智能体行驶预测模型构建方法、预测方法、设备及介质与流程
- 国知局
- 2024-08-02 16:54:58
本发明涉自动驾驶,具体而言,涉及一种智能体行驶预测模型构建方法、预测方法、设备及介质。
背景技术:
1、自动驾驶技术是汽车未来的重要变革技术之一。预测模块作为自动驾驶算法流程中承上启下的部分,将低级的环境感知数据进行高级抽象表征与理解,并输出周围智能体未来的状态。
2、目前,借助于深度神经网络,自动驾驶汽车能够高精度地推理预测周围智能体的运动轨迹、行为意图和风险水平,进而提高自动驾驶汽车决策与规划模块的正确率和求解速度。基于深度学习的预测方法在准确率和泛化性上已经超越了基于规则与机器学习的方法,也是自动驾驶领域的研究热点。
3、然而,相关技术中,在基于深度学习进行预测时,对于采集的多源数据,采用序列化轨迹输入格式,由于被感知到的智能体轨迹数据持续时长可能长短不一,序列化输入难以对长短不一的输入输出表示,进而导致多智能体时间、空间维度难以对齐。而且栅格化输入冗余的输入不仅浪费计算资源,更可能影响轨迹与行为预测的性能,道路、智能体之间的空间拓扑关系并未被显式建模,这可能导致网络学习难度提升。最终使得在面对复杂多变的交通场景下,其预测的精确度、高可信度的预测仍然不够。
技术实现思路
1、本发明解决的问题是如何提高智能体行驶数据的预测精度。
2、为解决上述问题,第一方面,本发明提供一种智能体行驶数据预测模型构建方法,该方法包括:
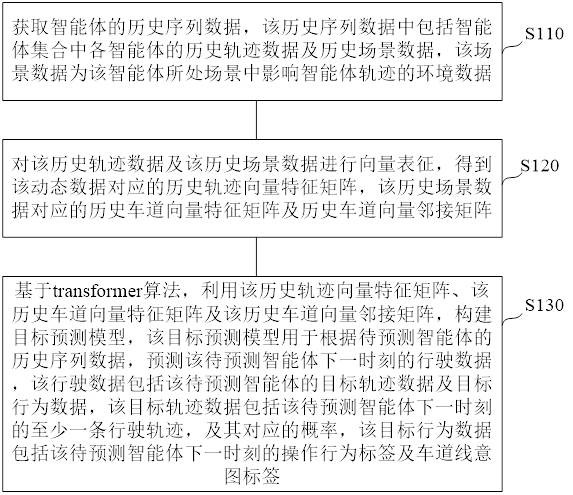
3、获取智能体的历史序列数据,该历史序列数据中包括智能体集合中各智能体的历史轨迹数据及历史场景数据,该历史场景数据为该智能体所处场景中影响智能体轨迹的环境数据;
4、对该历史轨迹数据及该历史场景数据进行向量表征,得到该历史轨迹数据对应的轨迹向量特征矩阵,该历史场景数据对应的车道向量特征矩阵及车道向量邻接矩阵;
5、基于transformer算法,利用该轨迹向量特征矩阵、该车道向量特征矩阵及该车道向量邻接矩阵,构建目标预测模型,该目标预测模型用于根据待预测智能体的历史序列数据,预测该待预测智能体下一时刻的行驶数据,该行驶数据包括该待预测智能体的目标轨迹数据及目标行为数据,该目标轨迹数据包括该待预测智能体下一时刻的至少一条行驶轨迹,及其对应的概率,该目标行为数据包括该待预测智能体下一时刻的操作行为标签及车道线意图标签。
6、第二方面,本发明提供一种智能体行驶数据预测方法,该方法包括:
7、获取待预测智能体的历史序列数据,该历史序列数据中包括待预测智能体集合中各待预测智能体的轨迹数据及场景数据,该场景数据为该待测试智能体所处场景中影响智能体轨迹的环境数据;
8、将该历史序列数据输入至如上述第一方面该智能体行驶预测模型构建方法中所构建的目标预测模型中,输出各待预测智能体下一时刻的行驶数据,该行驶数据包括该待预测智能体的目标轨迹数据及目标行为数据,该目标轨迹数据包括该待预测智能体下一时刻的至少一条行驶轨迹,及其对应的概率,该目标行为数据包括该待预测智能体下一时刻的操作行为标签及车道线意图标签。
9、第三方面,本发明提供一种计算机设备,所述计算机设备包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,该处理器执行该程序时实现如上述第一方面或第二方面所述的方法。
10、第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序用于实现第一方面或第二方面所述的方法。
11、本发明提供的智能体行驶预测模型构建方法、预测方法、设备及介质,通过对获取的各智能体的多源异构数据进行向量统一表征处理,使得序列数据在向量化输入下,智能体的每条轨迹及车道线都是由带属性的向量表示,进而使得在进行预测模型构建时,能够捕捉各智能体的历史轨迹的特征,忽略无用冗余数据,描述有用的拓扑数据,高效建模道路间拓扑关系,进而能够为预测模型构建的提供准确输入,降低模型的学习难度,最终实现智能体行驶预测的目标预测模型的高效快速构建,避免了基于轨迹时间序列的输入方式下,多智能体数据在时间、空间维度难以对齐的缺陷,以及避免基于栅格图的输入格式下,输入中包含许多非感兴趣场景,导致的计算资源浪费,进而能影响轨迹与行为预测的性能。
技术特征:1.一种智能体行驶预测模型构建方法,其特征在于,所述方法包括:
2.根据权利要求1所述的智能体行驶预测模型构建方法,其特征在于,所述轨迹向量特征矩阵中包括在目标智能体的坐标位置为原点的坐标系中,各智能体的坐标值、类型及第一指示数据,所述第一指示数据表示智能体是否在下一时刻被感知到;
3.根据权利要求2所述的智能体行驶预测模型构建方法,其特征在于,所述基于transformer算法,利用所述轨迹向量特征矩阵、所述车道向量特征矩阵及所述车道向量邻接矩阵,构建目标预测模型包括:
4.根据权利要求3所述的智能体行驶预测模型构建方法,其特征在于,所述将所述智能体的轨迹向量特征矩阵、所述车道向量特征矩阵及车道向量邻接矩阵输入基于transformer算法构建的初始预测模型,输出初始预测结果及对应的损失函数包括:
5.根据权利要求4所述的智能体行驶预测模型构建方法,其特征在于,所述对所述轨迹向量特征矩阵进行编码处理包括:
6.根据权利要求4所述的智能体行驶预测模型构建方法,其特征在于,对所述车道向量特征矩阵与车道向量邻接矩阵进行编码处理包括:
7.根据权利要求4所述的智能体行驶预测模型构建方法,其特征在于,所述特征提取模块包括车道线至智能体特征选择模块及智能体至智能体特征选择模块,所述对所述运动学特征、静态车道向量特征及动态车道向量特征进行特征提取,得到所述历史序列数据的感兴趣特征包括:
8.一种智能体行驶预测方法,其特征在于,所述方法包括:
9.一种计算机设备,其特征在于,所述计算机设备包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,该处理器执行该程序时实现如权利要求1-7任一项所述的智能体行驶预测模型构建方法,或权利要求8所述的智能体行驶预测方法。
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序用于实现如权利要求1-7任一项所述的智能体行驶预测模型构建方法,或权利要求8所述的智能体行驶预测方法。
技术总结本发明公开了一种智能体行驶预测模型构建方法、预测方法、设备及介质,包括:获取智能体集合中各智能体的历史轨迹数据及历史场景数据;对历史轨迹数据及历史场景数据进行向量表征,得到轨迹向量特征矩阵、车道向量特征矩阵及车道向量邻接矩阵;基于设置算法,利用轨迹向量特征矩阵、车道向量特征矩阵及车道向量邻接矩阵,构建目标预测模型,目标预测模型用于预测待预测智能体下一时刻的行驶数据。本发明通过对获取的多源异构数据进行向量统一表征处理,使得在进行预测模型构建时,能够捕捉历史轨迹的特征,忽略无用冗余数据,描述有用拓扑数据,高效建模道路间拓扑关系,为预测模型构建的提供准确输入,实现目标预测模型的高效快速构建。技术研发人员:杨飚,卢兴盛受保护的技术使用者:联易云科(北京)科技有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/253039.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表