一种双伸位侧向重卡自动换电池机器人的制作方法
- 国知局
- 2024-08-02 16:55:44
本发明涉及换电控制,尤其是涉及一种双伸位侧向重卡自动换电池机器人。
背景技术:
1、随着社会的发展,在钢铁行业、化工、水泥、火电厂等重污染行业、在城市渣土车、搅拌车及环卫市场、以及在港口、园区、矿山等封闭场景都是纯电动重卡的“主场”,电动重卡只需要电池组及电机驱动动力,工作时也不会产生废气,不排尾气污染,对环境保护和空气的洁净是十分有益的,可以说是真正做到了“零污染”。既具有经济性又具有环保性。
2、但是目前市场上现有的重卡换电设备主要存在以下的缺点:(1)换电设备本体多为固定式的,迁移不便;(2)卡车及电池尺寸种类复杂,从而造成的换电限制多;(3)换电设备对换电的场地及使用环境要求比较苛刻;(4)换电设备单次换电运行的周期长、人为干预多、且危险性高。这些因素严重制约了电动重卡的发展。
3、专利wo2013071682a1公开了一种电动公交车换电机器人系统及方法,该专利包括机器人本体,机器人本体包括机械部分和电气控制部分,所述机械部分包括在x、y、z三个直角坐标方向上设有的水平移动单元、载物平台单元和承重单元,所述载物平台单元上包括设有的载物台以及其上设有的电池驱动机构,所述电池驱动机构上设置有电池推送机构。所述的电气控制部分包括:与主控计算机系统连接的数据采集装置、动力驱动机构、i\o模块。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种双伸位侧向重卡自动换电池机器人。
2、本发明的目的可以通过以下技术方案来实现:
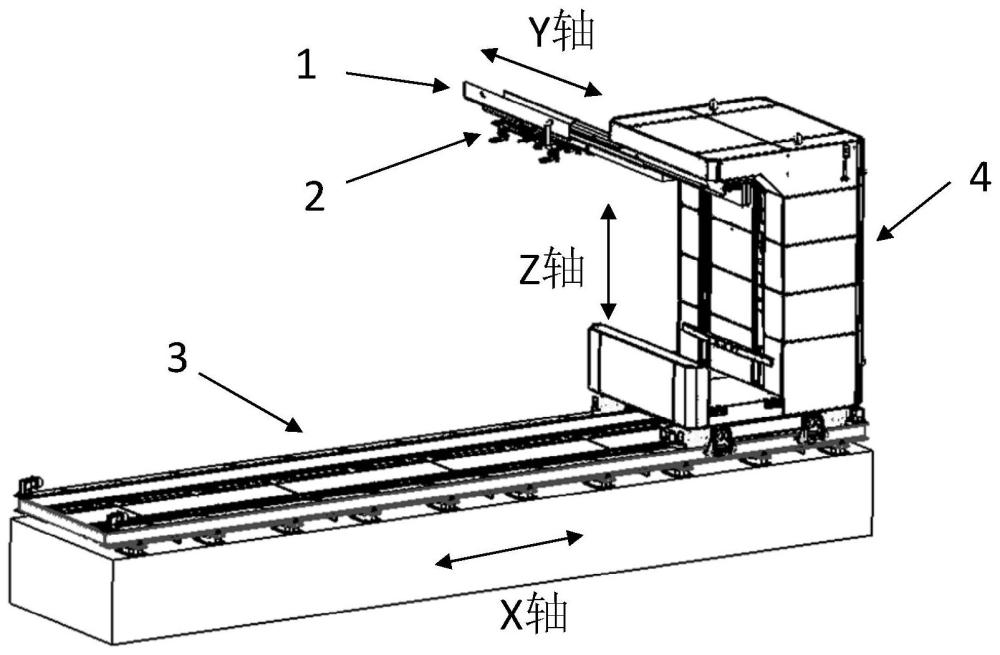
3、本发明的技术方案为提供一种双伸位侧向重卡自动换电池机器人,包括:
4、机器人本体:沿x轴向和z轴线移动;
5、机器人轨道机构:用于所述机器人本体沿x轴向移动;
6、自动伸缩臂机构:设于所述机器人本体上,沿y轴向移动;
7、自适应吊具机构:设于所述自动伸缩臂机构上,用于抓取电池。
8、进一步地,所述自动伸缩臂机构包括依次串联连接的一级伸缩臂、二级伸缩臂和三级伸缩臂。
9、更进一步地,所述一级伸缩臂上设有第一动力组件、传动组件和用于感应所述电池位置的第一位置检测传感器;所述二级伸缩臂上设有与所述机器人本体连接的上下连接板和用于牵引和保护所述二级伸缩臂的第一拖链组件;所述三级伸缩臂上设有走线组件。所述走件组件作为辅助支架支撑所述三级伸缩臂。
10、进一步地,所述自适应吊具机构包括安装底板、对称设于所述安装底板上的若干个用于连接所述三级伸缩臂的左右连接板、沿所述安装底板中轴线对称设置在所述安装底板一侧边并用于抓取所述电池的吊钩、设于所述安装底板底面的第二动力组件、设于所述吊钩旁并用于感应所述电池位置的第二位置检测传感器,以及设于所述吊钩之间并用于防止所述自适应吊具机构碰撞到异物的防碰撞组件。
11、更进一步地,所述防碰撞组件包括极限形成开关和防碰撞机械限位块,所述极限形成开关设于所述吊钩的中间位置,所述防碰撞机械限位块沿所述极限形成开关对称设置在所述吊钩之间。
12、所述极限行程开关为电气防碰撞组件,所述防碰撞机械限位块为机械防碰撞组件,当所述自适应吊具机构降低到极限位置时,则启动所述极限行程开关,使得整个机器人停止运作。
13、进一步地,机器人轨道机构包括轨道板、设于所述轨道板上的轨道、设于所述轨道之间的维保通道、与所述轨道平行且设置于所述轨道板上并用于牵引和保护所述轨道的第二拖链组件、设于所述轨道板底端的若干个用于调整所述机器人本体平衡的重型水平调整组件、设于所述轨道板一端并用于防所述机器人本体碰撞的挡块、以及设于所述轨道板四周并用于感应外人或异物避免其闯入的防侵入组件。
14、进一步地,所述机器人本体上设有立柱支架,
15、所述立柱支架一面上包括沿z轴向设置的提升轨道、设于所述提升轨道上并带动所述自动伸缩臂机构上下移动的悬臂升降滑架、感应所述电池的激光定位传感器、和用于摆正所述电池的电池导向组件,
16、所述立柱支架另一面上包括设有的提升电机、连接所述悬臂升降滑架和所述提升电机的皮带提升转向组件、使得所述机器人本体故障时处于待机状态的替罪羊组件、配线组件、和控制箱,
17、所述立柱支架底端两侧对称设有用于环抱所述轨道的防侧倾组件,所述立柱支架底端中央设有轨道行走轮箱,所述轨道行走轮箱上设有轨道行走电机,所述轨道行走轮箱的两端还均连接有轨道行走联轴器,所述轨道行走联轴器的另一端连接有滑行在所述轨道上的轨道行走车轮。
18、所述配线组件的一端固定在所述立柱支架上,另一端固定在所述悬臂升降滑架上。
19、所述控制箱内设有接收和发布指令用于调控整个机器人运作的控制器。
20、更进一步地,所述悬臂升降滑架上还设有提升自平衡组件,所述悬臂升降滑架的相对两侧壁还设有滑行在所述提升轨道上的滑轮,所述悬臂升降滑架还与所述自动伸缩臂机构固定连接,所述轨道行走车轮上还设有轨道障碍清除板。
21、所述提升自平衡组件用于平衡所述悬臂升降滑架,所述轨道障碍清除板用于扫除在所述轨道上的障碍物。
22、进一步地,所述立柱支架的两面还设有包装除所述提升轨道和所述悬臂升降滑架之外所有部件的封装箱。
23、更进一步地,所述封装箱上还设有运行指示灯。重卡根据所述运行指示灯的指示驶入规定的换电区域。
24、与现有技术相比,本发明具有如下有益效果:
25、(1)本发明通过激光定位传感器、若干个位置检测传感器,准确对电池进行定位抓取,完成换电池的工作,定位精度可达到±2mm。
26、(2)本发明利用控制箱内的控制器通过以太网接入公用或专用网络,实现远程、无人化控制、监测、升级、维护工作。
27、(3)本发明通过提升自平衡组件,实现悬臂升降滑架的自动平衡,从而实现本发明运行时的稳定,缩短了更换电池的周期时长。
28、(4)本发明能够自动实现重卡内的电池位置和换电站及换电平台的电池位置互换,以及换电站及换电平台内部电池位置的互换,实现多通道、智能化的设备布置,解决场地限制的问题。
29、(5)本发明为模块设计,方便拆除转运,以及实现转场功能。
技术特征:1.一种双伸位侧向重卡自动换电池机器人,其特征在于,包括:
2.根据权利要求1所述的一种双伸位侧向重卡自动换电池机器人,其特征在于,所述自动伸缩臂机构(1)包括依次串联连接的一级伸缩臂(7)、二级伸缩臂(11)和三级伸缩臂(13)。
3.根据权利要求2所述的一种双伸位侧向重卡自动换电池机器人,其特征在于,所述一级伸缩臂(7)上设有第一动力组件(9)、传动组件(10)和用于感应所述电池位置的第一位置检测传感器(8);所述二级伸缩臂(11)上设有与所述机器人本体(4)连接的上下连接板(6)和用于牵引和保护所述二级伸缩臂(11)的第一拖链组件(5);所述三级伸缩臂(13)上设有走线组件(12)。
4.根据权利要求2所述的一种双伸位侧向重卡自动换电池机器人,其特征在于,所述自适应吊具机构(2)包括安装底板(14)、对称设于所述安装底板(14)上的若干个用于连接所述三级伸缩臂(13)的左右连接板(20)、沿所述安装底板(14)中轴线对称设置在所述安装底板(14)一侧边并用于抓取所述电池的吊钩(17)、设于所述安装底板(14)底面的第二动力组件(19)、设于所述吊钩(17)旁并用于感应所述电池位置的第二位置检测传感器(18),以及设于所述吊钩(17)之间并用于防止所述自适应吊具机构(2)碰撞到异物的防碰撞组件。
5.根据权利要求4所述的一种双伸位侧向重卡自动换电池机器人,其特征在于,所述防碰撞组件包括极限行程开关(16)和防碰撞机械限位块(15),所述极限行程开关(16)设于所述吊钩(17)的中间位置,所述防碰撞机械限位块(15)沿所述极限行程开关(16)对称设置在所述吊钩(17)之间。
6.根据权利要求1所述的一种双伸位侧向重卡自动换电池机器人,其特征在于,机器人轨道机构(3)包括轨道板(23)、设于所述轨道板(23)上的轨道(24)、设于所述轨道(24)之间的维保通道(27)、与所述轨道(24)平行且设于所述轨道板(23)上并用于牵引和保护所述轨道(24)的第二拖链组件(26)、设于所述轨道板(23)底端的若干个用于调整所述机器人本体(4)平衡的重型水平调整组件(25)、设于所述轨道板(23)一端并用于防所述机器人本体(4)碰撞的挡块(22)、以及设于所述轨道板(23)四周并用于感应外人或异物避免其闯入的防侵入组件(21)。
7.根据权利要求1所述的一种双伸位侧向重卡自动换电池机器人,其特征在于,所述机器人本体(4)上设有立柱支架(32),
8.根据权利要求7所述的一种双伸位侧向重卡自动换电池机器人,其特征在于,所述悬臂升降滑架(29)上还设有提升自平衡组件(33),所述悬臂升降滑架(29)的相对两侧壁还设有滑行在所述提升轨道(34)上的滑轮,所述悬臂升降滑架(29)还与所述自动伸缩臂机构(1)固定连接,所述轨道行走车轮上还设有轨道障碍清除板(36)。
9.根据权利要求7所述的一种双伸位侧向重卡自动换电池机器人,其特征在于,所述立柱支架(32)的两面还设有包装除所述提升轨道(34)和所述悬臂升降滑架(29)之外所有部件的封装箱(30)。
10.根据权利要求9所述的一种双伸位侧向重卡自动换电池机器人,其特征在于,所述封装箱(30)上还设有运行指示灯(28)。
技术总结本发明涉及一种双伸位侧向重卡自动换电池机器人,包括:机器人本体:沿X轴向和Z轴向移动;机器人轨道机构:用于所述机器人本体沿X轴向移动;自动伸缩臂机构:设于所述机器人本体上,沿Y轴向移动;自适应吊具机构:设于所述自动伸缩臂机构上,用于抓取电池。与现有技术相比,本发明能实现远程、无人化控制、监测、升级、维护工作,定准定位抓取电池,缩短更换电池的周期时长。技术研发人员:黄立志受保护的技术使用者:上海沃典工业自动化有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/253085.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。