流变化进行实时编组,线路运量相对固定,导致在客流量较小时出现运力浪费、车辆配置过多等问题。
3、传统的轨道交通车辆通信一般采用车—地通信技术,如基于环线传输的车辆运行控制方式、漏泄同轴电缆传输方式、裂缝波导管传输方式和基于无线自由波传输方式等,前述通信技术大多存在通信方式复杂、传输效率低下的问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于虚拟连挂的智能网联跨座式单轨系统,以解决如何实现车辆实时编组的技术问题。
2、为达到上述目的,本发明提供如下技术方案:
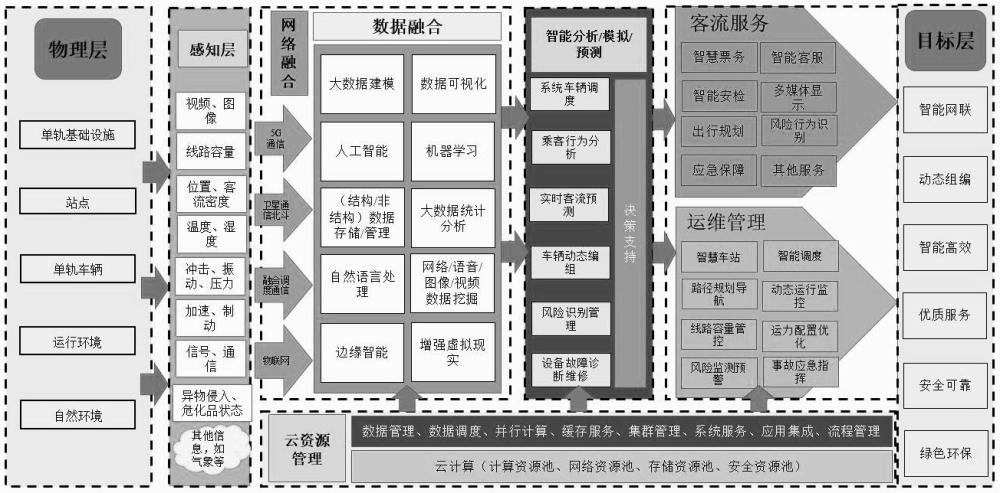
3、一种基于虚拟连挂的智能网联跨座式单轨系统,包括动态感知单元、自主决策单元、动态组编单元和自主控制单元;所述动态感知单元对轨道交通客流量数据进行动态获取并通过数据挖掘技术对客流量变化做出实时预测形成客流量预测值;所述自主决策单元在接收到实时的客流量预测值后,在云平台自主形成列车编组方案;动态组编单元是云平台根据列车编组方案向列车发送组编信号,触发列车间自动进行组编;自主控制单元是列车按编组车辆行车流程自动驾驶行车。
4、可选地,所述动态感知单元包括智能网联跨座式单轨系统线路站点和站点区间的短期客流量预测;包含站点客流量和站点区间客流量的预测,同时分析不同站点一周内的客流特点,进行分类建模。
5、可选地,自主控制单元包括有虚拟连挂,所述虚拟连挂是基于车车通信和分布式控制来实现协同控制,车辆之间保持着较小的相对制动距离而不采用物理连挂方式。
6、可选地,包括有车辆避撞主动控制系统,设置车辆最小安全间距为触发机制,当单车辆因车速的变化导致与前车间距减小至安全间距以内时,车辆感应到后立即启动紧急制动系统,防止与前车相撞;同时,制动期间后车必然与前车间距会缩小,后车也会因触发到最小安全间距而与该单车辆产生相对制动,从而实现基于相对距离制动模式(rdbm)的跟随车辆避撞策略。
7、可选地,系统运行方式分为常规运行模式和协同运行模式;
8、常规运行模式即车辆按照预先设置的运行方案依序运行,包括行车、进站停车、折返线或车辆检修中心停车、过道岔、正线上车辆故障救援和出站;
9、协同运行模式:当系统通过现行实时客流数据感知和智能预测到短时客流量有较大幅度变化时,系统进入协同运行模式,其主要包括动态编组和动态解编两种运行场景,所有编组与解编均采用虚拟连挂(virtual coupling)方式。
10、可选地,所述常规运行模式如下:
11、(1)行车;云平台、车辆检修中心、stc向车辆发送唤醒信息,当车辆单车行驶时,通过车车通信获取前后车辆距离、速度和加速度信息,通过vc控制牵引和制动,根据前方线路信息与车辆自身牵引制动能力,按照高效,安全,舒适的原则行驶。当车辆为编组车辆行驶时,领航车辆通过车地或车车通信获取前方信息和前方车辆信息,通过vc(车载控制器)控制牵引和制动,根据前方线路信息与车辆自身牵引制动能力,按照高效,安全,舒适的原则行驶。而非领航车辆则通过车车通信获取前后车辆距离、速度和加速度信息,通过vc(车载控制器)控制牵引和制动,跟随前车行驶。车辆行驶时,车距传感器会实时监测车距,当车距小于或等于危险车距时,立即启动智能防碰撞系统,同时vc(车载控制器)立即控制牵引制动调整车距,实现车距大于危险车距。
12、(2)进站停车。当车辆经过站前第一个停车距离感应器时,通过与设置在轨道梁上的停车距离感应器感应,计算车辆距离停车点的距离,通过车载控制器调整牵引制动,通过车地通信,在车辆车门对中后车站控制器stc开启屏蔽门。
13、(3)折返线或车辆检修中心停车。当行驶车辆即将进入折返线或车辆检修中心停车时,车辆通过与设置在轨道梁上的停车距离感应器感应,计算车辆距离停车点的距离,调整牵引制动,将车辆停靠在折返线或车辆检修中心。
14、(4)通过道岔。车辆经过轨道上的道岔感应器,向道岔控制器swc发送请求操作道岔命令。道岔此时若未被占用,则同意车辆操作道岔;若道岔为占用状态,则车辆减速停车等待道岔开放。同时swc接受车辆发送的上岔方向等信息,自动调整道岔工作状态与车辆方向一致。正线上为保证车辆快速通过道岔,轨道上的道岔感应器位置有所提前,使车辆提前控制道岔,快速通过。
15、(5)正线上车辆故障救援。当正线运营车辆发生故障时,云平台收到信息后将立即采取措施,防止线路上其他行驶车辆进入事发区段,同时保证乘客要到达的车站站台区段空闲,根据需要做出调整线路运行方案的决策。故障车辆向云平台发送故障信息,云平台判断故障车辆是否能移动。若故障车辆不能移动,云平台向车辆检修中心发送救援指令,由车辆检修中心实施故障检修;若故障车辆能移动,云平台则就近调度车辆前来救援。
16、(6)出站。车辆向stc发送车辆准备出站信息,stc发送关闭屏蔽门指令,屏蔽门关闭,车辆运行出站。编组最后车辆向stc发送车辆准备出站信息,stc发送关闭屏蔽门指令,屏蔽门关闭,车辆编组运行出站。
17、可选地,协同运行模式:当系统通过现行实时客流数据感知和智能预测到短时客流量有较大幅度变化时,系统进入协同运行模式,其包括动态编组和动态解编两种运行场景,所有编组与解编均采用虚拟连挂(virtual coupling)方式,即不建立物理车钩,采用虚拟车钩的方式形成新的编组方案;不同场景运行模式如下:
18、(1)车辆进站连挂;在客流高峰时段或接收到某一具体站点大数据实时客流增长的预测信息后,领航车辆在车站停车,编组跟随车辆折返线或者停车库出车,进入站台区域进行连挂;等待编组跟随车辆全部进站后,在车站按信号指令要求进行虚拟编组,编组间距为df。车辆按行车计划完成编组后以虚拟连挂状态发车,所有车辆保持同一车速v0行驶。
19、(2)车辆追踪连挂;在客流低峰时段,车辆一般以单车辆行驶在线路上,若站点客流异常增加,则车辆在进站前进行编组;行驶在线路上的单个车辆即可按照信令进行虚拟连挂编组;假设距离为δd的两辆车辆行驶在两站点间的线路上,前车速度为vl,后车速度为vf;此时两车辆同时收到编组信令,指定前车为领航车辆,后车为跟随车辆,根据进行连挂的过程中车辆位置、运行速度,将连挂场景分为加速连挂和减速连挂,加速连挂场景适用于领航车辆车速大的情况,减速连挂场景适用于跟随车辆车速大的情况:
20、①加速连挂场景;当vl>vf时,跟随车辆需要提升自身速度追赶领航车辆,;车辆在轨道线路运行时,车车间距δd大于编组间距df,;运行在同一线路的两辆车辆,达到基本判定点时,间距满足;在此状态下,后方跟随车辆需先进行从vf1加速至vf2,减小间距,以便与领航车辆组编完成虚拟连挂;当加速至vf2后,跟随车辆又需立刻进行减速,直至车车间距δd正好等于编组间距df时,vf2减速至vl,此时两车辆即完成了虚拟连挂,以同一速度vl向站点驶去;
21、②减速连挂场景;当vl<vf时,跟随车辆需要降低自身速度保持相对制动距离与领航车辆实现虚拟连挂;在此状态下,后方跟随车辆需先进行从vf1减速至vf2,减小间距后再立刻进行加速,直至车车间距δd等于编组间距df时,vf2加速至vl,实现等速运行,此时两车辆即完成了虚拟连挂,以同一速度vl向站点驶去;
22、(3)车辆连挂运行;当跟随车辆和领航车辆在上述场景下完成虚拟连挂共同运行后,只要两车在行驶中始终保持间距、速度差值在允许范围内浮动即可一直保持虚拟连挂状态行驶,便可以认定两车之间实现了虚拟连挂;处于虚拟连挂模式下的多编组车辆可以被视为一组长车辆编组,跟随车辆可以以相同的加速度随着领航车辆加速,也可以相同的制动减速度随着领航车辆减速;在连挂运行场景下,车辆间可以进行数据的交互,调整自身运行状态,保持虚拟连挂状态继续行驶;
23、(4)车辆出站解挂;虚拟连挂后的解挂过程相对来说比较简单,只需要给车辆发送相应的解挂信令即可;在客流低峰时段或接收到某一具体站点大数据实时客流减少的预测信息后,为提升线路和车辆使用率,避免运力浪费,需要对虚拟连挂下的多编组车辆进行解挂;当客流量到达低峰时段时,一列多编组车辆在车站停车,将其全部解挂为车辆后重新发车行驶,此时每一个车辆都是领航车辆,按位置前后顺序驶出站点,此时车辆的行驶速度可根据车辆的不同目的地及相应的任务执行情况而设置;另外一种情况是当客流量从高峰降低到平峰而并未到低峰时段时,多编组车辆并不需要全部解挂为车辆运行,只需将长编组车辆部分解挂为多个短编组车辆运行,此时每一个短编组车辆都可在原来的基础上继续行驶,按位置前后顺序驶出站点;当轨道交通客流量因外界因素变化处在极低的水平或者临近午夜轨道交通即将停运时,轨道线上的车辆并不需要全部运行,只需将长编组车辆部分解挂,多余车辆暂时开进道岔停放,剩余车辆则继续运行;此时短编组车辆可在原来的基础上继续行驶,待至前车驶进道岔停放后可直接驶出站点;道岔停放的车辆如若要折返或者驶回检修中心停放,则待至运行车辆出清道岔分合点后可驶出道岔进路办理再行发车。
24、(5)车辆运行解挂;当轨道交通客流量降低时,为避免多余的运力浪费,一列多编组虚拟连挂车辆需要解挂;解挂时间节点包括在车辆运行到达距离最近的站点停止后解挂;多编组虚拟连挂车辆也可以在轨道线路运行过程中解挂;解挂场景包括:间距过长被动解挂和间距过短主动解挂;其中间距过长被动解挂:车辆因轨道坡度或发生故障等意外原因导致车速降低,致使车车间距超出编组间距规定范围,这时编组车辆便会达成自动解挂;间距过短主动解挂:领航车辆因轨道坡度或发生故障等意外原因导致车速降低,致使车车间距低于虚拟连挂中设置的最短防撞距离,编组车辆便会主动解挂,跟随车辆开始紧急制动减速:
25、可选地,间距过长被动解挂:当δd>df时,编组车辆便会感应到变化达成自动解挂,当达成自动解挂时,跟随车辆的行驶速度vf肯定是小于vl;正在线路上运行的编组虚拟连挂车辆因后方跟随车辆出现意外减速的情况,车速从vf1减速至vf2,导致两车间距增大,超出了编组间距规定的范围,此时该编组虚拟连挂车辆便会被动达成解挂;解挂后,领航车辆仍然以车速vl向前行驶,而跟随车辆则以车速vf2向前行驶;若后续两车仍有连挂的需求,在满足虚拟连挂的要求后,可转入加速连挂场景;
26、间距过短主动解挂;当δd<df时(假设此时车车间的最短防撞距离为编组间距df),跟随车辆便会感应到变化主动与领航车辆解挂;当达成主动解挂时,跟随车辆的行驶速度vf大于vl;正在线路上运行的编组虚拟连挂车辆因前方领航车辆出现意外减速的情况,车速从vl1减速至vl2,导致两车间距减小,低于了编组间距规定的最短防撞距离,此时跟随车辆便会主动与领航车辆解挂;解挂后,跟随车辆则会立刻采取紧急制动措施,将车速降至小于领航车辆当前时刻的车速,以增大车距;若后续两车仍有连挂的需求,在满足虚拟连挂的要求后,可转入加速连挂或减速连挂场景;
27、可选地,还包括车辆主动避撞模式;虚拟编组车辆在加速出站、减速进站及运行遇障碍物主动避撞:
28、(1)加速出站主动避撞;当车辆在站点完成虚拟连挂后,即将加速出站;若前车速度在t时刻小于后车速度,则两车间距会逐渐减小;后车车头感应到与前车车尾间距减小至安全间距ds时,将立即启动紧急制动,后车开始刹车制动,而前车则继续按原信令计划加速至vl3;后车制动,前车加速,车车间距将继续减小一小段距离后开始逐渐增加,直至当前时刻车车间距d大于安全间距ds后,后车制动便停止。
29、(2)减速进站主动避撞;当车辆正常运行至即将进站停车时,必然有一个逐渐减速的过程。如若前车速度在t时刻大于后车速度,则两车间距会逐渐增大,如若前车速度在t时刻小于后车速度,则两车间距会逐渐减小,有发生碰撞的风险。当后车车头感应到与前车车尾间距减小至安全间距ds时,后车将在原来正常减速制动的基础上继续启动紧急制动,车辆减速度进一步增大,而前车则继续按原信令计划减速,车车间距也将在极短时间内继续减小一小段距离后开始逐渐增加,直至当前时刻车车间距d大于安全间距ds后,后车制动便停止,两车成功实现了避撞。
30、(3)车辆运行遇障碍物主动避撞;当车辆前方出现障碍物,随着虚拟编组车辆继续前行,正好与障碍物的距离减小至安全间距ds时,领航车辆感知后将立即启动紧急制动,车速迅速下降;而跟随车辆与领航车辆此时仍处在虚拟编组间距内,并未达到安全间距ds的要求,所以制动还未启动,车速保持不变;下一时刻领航车辆继续制动,而跟随车辆则继续匀速前行,直到跟随车辆的车头与领航车辆的车尾间距减小至安全间距ds时,跟随车辆启动紧急制动,车速迅速下降,直至所有车辆停止。
31、本方案的工作原理及有益效果在于:
32、本方案中通过虚拟连挂的方式进行编组,该方式无物理连挂结构,所以可以通过云平台快捷的调整车辆编组;同时云平台能够分析每个站点和站点区间的客流量,根据客流量实时调整车辆编组情况。本方案中通过判断领航车辆和跟随车辆的速度快慢,还可以选择加速连挂和减速连挂的方式完成车辆的虚拟连挂编组,同时也具有相应的防碰撞的机制。
本文地址:https://www.jishuxx.com/zhuanli/20240718/235033.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表