用于再起动机动车辆的再起动方法与流程
- 国知局
- 2024-08-02 16:40:26
本发明要求于2021年11月23日提交的法国申请2112408的优先权,该申请的内容(文本、附图和权利要求)通过引用并入本文。本发明的技术背景是用于调节和管控机动车辆的调节和管控装置的技术背景。更具体地,本发明涉及能够管控对于已事先固定不动的机动车辆的自动再起动的装置。更具体地,本发明涉及一种再起动方法。
背景技术:
1、在现有技术中,已知速度调节器,所述速度调节器能够根据被跟随机动车辆的速度以及根据分隔所述被跟随机动车辆与运载机动车辆的距离控制所述运载机动车辆的牵引系。在所述被跟随机动车辆例如由于通行条件而固定不动的情况下,所述运载机动车辆的速度调节器使所述运载机动车辆停止在与所述被跟随机动车辆隔有距离处,所述距离由停止距离设定值造成。
2、当所述被跟随机动车辆重新再起动时,预料到所述运载机动车辆重新再起动以便恢复更早时经中断的运动。
3、在这种再起动情形中,已知手动命令,所述手动命令在所述运载机动车辆的用户的激励下再激活所述速度调节器。在该情况下,由用户确定其所期望再激活速度调节器和再发动其机动车辆的时刻。这些手动命令的缺陷在于,这些手动命令需要用户的干预。所述运载机动车辆因此不能够完全自主地决定其再起动。而且,该情况可能导致来自用户方面的在要求机动车辆再起动的相关性方面的评估错误。当所述可见性非常低时或者在特别困难的通行条件(其中,所述被跟随机动车辆再起动以在几分米处或更远处重新停止,这导致所述运载机动车辆的乘客的不适以及不经济的运行)中,尤其是这种情况。
4、在这种再起动情形中,尤其是在自主车辆上,还已知速度调节器,所述速度调节器能够当所述被跟随机动车辆再起动时再发动所述运载机动车辆。这种速度调节器由此确定在所述被跟随机动车辆与所述运载机动车辆之间的飞行时间(temps de vol)以便决定所述再起动。当所述运载机动车辆处于停止时,这种参数不是最佳的。
技术实现思路
1、本发明旨在提供一种新的用于再起动机动车辆的再起动方法,以便至少大部分地解决上述问题,并且还带来了其它优点。
2、本发明的另一目的在于更优地评估运载机动车辆的再起动条件。
3、本发明的另一目的在于优化运载机动车辆的乘客的舒适性。
4、本发明的另一目的在于减少运载机动车辆的能量消耗。
5、根据本发明的第一方面,通过一种用于再起动在所谓的被跟随机动车辆后方固定不动的所谓的运载机动车辆的再起动方法来达到上述目的中的至少一个,所述再起动方法由管控单元实施,并且包括以下步骤:
6、﹣用于检测分隔所述运载机动车辆与所述被跟随机动车辆的距离的检测步骤;
7、﹣用于检测所述被跟随机动车辆的移动速度的检测步骤;
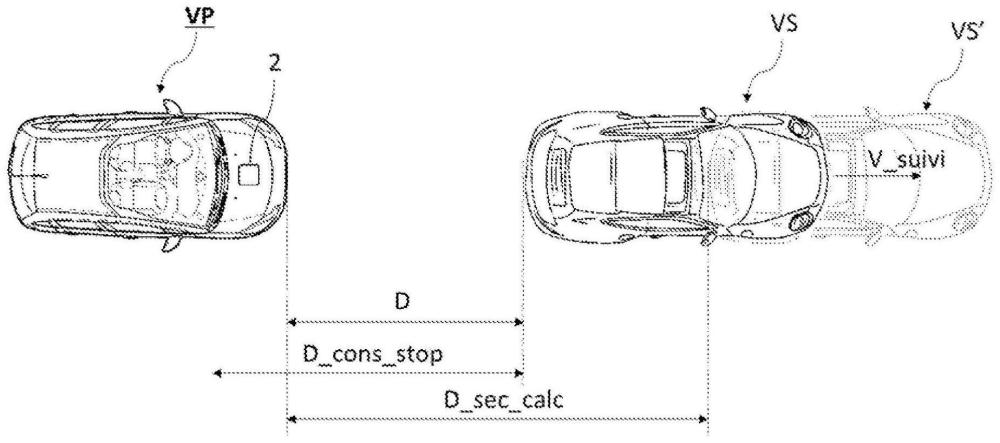
8、﹣用于确定经计算安全距离(d_sec_calc)的确定步骤,所述经计算安全距离经限定为:d_sec_calc=d﹣d_cons_stop+v_suivi×ta,其中,d是分隔所述运载机动车辆与所述被跟随机动车辆的距离,d_cons_stop是所述运载机动车辆的停止距离设定值,v_suivi是所述被跟随机动车辆的移动速度,并且,ta是安全延时;
9、﹣用于对所述经计算安全距离与阈值安全距离进行比较的比较步骤,所述运载机动车辆的牵引系经操控用于在所述经计算安全距离大于所述阈值安全距离的情况下在所述运载机动车辆的驱动车轮上生成非零发动机转矩。
10、在本发明的背景中,分隔所述运载机动车辆与所述被跟随机动车辆的距离经采取自所述运载机动车辆的前保险杠与所述被跟随机动车辆的后保险杠之间。所述经计算安全距离从所述运载机动车辆的前保险杠起确定。所述运载机动车辆的停止距离设定值是分隔所述运载机动车辆与所述被跟随机动车辆的距离,并且,当所述运载机动车辆已由所述运载机动车辆的速度调节器固定不动时,所述运载机动车辆需处于在或处于在所述停止距离设定值处。所述停止距离设定值经采取自所述运载机动车辆的前保险杠与所述被跟随机动车辆的后保险杠之间。
11、从本发明的背景中理解到,所述运载机动车辆在所述被跟随机动车辆后方固定不动,当所述运载机动车辆处于停止且具有零速度时,所述运载机动车辆的制动器经激活,以便刹住所述运载机动车辆的车轮。任选地在这种情形中,“停启”类型的自动再起动装置可被激活,以便节约能量以及限制污染物排放。
12、所述被跟随车辆(其可能触发符合本发明第一方面的再起动方法的后续步骤)的经检测移动优选地是纵向移动类型的,也就是说,所述移动的效果在于使分隔所述被跟随车辆与所述运载车辆的距离发生变化。在这种情况下,所述经检测移动优选地涉及朝向所述被跟随车辆前方的移动。
13、如上文所述,本发明的背景是运载机动车辆的背景,所述运载机动车辆的牵引系尤其经由速度调节器调节。这种运载机动车辆(其速度调节器由此经激活)将在所述再起动方法的实施之前使所述运载机动车辆在与所述被跟随机动车辆隔有距离处固定不动。符合本发明第一方面的再起动方法由此能够当所述安全性条件经验证时使所述运载机动车辆再起动。更具体地,“再起动”理解成在运载机动车辆vp的驱动车轮上生成发动机转矩,以便使所述运载机动车辆投入运动。
14、用于检测分隔所述运载机动车辆与所述被跟随机动车辆的距离的检测步骤借助于任何能够确定距离的检测器实施。作为非限制性示例,所述检测器可涉及用于确定在所述被跟随车辆上反射的波(例如激光)的飞行时间的传感器或激光雷达(lidar,即“laserimaging detection and ranging”,其表示通过激光实施的距离检测和估算系统)类型的系统。
15、用于检测所述被跟随机动车辆的移动速度的检测步骤由任何在所述运载机动车辆上可用的部件实施。作为非限制性示例,用于检测所述移动速度的检测步骤可通过对于在所述运载机动车辆的通信网络上可用的变量(其表征所述被跟随机动车辆的移动速度)的读取实施,或者借助于装载在所述运载机动车辆上的例如在飞行时间测量上运行的速度传感器实施。
16、所述用于确定经计算安全距离的确定步骤由所述管控单元实施。所述管控单元例如是微控制器或处理器类型的。通常,所述管控单元包括计算部件和存储部件(其例如采取存储区域的形式)。
17、在用于确定所述经计算安全距离的确定步骤中,所述被跟随机动车辆的移动速度是在前一步骤中确定的移动速度。
18、在对于所述经计算安全距离的计算中使用的安全延时由此能够生成在所述被跟随车辆的再起动与所述运载车辆的再起动之间的相移,该相移取决于所述运载机动车辆所固有的运行参数,如在下文中将在符合本发明第一方面的本发明特别改进中所描述的那样。
19、本发明接下来实施用于对所述经计算安全距离与所述阈值安全距离进行比较的比较步骤,以确定所述运载机动车辆是否需再起动。当所述经计算安全距离大于所述阈值安全距离时,则所述被跟随机动车辆与所述运载机动车辆隔有足以激活所述运载机动车辆的再起动的足够距离。否则,所述运载机动车辆当然维持处于停止。
20、依据本发明第一方面,本发明能够优化所述运载机动车辆在所述被跟随机动车辆之后再起动的条件。特别是,本发明能够在所述被跟随机动车辆恰好在其再起动之后重新制动的情况下优化用户安全性和舒适性。
21、符合本发明第一方面的再起动方法有利地包括以下改进中的至少一个,形成这些改进的技术特征可单独地采取或组合地采取:
22、﹣所述停止距离设定值经定参,并且存储在所述管控单元的存储区域中。有利地,(与经记录于所述管控单元的存储区域中的多个性能轮廓对应的)多个距离设定值使用户能够挑选出经记录值中的一个。与每个性能轮廓对应的值不同于其它性能轮廓的值。优选地,所述停止距离设定值的三个不同值经记录在所述存储区域中,并且与短停止距离、中等停止距离和长停止距离对应;
23、﹣所述停止距离设定值在1m与6m之间。更具体地,在设置有多个停止距离设定值的情况下,短停止距离设定值的值等于3m,中等停止距离设定值的值等于4m,并且,长停止距离设定值的值等于5m;
24、﹣所述安全延时由为了松开所述运载机动车辆的制动器以及为了操控所述运载机动车辆的牵引系以便在所述驱动车轮上生成发动机转矩所需的时长限定。该有利配置由此能够根据(尤其贡献于所述运载机动车辆的制动、固定不动的)不同经装载系统及其牵引链的特征更优地预测所述被跟随机动车辆的再起动。为了松开所述制动器以及为了操控所述运载机动车辆的牵引系以便在所述驱动车轮上生成发动机转矩所需的时长可通过校准确定。作为非限制性示例,所述安全延时大于0.5s。优选地,所述安全延时等于0.7s。该时长构成最佳时长,以不但不会使在所述被跟随机动车辆后方的运载机动车辆过早地再起动,而且不会当所述被跟随机动车辆已被检测视作已恢复其移动时使该延时延长;
25、﹣所述阈值安全距离经定参,并且存储在所述管控单元的存储区域中。“经定参”理解成,所述阈值安全距离是可在定参步骤过程中在所述管控单元的存储区域中预限定的变量。所述定参步骤在工厂中实施,或者,所述定参步骤可由所述运载机动车辆的用户经由用户界面实施;
26、﹣所述阈值安全距离大于或等于1m。该值示出了在所述运载机动车辆的反应性与安全性之间的合适折衷;
27、﹣所述再起动方法还包括用于对所述被跟随机动车辆的速度与阈值安全速度进行比较的比较步骤,所述运载机动车辆的牵引系经操控用于在所述被跟随机动车辆的速度大于所述阈值安全速度的情况下在所述驱动车轮上生成非零发动机转矩。该有利配置能够通过避免所述被跟随机动车辆相对于所述运载机动车辆占据过多的距离和速度来优化所述运载机动车辆的反应性以及优化用户体验;
28、﹣所述阈值安全速度经定参,并且存储在所述管控单元的存储区域中。“经定参”理解成,所述阈值安全距离是可在定参步骤过程中在所述管控单元的存储区域中预限定的变量。所述定参步骤在工厂中实施,或者,所述定参步骤可由所述运载机动车辆的用户经由用户界面实施;
29、﹣所述安全速度大于或等于1m/s。该值示出了在所述运载机动车辆的反应性与安全性之间的合适折衷;
30、﹣所述再起动方法包括后续的用于激活所述运载机动车辆的速度调节器的激活步骤。
31、根据本发明的第二方面,提供了一种管控单元,所述管控单元配置用于通过实施符合本发明第一方面的或根据其中任一项改进的再起动方法操控牵引系。
32、根据本发明的第三方面,提供了一种机动车辆,所述机动车辆包括牵引系和符合本发明第二方面的管控单元。
33、在本发明的背景中,所述机动车辆是自主车辆或半自主车辆类型的。自主车辆例如是4级或5级的自主车辆(其中,驾驶员可什么都不做就在一定时间期间确保对于所述机动车辆的完全操控)。半自主车辆例如是1级、2级或3级的自主车辆(其中,仍然需要驾驶员的干预来确保对于所述机动车辆的完全操控)。
34、通过根据其所有可能组合集成此处经公开的各种可选特征,提供了本发明的各种实施例。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251903.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。