车辆控制方法及车辆控制装置与流程
- 国知局
- 2024-08-02 16:40:22
本发明涉及车辆控制方法及车辆控制装置。
背景技术:
1、在下述专利文献1中记载了当探测到前行车辆的停止时,使本车辆减速至最低速度,使其在距前行车辆的规定距离停止的追随行驶装置。
2、现有技术文献
3、专利文献
4、专利文献1:(日本)特开2001-225669号公报
技术实现思路
1、发明所要解决问题
2、但是,本车辆行驶的第一道路上的第一其它车辆越过交叉点的停止线而停车的结果是,存在干涉从与第一道路交叉的第二道路向第一道路的对向车道转弯的第二其它车辆的行进路线的情况。在发生了这种状况的情况下,若本车辆接近第一其它车辆停车,则会妨碍第一其它车辆以不干涉第二其它车辆的方式调整停车位置,有可能无法解决第一其它车辆和第二其它车辆的干涉。
3、本发明的目的在于,即使在本车辆行驶的第一道路上的第一其它车辆越过交叉点的停止线而停车的情况下,也能够促进从与第一道路交叉的第二道路向第一道路的对向车道转弯的第二其它车辆和第一其它车辆之间的干涉的解决。
4、用于解决问题的技术方案
5、根据本发明的一实施方式,提供一种车辆控制方法,以使本车辆和前行车辆之间或本车辆和停止线之间的间隔成为规定的目标距离的方式使本车辆停止。在车辆控制方法中,判定在本车辆前方的距本车辆规定距离内,本车辆行驶的行驶道路和交叉道路在存在交通信号灯的交叉点交叉,且行驶道路是否具有车辆在与本车辆的行进方向相同的方向上行驶的对象车道和车辆在与本车辆的行进方向相反的方向上行驶的对向车道,将至交叉点为止的区间中的对象车道上的先头车辆检测为对象车辆,判定本车辆是否是位于对象车辆的正后方的后续车辆、或者对象车道是否是被夹在对向车道和相邻车道之间且在至交叉点为止的区间中本车辆是否是相邻车道上的先头车辆,在本车辆是后续车辆的情况下,设定比本车辆不是后续车辆的情况更长的目标距离、或者在本车辆是相邻车道上的先头车辆的情况下,设定比本车辆不是相邻车道上的先头车辆的情况更长的目标距离。
6、发明效果
7、根据本发明,即使在本车辆行驶的第一道路上的第一其它车辆越过交叉点的停止线而停车的情况下,也能够促进从与第一道路交叉的第二道路向第一道路的对向车道转弯的第二其它车辆和第一其它车辆之间的干涉的解决。
8、本发明的目的及优点使用权利要求书中所示的要素及其组合来具体化实现。上述一般的描述及以下的详细描述均是简单的例示及说明,应理解为不是如权利要求书那样限定本发明。
技术特征:1.一种车辆控制方法,以使本车辆和前行车辆之间或所述本车辆和停止线之间的间隔成为规定的目标距离的方式使所述本车辆停止,其特征在于,
2.根据权利要求1所述的车辆控制方法,其特征在于,
3.根据权利要求1或2中任一项所述的车辆控制方法,其特征在于,
4.根据权利要求1所述的车辆控制方法,其特征在于,
5.根据权利要求4所述的车辆控制方法,其特征在于,
6.根据权利要求5所述的车辆控制方法,其特征在于,
7.根据权利要求1所述的车辆控制方法,其特征在于,
8.一种车辆控制装置,其以使本车辆和前行车辆之间或所述本车辆和停止线之间的间隔成为规定的目标距离的方式使所述本车辆停止,其特征在于,
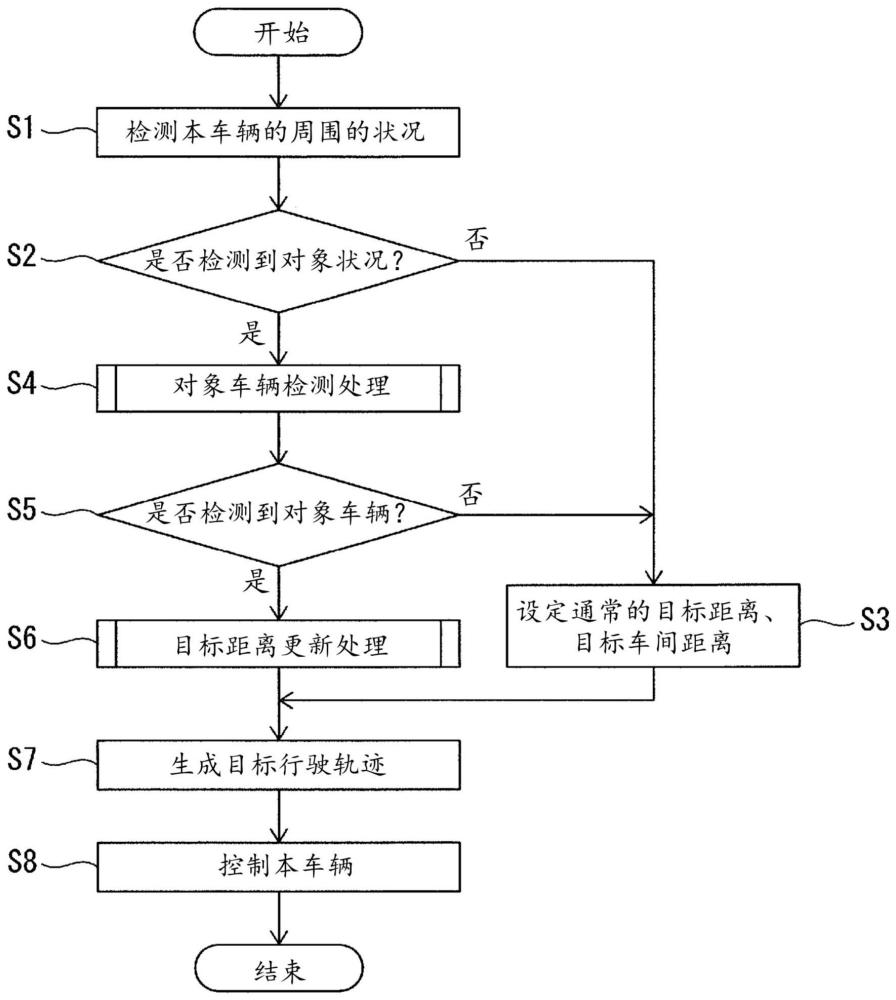
技术总结一种车辆控制方法,以使本车辆和前行车辆之间或本车辆和停止线之间的间隔成为规定的目标距离的方式使本车辆停止,其中,判定在本车辆前方的距本车辆规定距离内有交叉点,且判定本车辆行驶的行驶道路是否具有车辆在与本车辆相同的方向上行驶的对象车道和车辆在与本车辆相反的方向上行驶的对向车道(S1),将至交叉点为止的区间中的对象车道上的先头车辆检测为对象车辆,判定本车辆是否是位于对象车辆的正后方的后续车辆、或者对象车道是否是被夹在对向车道和相邻车道之间且在至交叉点为止的区间中本车辆是否是相邻车道上的先头车辆(S13、S15、S17),在本车辆是后续车辆的情况下,设定与本车辆不是后续车辆的情况相比更长的目标距离、或者在本车辆是相邻车道上的先头车辆的情况下,设定与本车辆不是相邻车道上的先头车辆的情况相比更长的目标距离(S6)。技术研发人员:D·M·冈戈拉弗洛雷斯,高田裕史受保护的技术使用者:日产自动车株式会社技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/251895.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表