避免车辆碰撞的控制方法、装置、车辆及存储介质与流程
- 国知局
- 2024-08-02 16:33:11
本发明涉及车辆控制领域,尤其是涉及一种避免车辆碰撞的控制方法、装置、车辆及存储介质。
背景技术:
1、在现有技术中,车辆通常采用前置毫米波雷达与前视摄像头融合的方案实现自适应巡航功能,当摄像头出现丢帧的情况时,可以通过毫米波雷达来感知找回丢失的数据,有效保证了自适应巡航功能的安全性。而当车辆仅有前视摄像头时,在摄像头出现丢帧的情况下,无法获取前方路况信息且没有其他传感器补替,可能会导致自适应巡航功能退出,感知目标丢失,车辆速度突变,碰撞等事故的发生,进而影响用户体验和生命财产安全。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的目的在于提出一种避免车辆碰撞的控制方法、装置、车辆及存储介质。
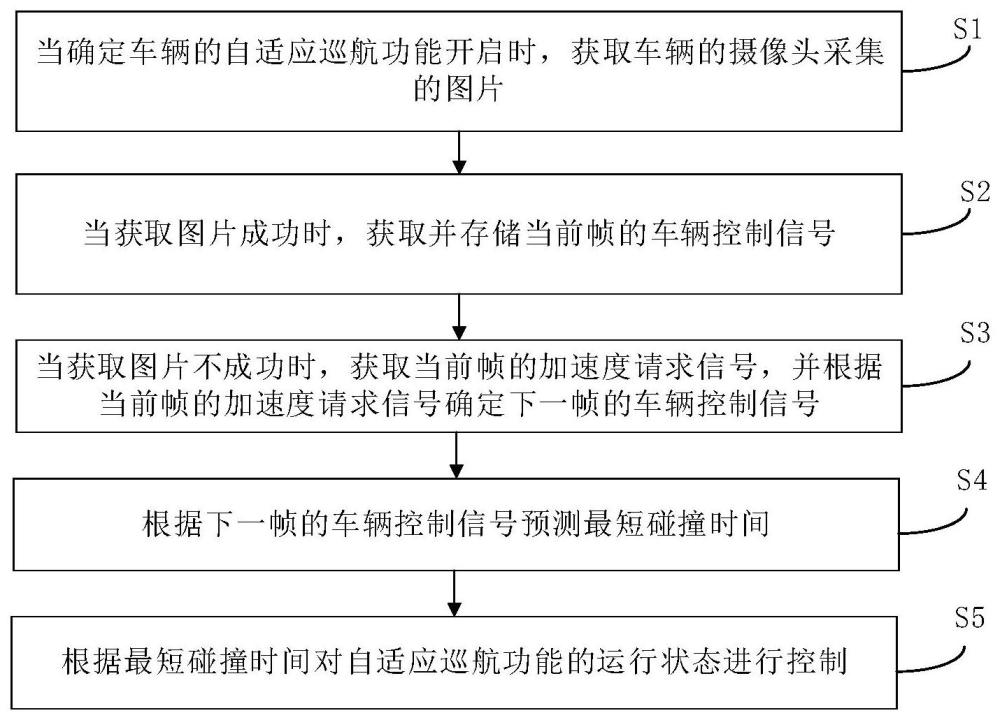
2、本发明提出的一种避免车辆碰撞的控制方法,包括:当确定车辆的自适应巡航功能开启时,获取所述车辆的摄像头采集的图片;当获取所述图片成功时,获取并存储当前帧的车辆控制信号;当获取所述图片不成功时,获取当前帧的加速度请求信号,并根据所述当前帧的加速度请求信号确定下一帧的车辆控制信号;根据所述下一帧的车辆控制信号预测最短碰撞时间;根据所述最短碰撞时间对所述自适应巡航功能的运行状态进行控制。
3、另外,根据本发明实施例的避免车辆碰撞的控制方法,还可以具有如下附加的技术特征:
4、进一步的,根据所述当前帧的加速度请求信号确定下一帧的车辆控制信号,包括:若所述当前帧的加速度请求信号为零,则将所述当前帧的车辆控制信号作为所述下一帧的车辆控制信号;若所述当前帧的加速度请求信号不为零,则根据存储的所述车辆控制信号预测下一帧的车辆控制信号。
5、进一步的,根据存储的所述车辆控制信号预测下一帧的车辆控制信号,包括:若存储的所述车辆控制信号的帧数等于预设帧数,则根据存储的所述车辆控制信号预测所述下一帧的车辆控制信号;若存储的所述车辆控制信号的帧数小于所述预设帧数时,则返回执行所述获取所述车辆的摄像头采集的图片的步骤。
6、进一步的,在返回执行所述获取所述车辆的摄像头采集的图片的步骤之后,还包括:当在第一预设时间内,获取所述图片不成功时,发出报警信息,并控制所述自适应巡航功能关闭。
7、进一步的,根据存储的所述车辆控制信号预测所述下一帧的车辆控制信号,包括:确定所述车辆控制信号对应的航迹函数和目标函数;根据存储的所述车辆控制信号、所述航迹函数对所述目标函数进行优化;将优化后的所述目标函数的参数代入所述航迹函数中;根据所述航迹函数预测所述下一帧的车辆控制信号。
8、进一步的,所述目标函数为:
9、
10、其中,g(a,b,c,m)为所述目标函数,y已知为存储的所述车辆控制信号中第k帧车辆控制信号对应的值,p(a,b,c,x)为所述航迹函数,a,b,c为所述航迹函数的参数,m为拉格朗日系数,sk为存储的所述车辆控制信号中第k帧的本车与前车之间的距离信号的值,vk为存储的所述车辆控制信号中第k帧的速度信号的值,v0为目标速度信号,t为存储的所述车辆控制信号中两帧相邻车辆控制信号之间的时间间隔,p0为所述车辆控制信号的终态值。
11、进一步的,所述航迹函数为二次函数。
12、进一步的,根据存储的所述车辆控制信号、所述航迹函数对所述目标函数进行优化,包括:确定优化模型;基于所述优化模型,从存储的所述车辆控制信号代入所述优化模型中的迭代公式,通过迭代逼近所述目标函数的最小值。
13、进一步的,在根据存储的所述车辆控制信号、所述航迹函数对所述目标函数进行优化之前,还包括:根据所述加速度请求信号确定所述车辆控制信号的终态值;其中,所述车辆控制信号的终态值是当所述车辆当前帧的加速度请求信号不为零,且不与所述前车碰撞时,所述车辆控制信号的最终目标值。
14、进一步的,所述车辆控制信号包括所述车辆的加速度信号,根据所述加速度请求信号确定所述车辆控制信号的终态值,包括:当所述加速度请求信号为正时,所述车辆控制信号的终态值为零;当所述加速度请求信号为负时,将所述车辆控制信号中的目标加速度信号作为所述加速度信号的终态值。
15、进一步的,根据所述下一帧的车辆控制信号预测最短碰撞时间,包括:
16、
17、其中,t为所述最短碰撞时间,v下为所述下一帧的车辆控制信号中车速信号的值,ajmax为预设的最大减速度的绝对值,s下为所述下一帧的车辆控制信号中本车与前车之间的距离信号的值。
18、进一步的,根据所述最短碰撞时间对所述自适应巡航功能的运行状态进行控制,包括:当所述最短碰撞时间大于第二预设时间时,控制所述自适应巡航功能关闭;当所述最短碰撞时间不大于所述第二预设时间时,控制所述自适应巡航功能保持开启。
19、进一步的,当所述最短碰撞时间不大于所述第二预设时间时,还包括:用预测的所述下一帧的车辆控制信号替换第一帧的车辆控制信号,并返回执行所述获取所述车辆的摄像头采集的图片的步骤。
20、进一步的,在存储当前帧的车辆控制信号时,包括:将所述当前帧的车辆控制信号存储至循环队列;当所述循环队列的存储空间存满时,将所述当前帧的车辆控制信号存储至所述循环队列中第一帧的车辆控制信号所在的存储空间。
21、进一步的,在根据所述下一帧的车辆控制信号预测最短碰撞时间之后,还包括:当判断所述最短碰撞时间大于第二预设时间时,发出报警信息;当判断所述最短碰撞时间不大于所述第二预设时间时,不发出所述报警信息。
22、进一步的,所述车辆控制信号至少包括所述车辆的速度信号、本车与前车之间的距离信号,和/或,所述车辆的加速度信号。
23、根据本发明实施例的避免车辆碰撞的控制方法,当确定车辆的自适应巡航功能开启时,获取车辆的摄像头采集的图片,当获取图片成功时,获取并存储当前帧的车辆控制信号,当获取图片不成功时,获取当前帧的加速度请求信号,并根据当前帧的加速度请求信号确定下一帧的车辆控制信号,根据下一帧的车辆控制信号预测最短碰撞时间,根据最短碰撞时间对自适应巡航功能的运行状态进行控制,以使摄像头在丢帧的情况下,仍然能够根据当前的加速度请求信号确定下一帧的车辆控制信号,以避免与前车发生碰撞;同时由于本发明仅使用摄像头对前车进行侦测,具有极大的成本优势。
24、针对上述存在的问题,本发明还提出一种避免车辆碰撞的控制装置,包括:处理器、存储器,以及存储在所述存储器上并可在所述处理器上运行的避免车辆碰撞的控制程序,所述避免车辆碰撞的控制程序被所述处理器执行时实现如上述任一实施例所述的避免车辆碰撞的控制方法。
25、根据本发明实施例的避免车辆碰撞的控制装置,当确定车辆的自适应巡航功能开启时,获取车辆的摄像头采集的图片,当获取图片成功时,获取并存储当前帧的车辆控制信号,当获取图片不成功时,获取当前帧的加速度请求信号,并根据当前帧的加速度请求信号确定下一帧的车辆控制信号,根据下一帧的车辆控制信号预测最短碰撞时间,根据最短碰撞时间对自适应巡航功能的运行状态进行控制,以使摄像头在丢帧的情况下,仍然能够根据当前的加速度请求信号确定下一帧的车辆控制信号,以避免与前车发生碰撞;同时由于本发明仅使用摄像头对前车进行侦测,具有极大的成本优势。
26、针对上述存在的问题,本发明还提出一种车辆,该车辆包括:摄像头和如上述任一实施例所述的避免车辆碰撞的控制装置。
27、根据本发明实施例的车辆,当确定车辆的自适应巡航功能开启时,获取车辆的摄像头采集的图片,当获取图片成功时,获取并存储当前帧的车辆控制信号,当获取图片不成功时,获取当前帧的加速度请求信号,并根据当前帧的加速度请求信号确定下一帧的车辆控制信号,根据下一帧的车辆控制信号预测最短碰撞时间,根据最短碰撞时间对自适应巡航功能的运行状态进行控制,以使摄像头在丢帧的情况下,仍然能够根据当前的加速度请求信号确定下一帧的车辆控制信号,以避免与前车发生碰撞;同时由于本发明仅使用摄像头对前车进行侦测,具有极大的成本优势。
28、针对上述存在的问题,本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有避免车辆碰撞的控制程序,所述避免车辆碰撞的控制程序被处理器执行时实现如上述任一实施例所述的避免车辆碰撞的控制方法。
29、根据本发明实施例的计算机可读存储介质,其上存储的车辆的避免车辆碰撞的控制程序被处理器执行时,当确定车辆的自适应巡航功能开启时,获取车辆的摄像头采集的图片,当获取图片成功时,获取并存储当前帧的车辆控制信号,当获取图片不成功时,获取当前帧的加速度请求信号,并根据当前帧的加速度请求信号确定下一帧的车辆控制信号,根据下一帧的车辆控制信号预测最短碰撞时间,根据最短碰撞时间对自适应巡航功能的运行状态进行控制,以使摄像头在丢帧的情况下,仍然能够根据当前的加速度请求信号确定下一帧的车辆控制信号,以避免与前车发生碰撞;同时由于本发明仅使用摄像头对前车进行侦测,具有极大的成本优势。
30、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251248.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表