可分离式陆空两栖轮腿复合机器人
- 国知局
- 2024-08-02 16:21:42
本发明涉及机器人,尤其涉及可分离式陆空两栖轮腿复合机器人。
背景技术:
1、轮腿式机器人能够结合轮式机器人高机动性和足式机器人高复杂环境适应性优势,突破双足机器人非结构地面环境下适应能力较弱、响应速度较慢、机动性不高等问题。然而面对存在高大障碍物的复杂环境时,飞行机器人可以很好地克服任何大小的障碍物或任何条件下的地面,因此将轮腿式机器人和飞行机器人结合形成的陆空两栖轮腿复合机器人可以有效解决所面临的问题。陆空两栖轮腿复合机器人具有空中飞行和地面移动能力的双运动模态,比只有单一运动模式的机器人更有优势,通过结合可解决轮腿式机器人无法跨越高大障碍物,飞行机器人能耗大,飞行和操作时间短,机载资源和有效载荷重量有限等问题,同时通过不同运动模式之间的适当切换,更好地实现机器人在具有挑战性的未知复杂环境中快速移动到达目标位置的能力,使其成为抢险救灾,搜索救援或线路巡检等应用的绝佳选择。
2、在面对一些复杂环境或多重任务需求时,单纯的地面机器人和空中机器人由于自身固有的缺陷,不能满足复杂环境的多重任务要求。地面机器人的活动范围有限,遇到沟壑山陵等存在高大障碍物以及低洼河流等复杂地面却难以跨越。空中机器人能耗大,续航能力弱,执行任务的时间往往不能满足长时间工作的需求,且机载资源和有效载荷重量有限。此外,在一些特殊情况下,空中机器人的运动稳定性可能不如地面机器人。因此,为了让机器人适灵活应对多变的周围环境,更好地满足多任务的需求,结合飞行机器人和地面机器人优点的陆空两栖机器人应运而生。
3、现有专利(公告号:cn 217969152 u)一种陆空两栖机器人,此实用新型专利提供了一种陆空两栖机器人,其机器人将四轮小车与四旋翼飞行器进行了结合,两者之间采用固定连接无法进行分离,同时其四旋翼飞行器的机臂也无法折叠,在地面运动时所占空间大,无法在室内等狭小环境中运动。现有专利(公告号:cn 210026930 u)可分离式陆空两栖应急侦察机器人,此实用新型专利提供了一种可分离式陆空两栖应急侦察机器人,其机器人采用了可分离结构可实现地面机器人与空中机器人的分离,但其机器人的分离需要人进行操作才可实现,无法做到机器人自主独立的分离与结合。
技术实现思路
1、为了解决现有技术中存在的不足,本技术提出了可分离式陆空两栖轮腿复合机器人,本发明所设计的复合机器人既可以解体分离成轮腿复合机器人和四旋翼飞行器两个机器人,又可以结合形成整体的陆空两栖轮腿复合机器人,解决了现有陆空两栖机器人存在的能量利用效率低下,负载能力低,地空过渡困难以及地面运动与机器人的姿态变化严重耦合等问题。此外,本发明还通过凸轮机构、齿轮机构、间歇机构等多种机械结构的配合,降低机器人的控制自由度,从而降低控制系统的复杂程度。
2、本发明所采用的技术方案如下:
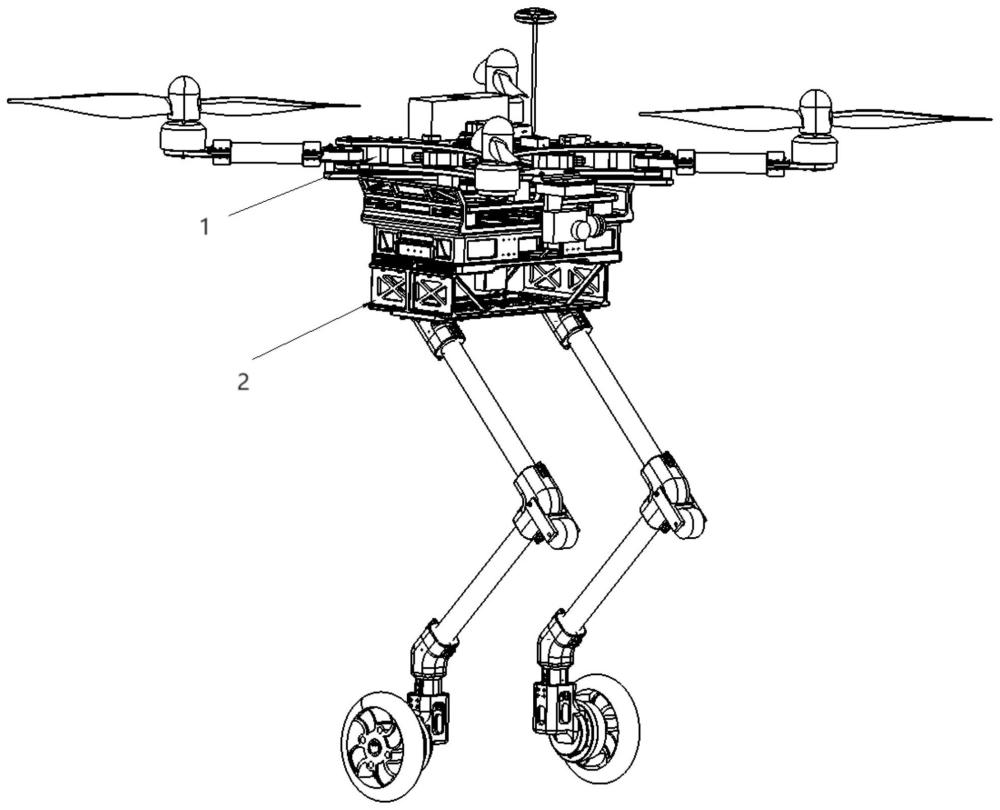
3、可分离式陆空两栖轮腿复合机器人,其特征在于,包括四旋翼飞行器和轮腿复合机器人两部分;所述四旋翼飞行器的底部设有机臂折叠与自锁结构,所述机臂折叠与自锁结构包括弹簧滑块自锁机构和四连杆折叠机构;
4、所述四连杆折叠机构包括驱动连杆,所述驱动连杆可转动安装在四旋翼飞行器底部中心,所述驱动连杆通过中间连杆与机臂连接,带动机臂展开或收缩;所述驱动连杆中心开设传动孔;
5、所述弹簧滑块自锁机构包括限位滑块;所述限位滑块在四旋翼飞行器的中心处沿竖直方向可滑动安装,所述限位滑块配有复位器;在复位器作用下,所述限位滑块插入驱动连杆的传动孔,对驱动连杆进行锁定;在限位滑块收到外力推挤从传动孔中脱离;
6、所述轮腿复合机器人包括胸腔主体、腿部、主动轮、被动轮;
7、所述胸腔主体上方设置粗导向框架,与四旋翼飞行器进行粗导向;
8、所述胸腔主体上设有凸轮机构、间歇机构、齿轮机构;所述凸轮机构包括凸轮、锁定滑块;所述凸轮)配有驱动单元,在所述凸轮的两侧分别设有锁定滑块,所述锁定滑块配有复位器;凸轮行程增大时推动锁定滑块向两侧移动且与起落架卡合,四旋翼飞行器和轮腿复合机器人结合;凸轮行程减小时,在复位器作用下锁定滑块复位,四旋翼飞行器和轮腿复合机器人分离;
9、所述齿轮机构包括主动齿轮和被动齿轮,所述主动齿轮与凸轮共轴且同步运动,主动齿轮和被动齿轮相互啮合传动;
10、所述间歇机构包括同轴布置的间歇传导件和间歇圆盘,所述间歇圆盘和被动齿轮同轴安装;所述间歇传导件的顶部结构与驱动连杆的传动孔相配合,用于四旋翼飞行器和轮腿复合机器人结合的细导向,以及结合时对四旋翼飞行器的机臂展开或收缩进行驱动;
11、所述腿部连接在胸腔主体下方,所述腿部包括大腿和小腿,在膝关节处可转动安装被动轮,在小腿底部可转动安装主动轮。
12、进一步,所述复合机器人或轮腿复合机器人均能通过主动轮实现双轮运动模态,或通过跪姿实现主动轮加被动轮的四轮运动模态。
13、进一步,复合机器人的运动模态分为:四旋翼飞行器和轮腿复合机器人分离时,各自执行飞行运动模态、地面运动模态;四旋翼飞行器和轮腿复合机器人结合时,整体执行飞行运动模态、地面运动模态或飞行与地面协同运动模态。
14、进一步,在所述小腿的下端装有缓冲机构,所述缓冲机构包括阻尼器、弹簧,通过压缩吸收冲击能量。
15、进一步,弹簧滑块自锁机构包括限位滑块固定件、滑块固定件;由限位滑块固定件、滑块固定件沿竖直方向固定在机身上,限位滑块与由限位滑块固定件、滑块固定件可滑动连接,且在限位滑块的顶部设置弹簧;驱动连杆通过轴承套装在限位滑块的外部;间歇传导件的顶部结构插入驱动连杆的传动孔时,限位滑块和弹簧向上移动,由间歇传导件带动驱动连杆转动折叠机翼;间歇传导件的顶部结构离开驱动连杆的传动孔时,弹簧推动限位滑块向下移动落入驱动连杆的传动孔中,实现自锁。
16、进一步,锁定滑块的复位器是在锁定滑块与粗导向框架之间设置弹簧,锁定滑块在凸轮推动下向两侧移动时弹簧被压缩,在弹簧作用下锁定滑块复位;在锁定滑块与凸轮的接触处设置滚轮。
17、进一步,所述驱动连杆的传动孔为四叶草形状的腔体。
18、进一步,所述四旋翼飞行器还包括制系统以及视觉感知系统组成,所述控制系统包括pixhawk飞控板、gps支架及gps、接收机、电调、电池;所述视觉感知系统包括运动相机、相机云台以及图传模块组成,用于四旋翼飞行器与底部轮腿复合机器人结合时的视觉定位。
19、进一步,所述pixhawk飞控板下增设飞控减震板。
20、进一步,所述gps通过gps支架。
21、本发明的有益效果:
22、(1)本发明所提供的陆空两栖轮腿复合机器人具有多种运动模态,其既可以解体分离成轮腿复合机器人和四旋翼飞行器两个机器人,又可以结合形成整体的陆空两栖轮腿复合机器人。当分离成轮腿复合机器人和四旋翼飞行器两个机器人时,两个机器人可以单独的进行各自的地面运动和飞行运动,并且轮腿复合机器人在地面运动时既可以进行双轮运动又可以进行四轮运动,两个机器人可以进行陆空协同作业,如进行陆空协同的全方位一体化侦查。当结合形成整体的陆空两栖轮腿复合机器人时,机器人同时具有地面运动能力和飞行运动能力,并且在地面运动时,可以根据所处环境的不同控制四旋翼飞行器的机臂是否收缩,当机器人处于碎石等非结构化地面环境中时,机臂可以展开和底部的轮腿复合机器人进行协同控制,辅助机器人进行地面运动;当机器人处于室内等狭窄环境中时,机臂可以收缩,降低机器人所占空间的体积;当机器人面临高大的建筑时,机器人可以直接进行飞行运动,飞越高大的障碍。解决了现有陆空两栖机器人存在的能量利用效率低下,负载能力低,地空过渡困难以及地面运动与机器人的姿态变化严重耦合等问题,实现空中运动模式与地面运动模式之间的良好配合,保证机器人强大的飞行能力和灵活的地面移动能力,使其在复杂崎岖的非结构化环境中具有高灵活性和高穿越性。
23、(2)本发明所提供的陆空两栖轮腿复合机器人,组成其的轮腿复合机器人和四旋翼飞行器两个机器人可以进行自主的分离结合,不需要人进行辅助干预。在两个机器人由分离状态进行自主结合时,通过视觉定位辅助,利用粗导向加细导向的双重导向机制保证两个机器人结合的准确性和稳定性。当四旋翼飞行器和轮腿复合机器人由分离状态切换到结合状态时,首先位于四旋翼飞行器上的视觉感知系统通过视觉定位找到轮腿复合机器人的位置,然后根据视觉定位得到的位置飞行到轮腿复合机器人的上方,四旋翼飞行器降低高度,通过位于胸腔主体的粗导向框架对四旋翼飞行器进行粗导向定位,保证四旋翼飞行器降落的左右方向的位姿是准确的,当粗导向定位完成后,四旋翼飞行器继续降低高度,然后通过间歇传导件和四旋翼飞行器上驱动连杆的四叶草形状进行细导向,随着间歇传导件上端的长方体进入到驱动连杆的四叶草形状中,四旋翼飞行器即处于正确的位姿,完成轮腿复合机器人和四旋翼飞行器两个机器人的精准导向结合。
24、(3)本发明所提供的陆空两栖轮腿复合机器人,其顶部的四旋翼飞行器的机臂在两个机器人结合之后可以进行折叠,根据机器人所处的工作环境选择机臂是折叠还是展开。四旋翼飞行器的机臂折叠机制采用四连杆组成的曲柄摇杆机构实现,只需要驱动中心的驱动连杆旋转即可同时实现四个机臂的折叠。
25、(3)本发明所提供的陆空两栖轮腿复合机器人为简化无人机的重量以及控制和设计的复杂性,将轮腿复合机器人和四旋翼飞行器两个机器人进行自主分离结合的自由度与四旋翼飞行器机臂折叠的自由度结合成一个自由度,由位于轮腿复合机器人胸腔主体中的舵机进行驱动。两个控制自由度的结合通过位于轮腿复合机器人胸腔主体中的凸轮机构,齿轮机构,槽轮间歇机构以及四旋翼飞行器中的四连杆折叠机构和弹簧滑块自锁机构实现。凸轮机构用于控制锁定滑块的位置,当锁定滑块外推进入四旋翼飞行器的起落架时,轮腿复合机器人和四旋翼飞行器处于固连状态,当锁定滑块内推脱离四旋翼飞行器的起落架时,轮腿复合机器人和四旋翼飞行器解除固定连接。齿轮机构用于过渡旋转运动,将驱动四旋翼飞行器机臂折叠的间歇传导件过渡到机器人的正中心,使四旋翼机器人可以降落在轮腿复合机器人的正中心。槽轮间歇机构用于区分旋转运动是否驱动四旋翼飞行器的机臂是否折叠,当舵机进行第一阶段的76度旋转时,槽轮间歇机构处于间歇状态,此时舵机旋转只控制锁定滑块的外推而不驱动四旋翼飞行器的机臂折叠,当舵机进行第二阶段的84度旋转时,槽轮间歇机构处于工作状态,此时舵机旋转可驱动四旋翼飞行器的机臂折叠,由于凸轮行程保持不变,因此锁定滑块位置保持不变。当需要机臂展开时,只需要舵机反转84度即可,若需轮腿复合机器人与四旋翼飞行器解体分离,舵机再反转76度即可。弹簧滑块自锁机构用于当机器人解体成为轮腿复合机器人和四旋翼飞行器两个机器人时,将机臂折叠的四连杆机构中的驱动连杆锁住,使其不再能进行旋转,从而将单独的四旋翼飞行器锁定在机臂完全展开的状态,保证单独的四旋翼飞行器能更好的完成各种飞行运动。
26、(4)本发明所提供的陆空两栖轮腿复合机器人的轮腿复合机器人腿部下端与轮胎连接处采用缓冲结构,当机器人在崎岖路面上运动或者机器人从空中降落到地面时,机器人会受到很大的冲击,通过阻尼器和弹簧吸收冲击能量,减小冲击对机器人机械零件和电子元器件的损害,当冲击消失后,通过弹簧力将机器人恢复到原本位置。通过将缓冲机构竖直放置以及利用导轨滑块限位和减小摩擦,使机器人在缓冲冲击时只在竖直方向运动,保持机器人的重心只在平衡位置的竖直方向变化,不会影响机器人的平衡。
本文地址:https://www.jishuxx.com/zhuanli/20240718/250420.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。